
CVPR史上首次!中国车厂主讲AI大模型,自动驾驶也玩Scaling Law?
CVPR史上首次!中国车厂主讲AI大模型,自动驾驶也玩Scaling Law?不去今年的CVPR不知道,原来中国自动驾驶在AI领域的创新已经这么牛了。作为今年唯一受邀参与CVPR演讲的车企,这家公司在AI顶流圈层上桌吃饭了!
来自主题: AI资讯
10940 点击 2025-06-16 16:52
 搜索
搜索
不去今年的CVPR不知道,原来中国自动驾驶在AI领域的创新已经这么牛了。作为今年唯一受邀参与CVPR演讲的车企,这家公司在AI顶流圈层上桌吃饭了!
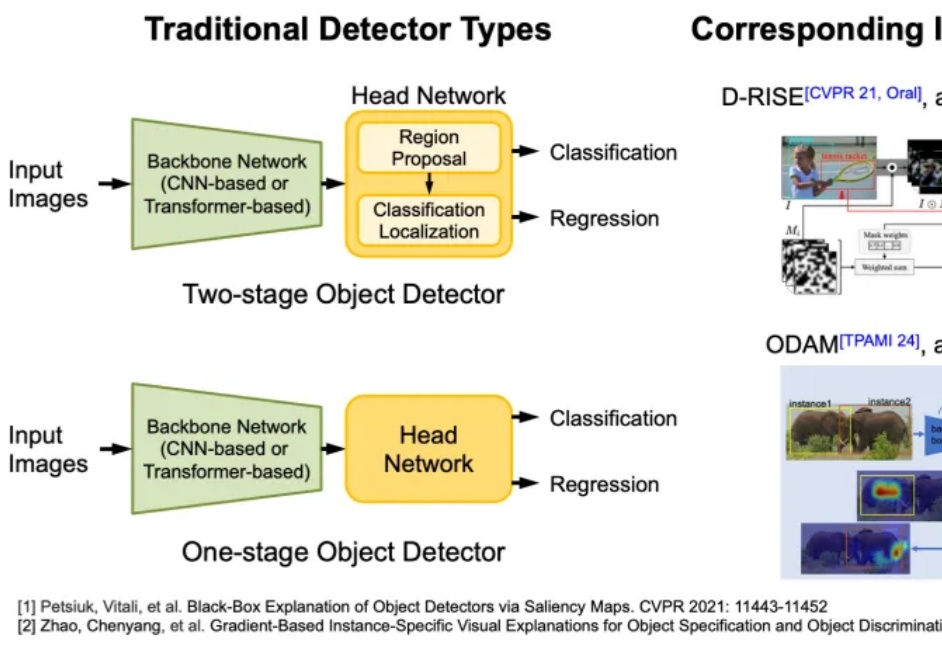
AI 决策的可靠性与安全性是其实际部署的核心挑战。当前智能体广泛依赖复杂的机器学习模型进行决策,但由于模型缺乏透明性,其决策过程往往难以被理解与验证,尤其在关键场景中,错误决策可能带来严重后果。因此,提升模型的可解释性成为迫切需求。

AI 决策的可靠性与安全性是其实际部署的核心挑战。当前智能体广泛依赖复杂的机器学习模型进行决策,但由于模型缺乏透明性,其决策过程往往难以被理解与验证,尤其在关键场景中,错误决策可能带来严重后果。因此,提升模型的可解释性成为迫切需求。

就在刚刚的CVPR上,鹅厂3D生成模型混元3D 2.1正式宣布开源!
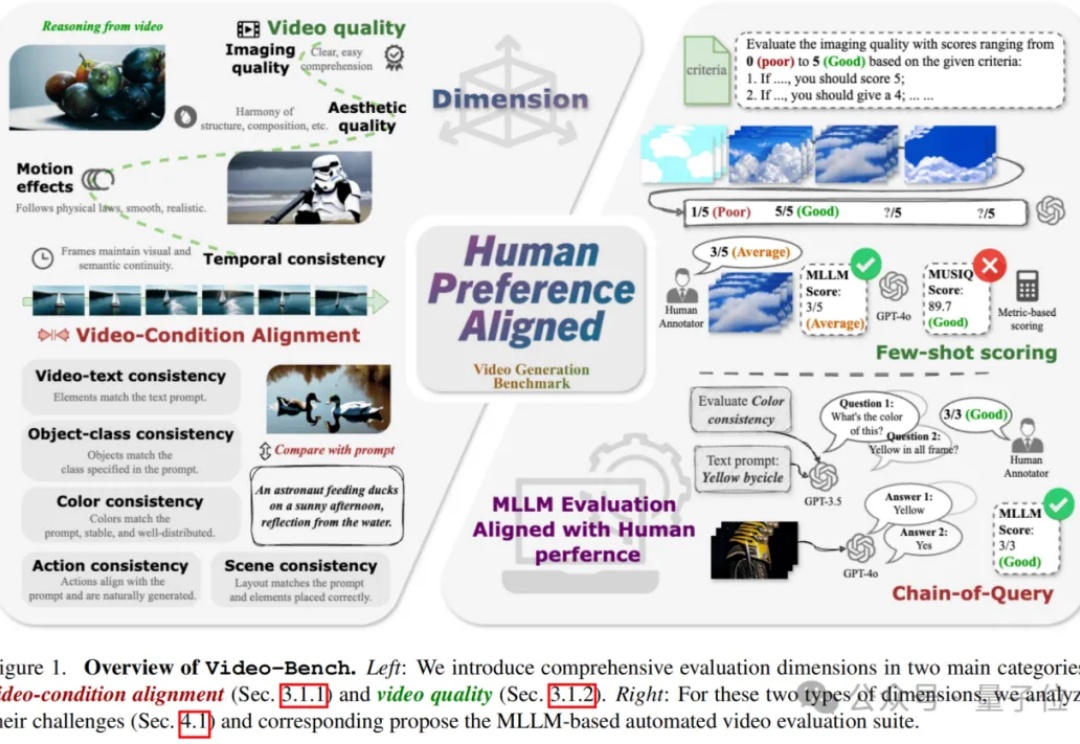
视频生成技术正以前所未有的速度革新着当前的视觉内容创作方式,从电影制作到广告设计,从虚拟现实到社交媒体,高质量且符合人类期望的视频生成模型正变得越来越重要。
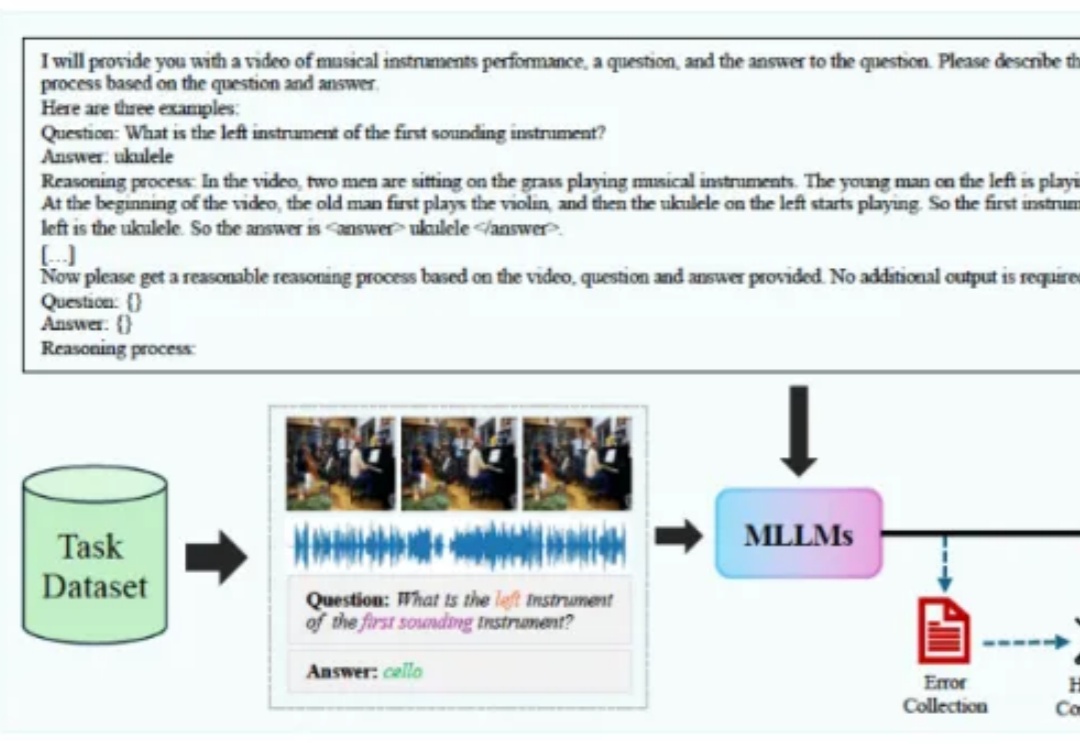
我们人类生活在一个充满视觉和音频信息的世界中,近年来已经有很多工作利用这两个模态的信息来增强模型对视听场景的理解能力,衍生出了多种不同类型的任务,它们分别要求模型具备不同层面的能力。
王劲,香港大学计算机系二年级博士生,导师为罗平老师。研究兴趣包括多模态大模型训练与评测、伪造检测等,有多项工作发表于 ICML、CVPR、ICCV、ECCV 等国际学术会议。

本文第一作者为前阿里巴巴达摩院高级技术专家,现一年级博士研究生满远斌,研究方向为高效多模态大模型推理和生成系统。通信作者为第一作者的导师,UTA 计算机系助理教授尹淼。尹淼博士目前带领 7 人的研究团队,主要研究方向为多模态空间智能系统,致力于通过软件和系统的联合优化设计实现空间人工智能的落地。
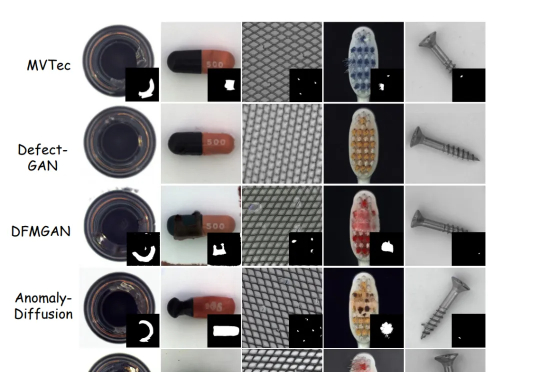
AI模型用于工业异常检测,再次取得新SOTA!

研究者针对 few-shot 图像编辑提出一个新的自回归模型结构 ——InstaManip,并创新性地提出分组自注意力机制(group self-attention),在此任务上取得了优异的效果。