
ICRA 2025|通用多机器人长时任务规划框架破解任务分配难题,成功率+105%、效率+36%
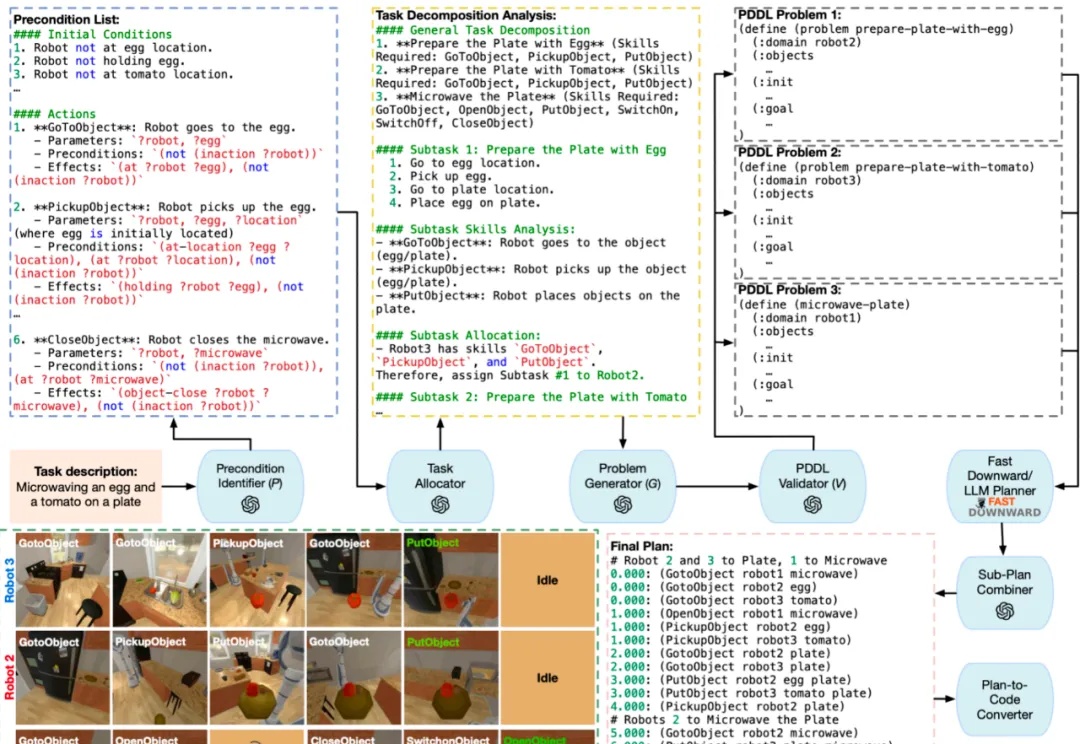
ICRA 2025|通用多机器人长时任务规划框架破解任务分配难题,成功率+105%、效率+36%2025 年 5 月,美国加州大学河滨分校 (UC Riverside) 与宾夕法尼亚州立大学 (Penn State University) 联合团队在机器人领域顶级会议 ICRA 2025 上发布最新研究成果 LaMMA-P。
来自主题: AI技术研报
8772 点击 2025-05-20 14:50