AI能接管实验室了?中国科大最新研究给出真实物理世界的压力测试
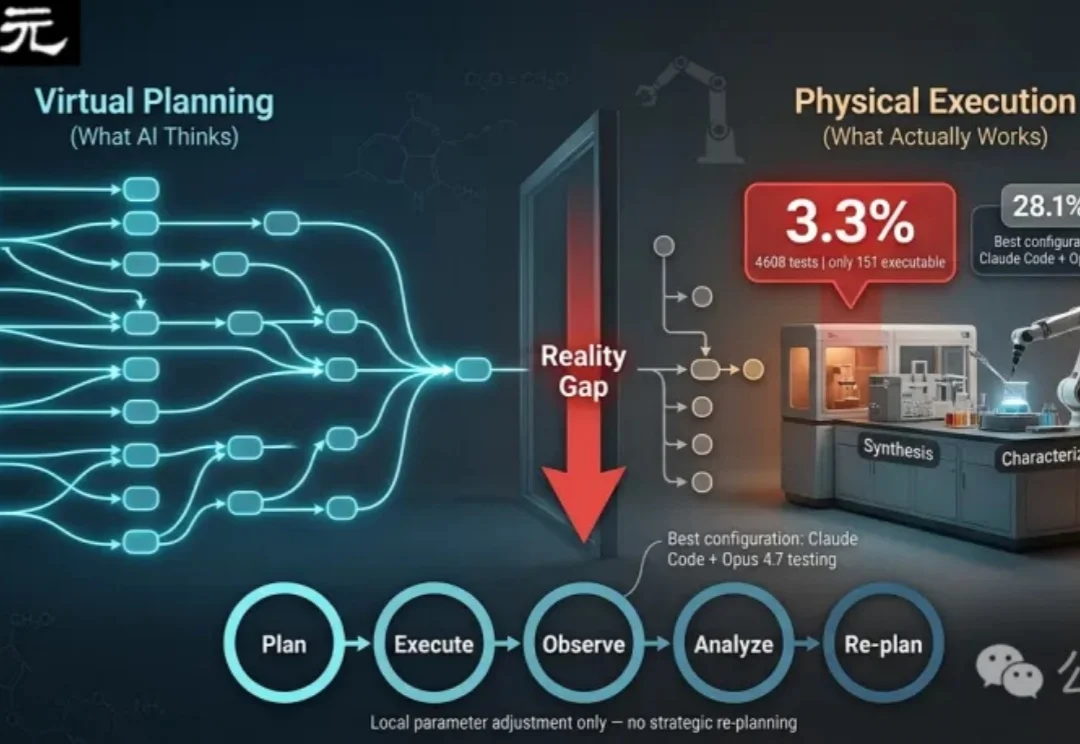
AI能接管实验室了?中国科大最新研究给出真实物理世界的压力测试我们如何判断人工智能是否已经足够聪明,能够从事科学研究,实现端到端的自主科学发现?
来自主题: AI技术研报
9261 点击 2026-08-06 15:41
 搜索
搜索
我们如何判断人工智能是否已经足够聪明,能够从事科学研究,实现端到端的自主科学发现?
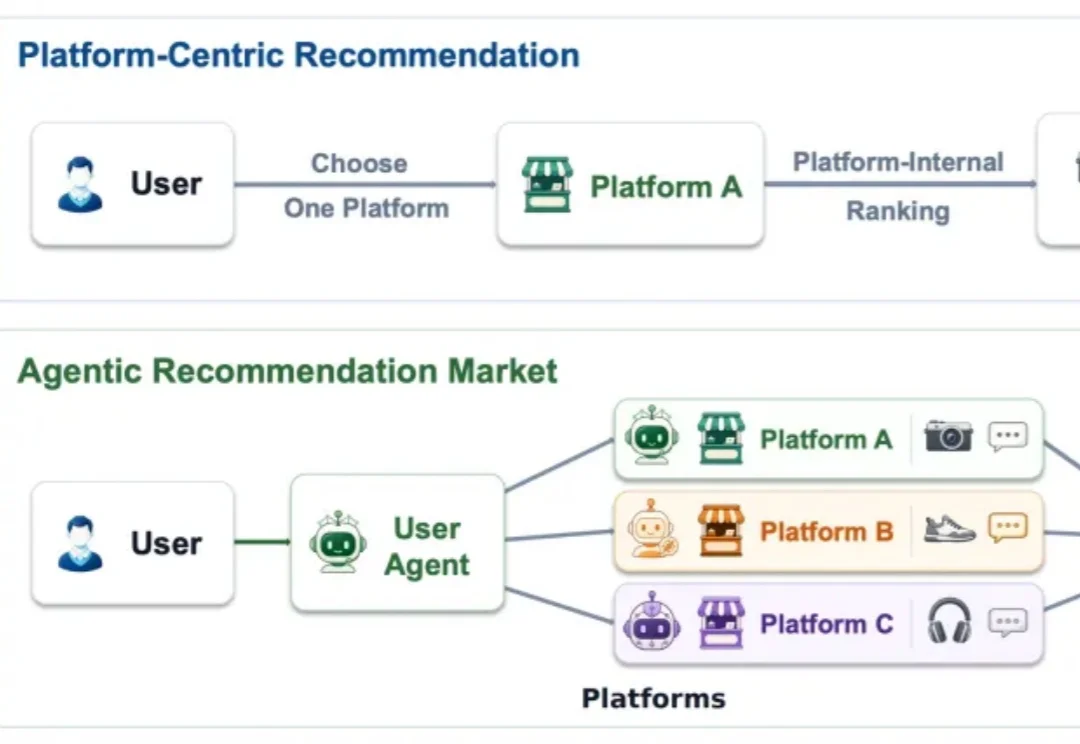
你有没有想过,有一天你买东西,不再需要打开购物软件挨个搜索,而是直接对你的AI助手说一句“我想买一把适合初学者的吉他”,它就能跑遍全网,把最好的几个选项摆在你面前,还附带理由?
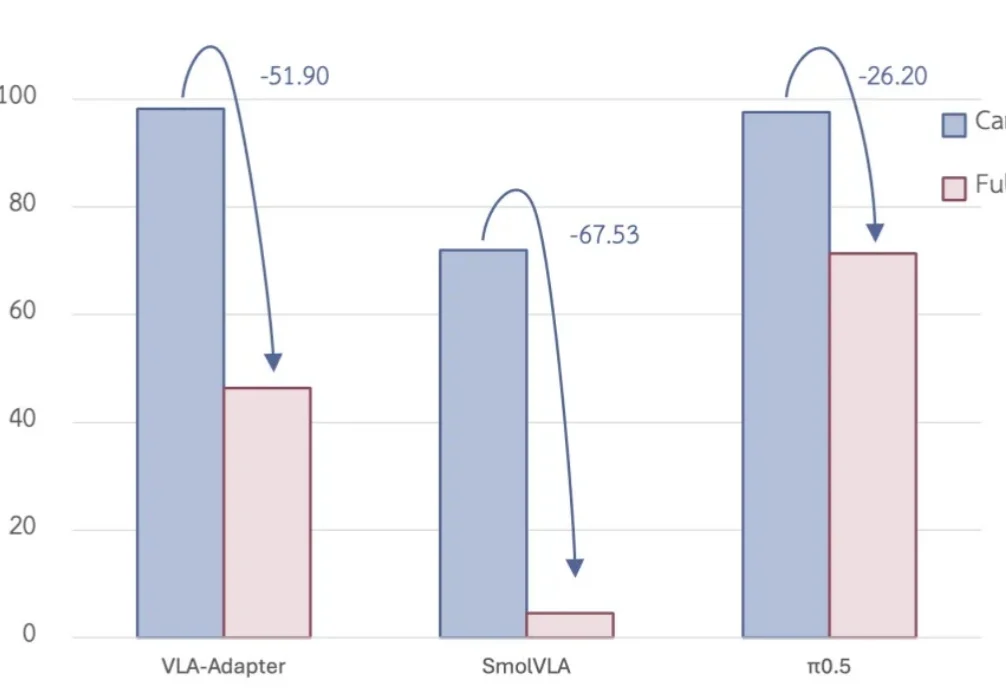
作为具身智能最主流的路线之一,VLA 快速发展的同时也因为其各种问题被诟病。其中最主要的痛点之一便是指令泛化能力。
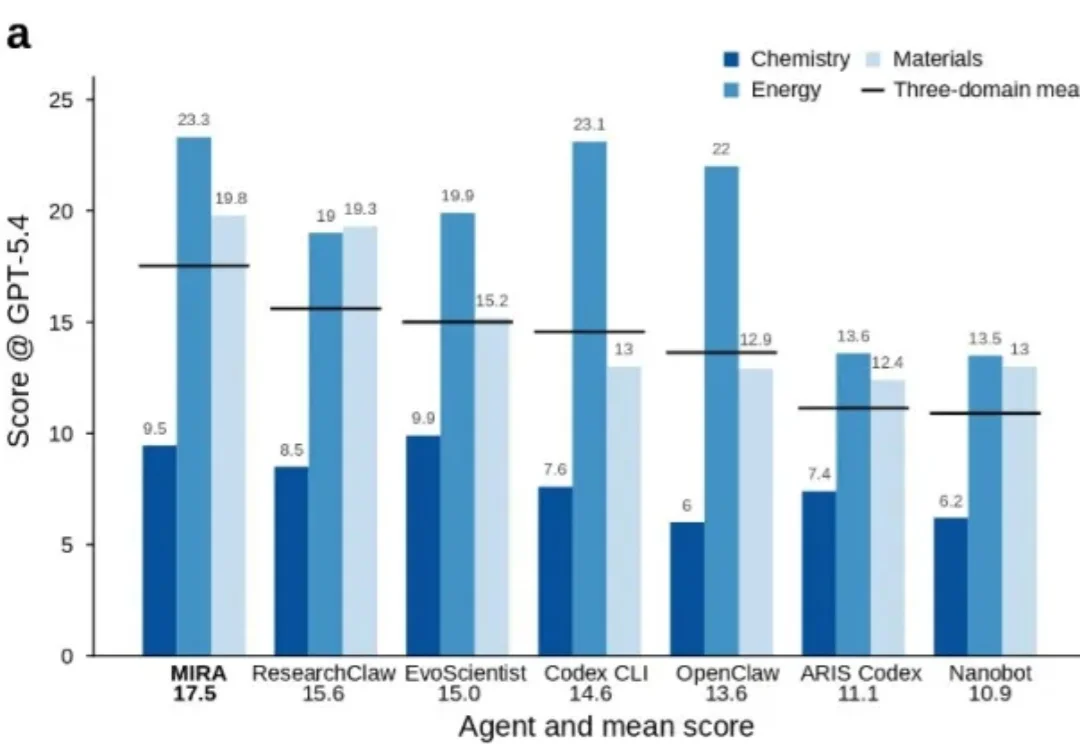
2026 年被业内普遍视作 AI4S(AI for Science)的「智能体元年」。
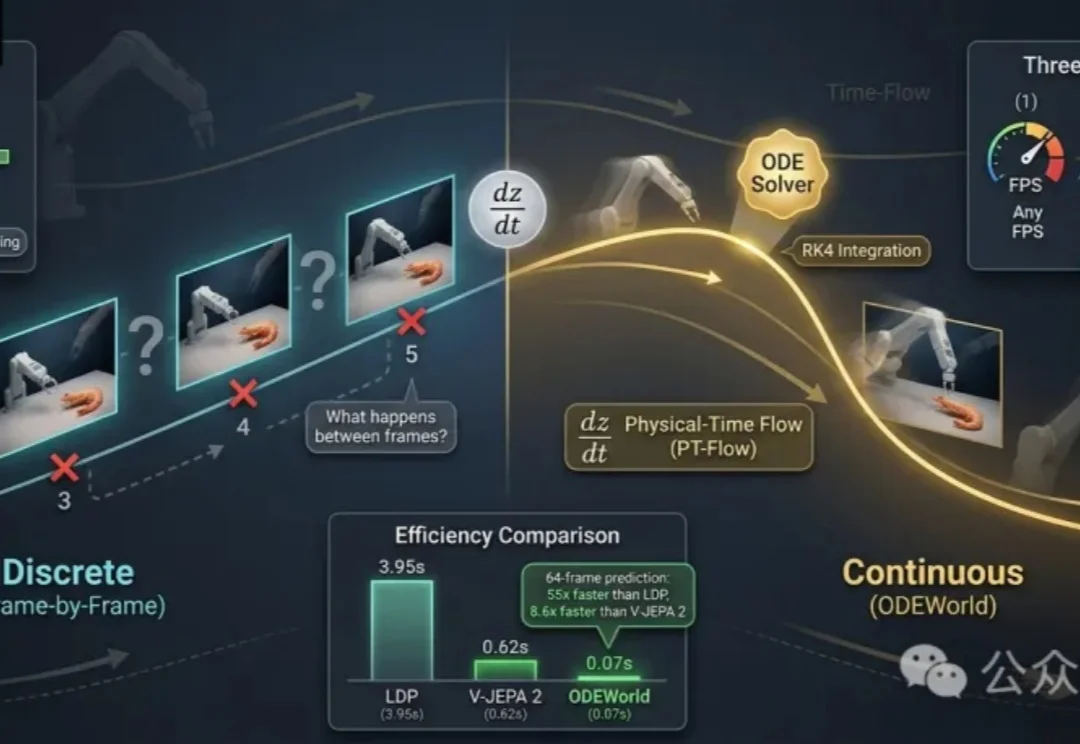
让机器人把一只虾夹起来,再放进锅里。
Transformer 的上限在哪里?这个问题从 2022 年 ChatGPT 问世起,就开始被广泛讨论。

随着 AI 生图能力不断提升,如何让 AI 真正进入创作流程成为新的行业问题。兔展智能基于 UniWorld-Design 视觉 AI 大模型推出 RabbitVis,尝试推动视觉 AI 从图片生成走向可编辑、可交付的创作流程。

从 2D 像素到 3D 场景 Query,影溯正在尝试把三维内容生产推向可规模化调用的新阶段。
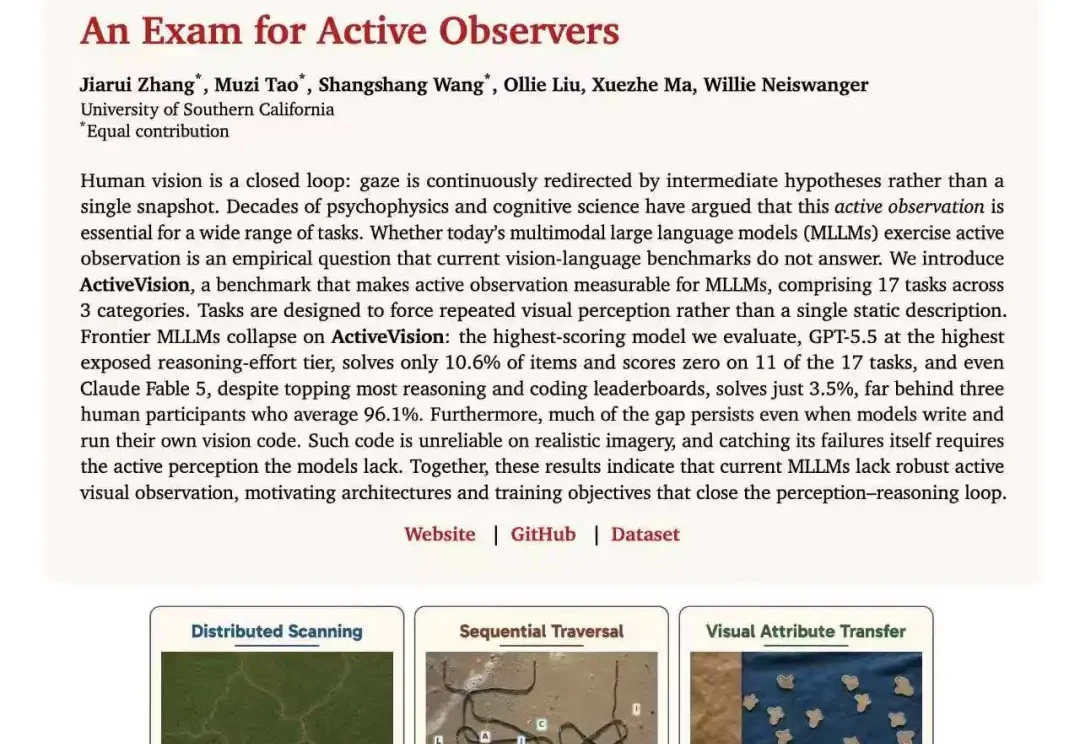
人类看图时,不会先在大脑中拍下一张「截图」,再闭眼推理。思考过程会不断引导我们的目光:找到一个线索,形成一个假设,再回到图像里验证它。

当下,一个逐渐清晰的共识是,具身智能的叙事正由「会不会做一个动作」,转向「能不能在真实世界里稳定完成复杂任务」。尤其是在刚刚过去的 WAIC2026 现场,这一点尤为明显,机器人不再满足于表演式的单动作演示,而是被期待走进产线、仓储和酒店客房,真正「做事」。
通过重写 Python、魔改 WebRTC 握手,GPT-Live 让Agent从单向对话进入「实时交互」时代。
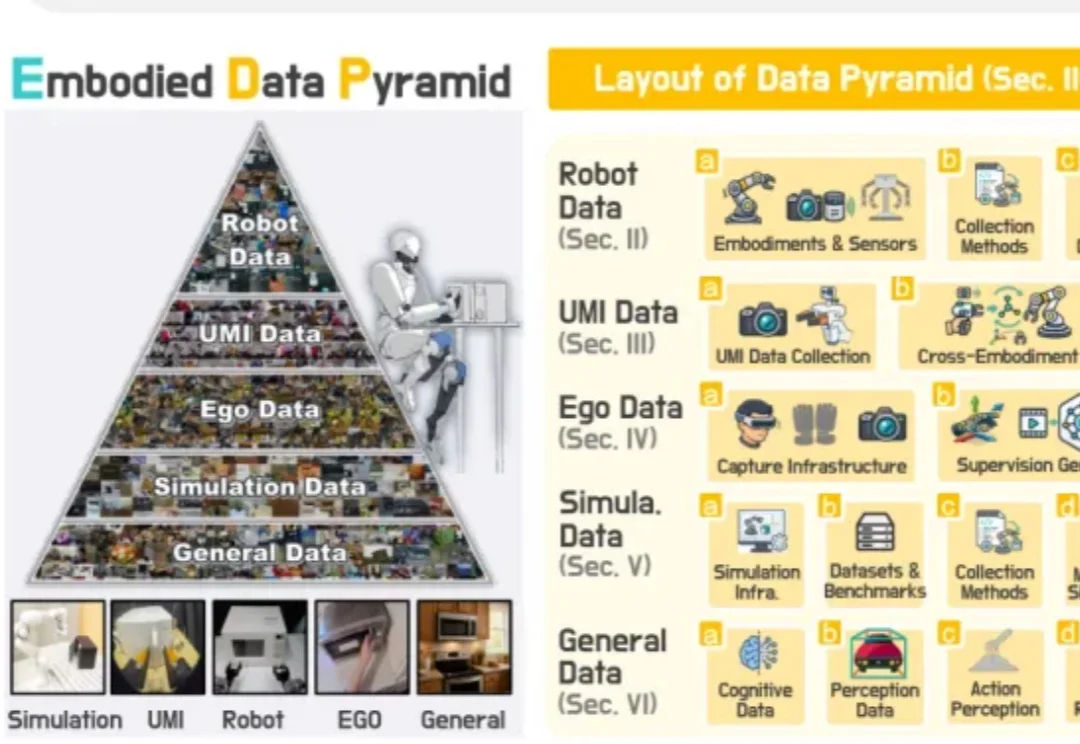
多模态基础模型可以通过互联网规模的图像与语言学习「看」和「说」,但具身智能没有同样的捷径。机器人必须进一步理解物理状态与动力学,判断动作如何改变环境,并在真实世界中执行连续行为;这要求训练数据同时连接观察、状态、动作与物理后果。
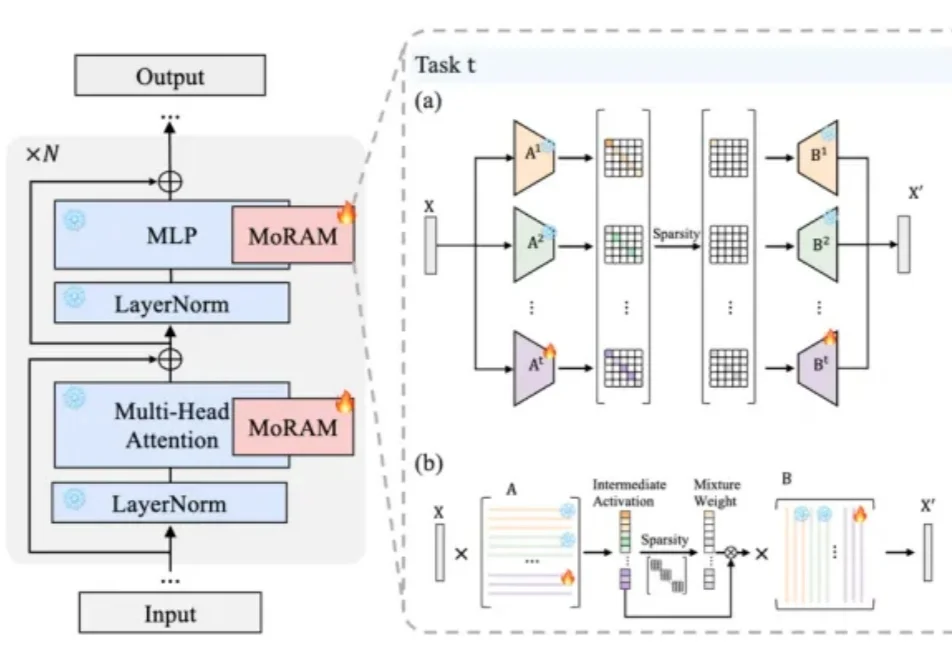
想象一个刚上岗的实习生。教他做A任务,他学得很好;接着教他做B任务,他又学会了——但回过头再让他做A,他却忘得七七八八。

OpenAI宣称下一代AI模型解决了10个世界级难题,其中包括推翻了Connes刚性猜想。

2026年已过去七个月,中国AI创业市场出现了一个值得关注的现象:在世界模型赛道,新成立的公司数量持续攀升,截至8月初已达到23家。这个数字意味着什么?作为对比,2025年全年新成立的世界模型公司是20家,2024年只有10家。2026年用7个月就超过去年全年总量。

过去,LlamaFactory 让每个人都能微调大模型;现在,PenguinHarness 希望让每个人都能构建自进化 Agent。

视觉问答模型的准确率不断提高,但高分未必来自视觉理解 —— 当基准图像与答案已进入训练语料,模型可能只是复现了记忆。浙江大学等团队提出 ReKey:保留原始真实场景,只更新决定答案的那一小块视觉线索,使每轮评测都面向未见过的内容。
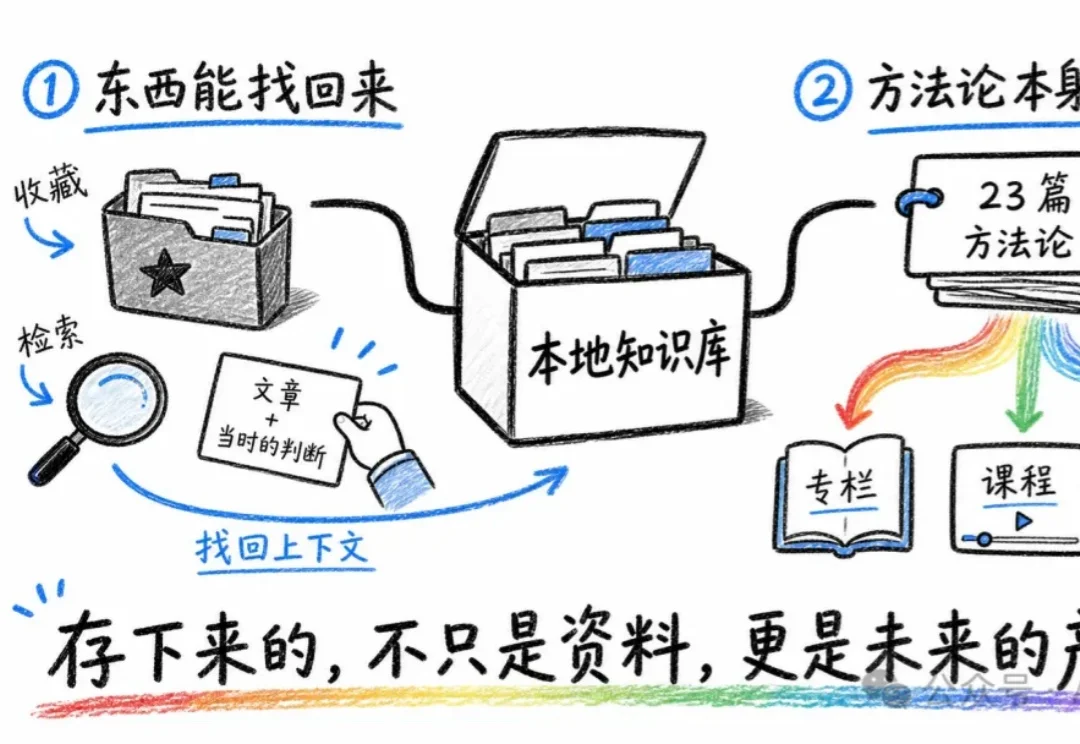
7 月初的时候,我照着 Karpathy 那套 LLM Wiki(简单说就是让 AI 帮你把资料编译成一个能长大的百科)搭了个本地知识库。
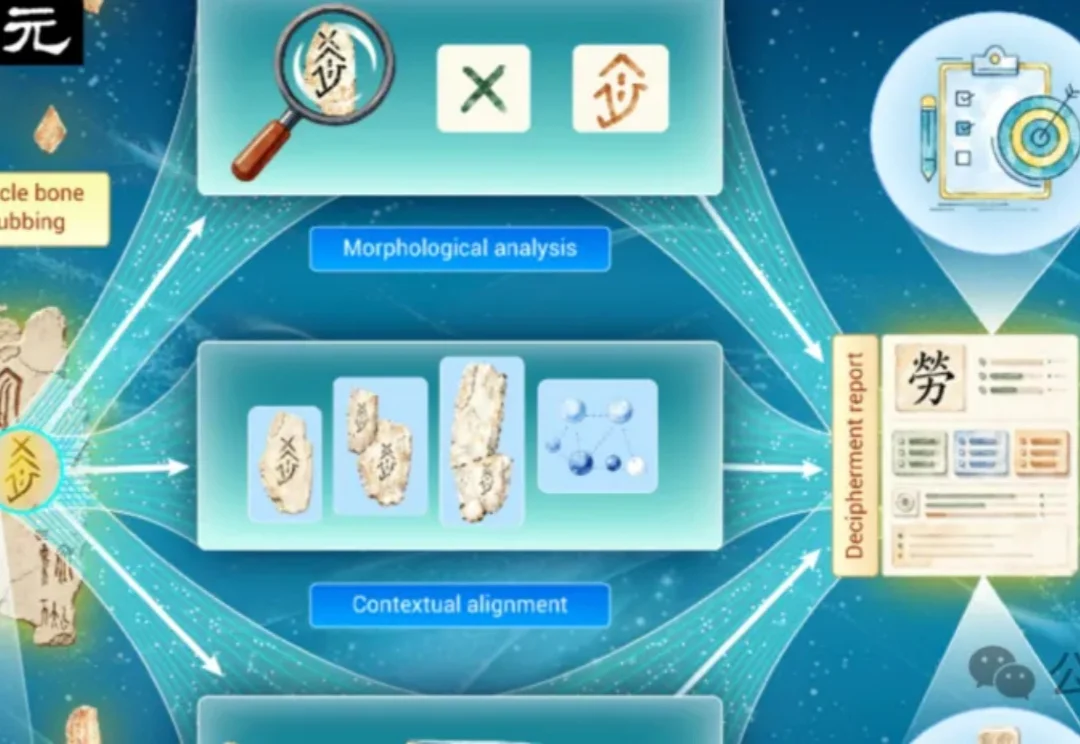
一片龟甲或牛肩胛骨摆在案头,裂纹穿过刻辞,几个字还缺了笔画。

如何从一段视频中获得完整、稳定的 3D 物体?过去,这个问题大致沿着两条路线发展。
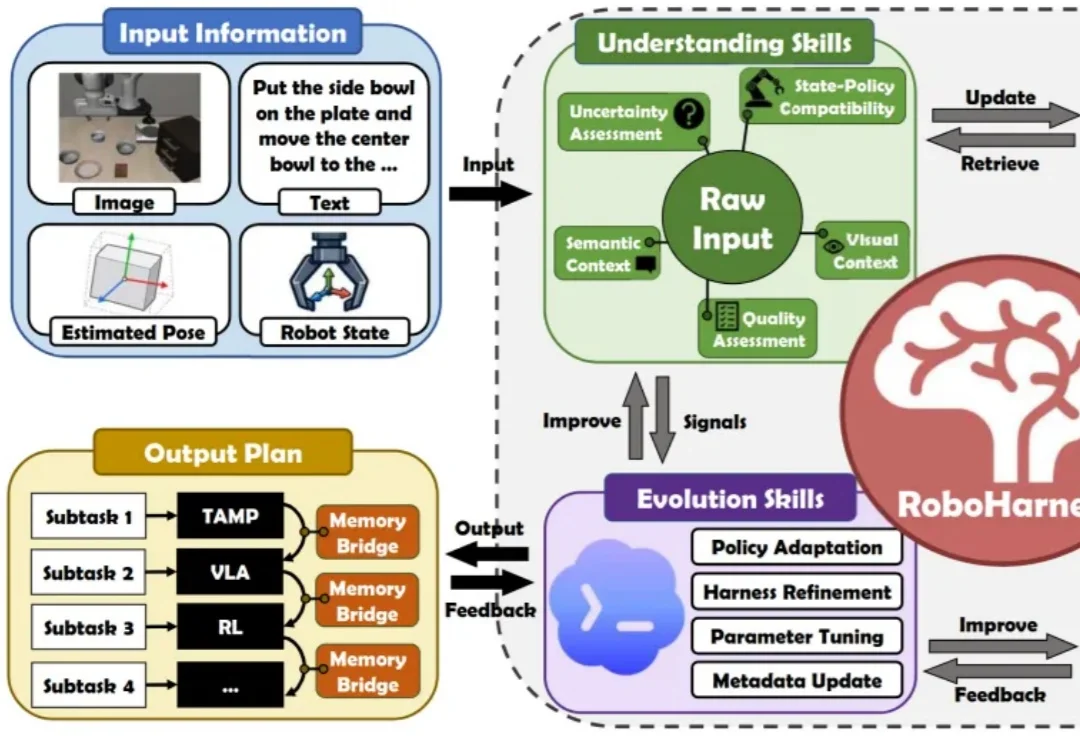
当 VLA、WAM、RL、TAMP、MPC 等机器人控制策略在各自擅长的任务中大放异彩,如何刻画其能力边界,并在正确的时机为不同子任务匹配最合适的策略,正逐渐成为机器人完成复杂长时序任务的关键。
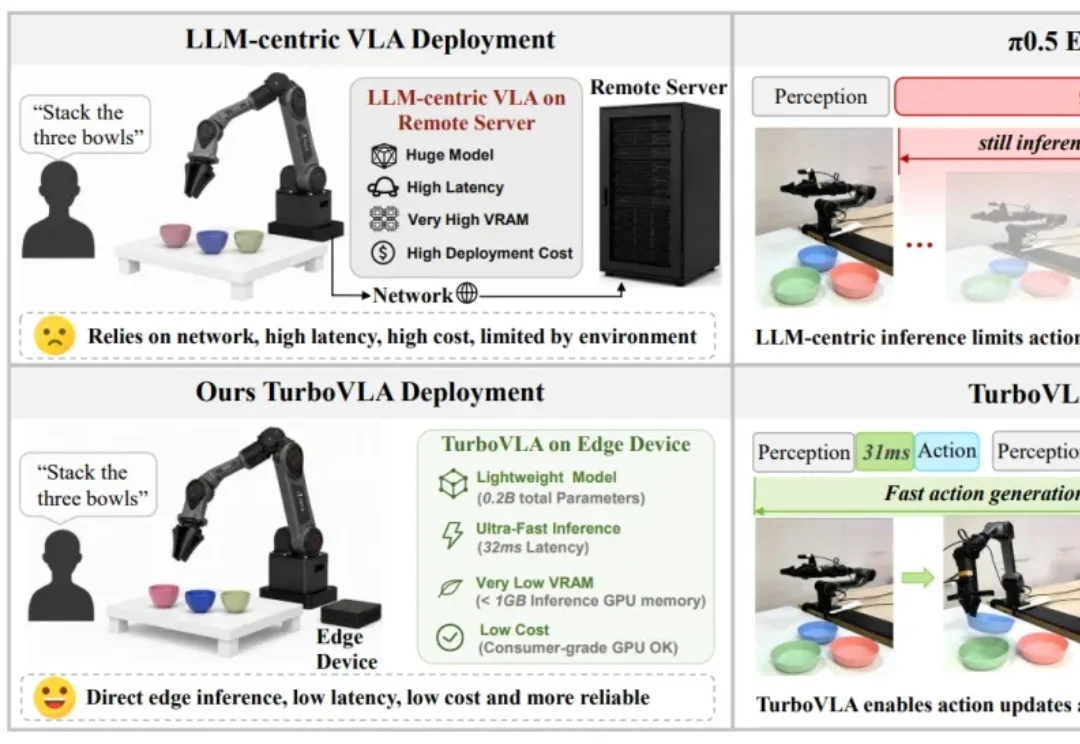
近年来,视觉 — 语言 — 动作模型(Vision-Language-Action Model,VLA)正逐渐成为通用机器人控制的重要技术路线,但当这些模型真正进入高频闭环执行时,一个矛盾越来越突出:模型越来越大、语义能力越来越强,动作更新却未必足够快。
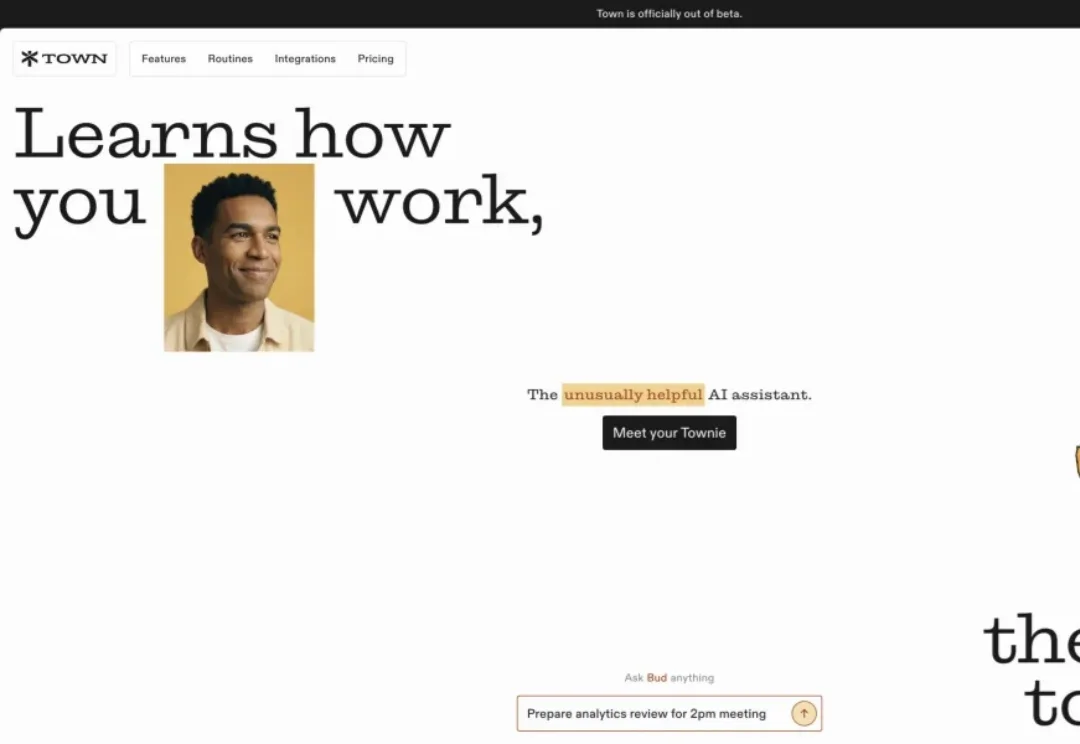
最近,一款叫Town的AI助手,成了硅谷创投圈最火的AI产品之一。
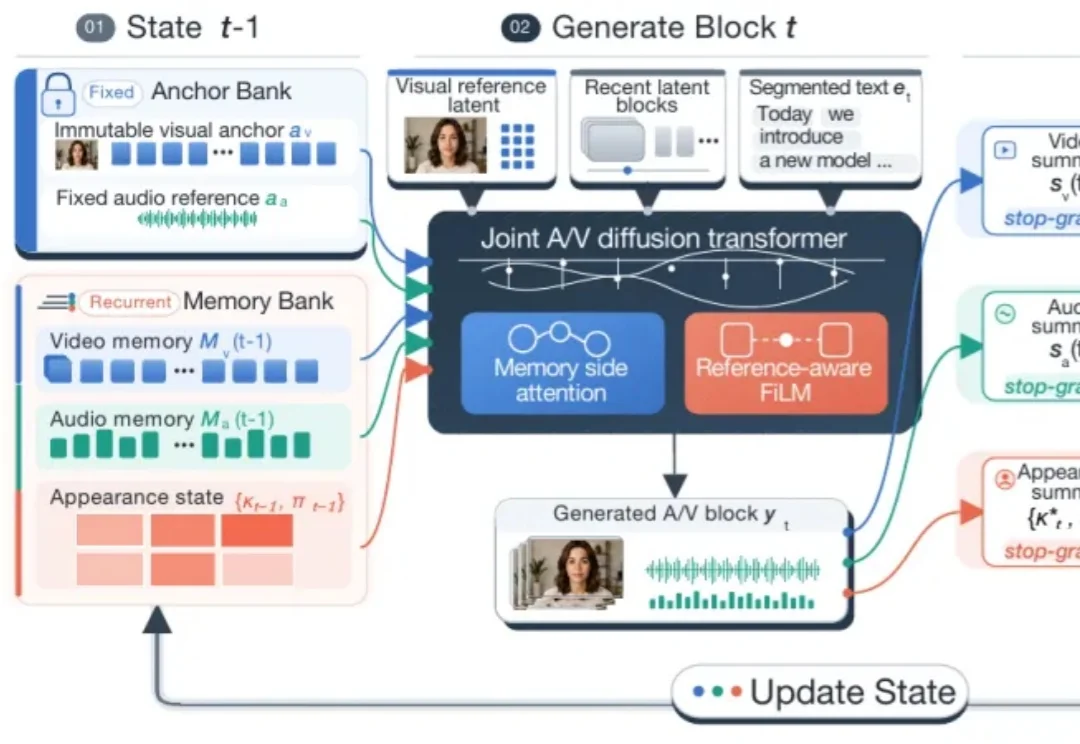
当数字人视频从数秒扩展到数分钟,生成系统面对的核心问题不再只是单帧质量,而是递归生成中的误差累积。
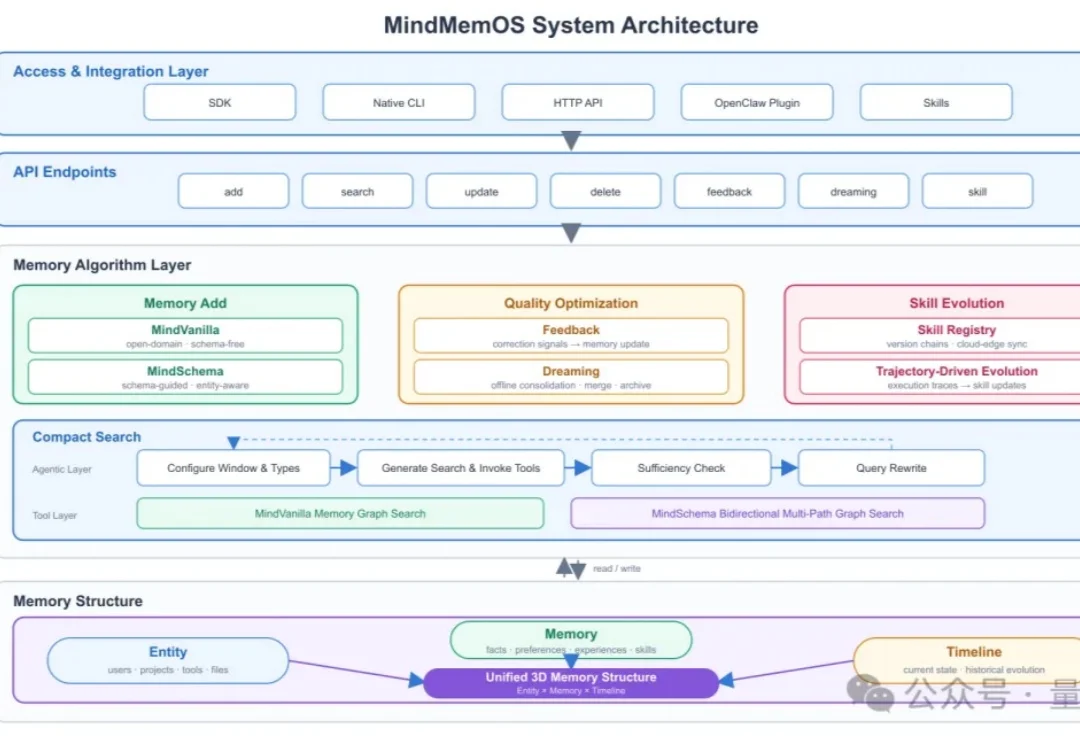
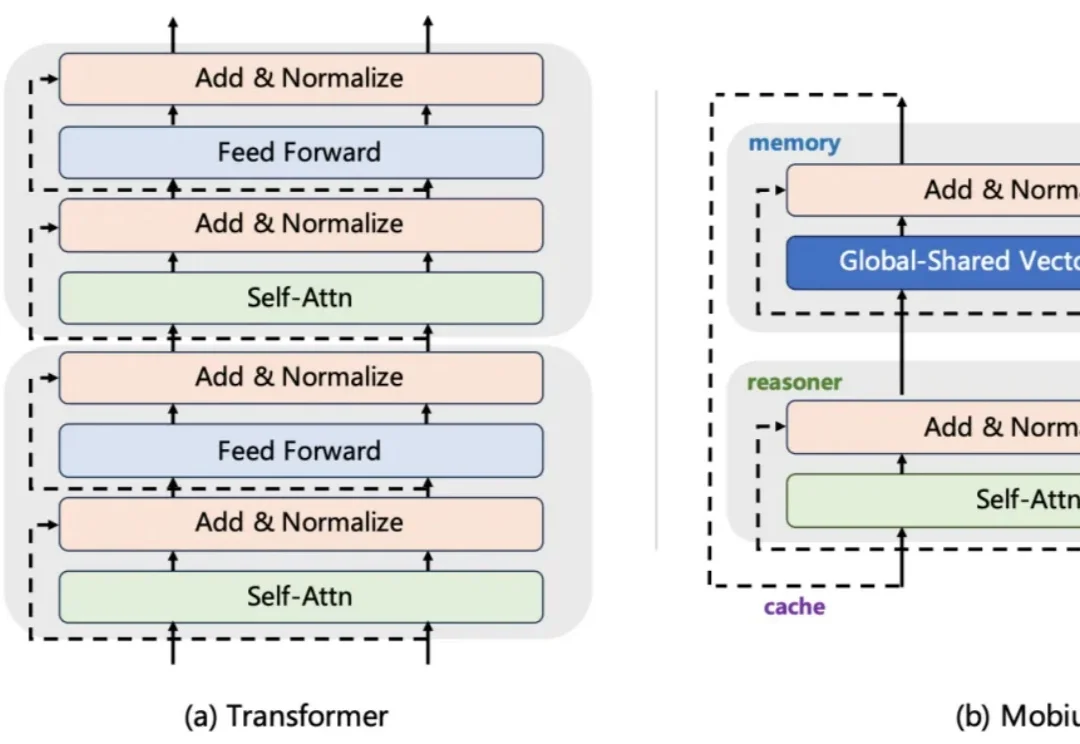
Agent的能力越来越强,但使用体验仍有一个尴尬之处: 每换一个Agent甚至换一个session,就像换了一个完全不了解你的新员工。
近五分钟“肌肉记忆”,推理延迟不随历史增长
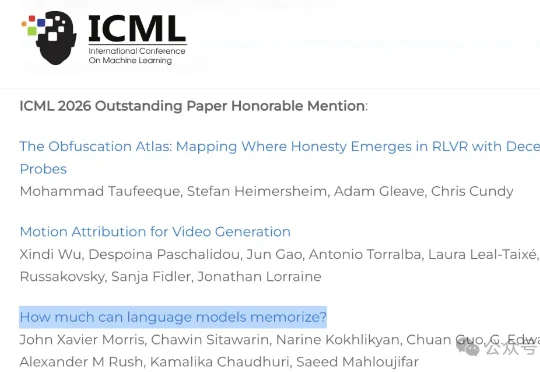
一个80亿参数的大模型,一口气吞下15万亿token的训练数据,堆到硬盘上差不多7TB。可它真正「背」得下来的,少得可怜:每个参数只装得下3.6 bit。一个英文字母8 bit,连半个都填不满。
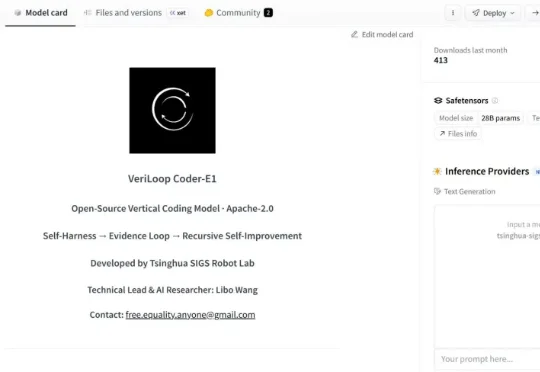
近日,由清华大学深圳国际研究生院智能机器人实验室刘厚德教授领衔、王立博博士后担任 AI 首席研究员的大模型团队,正式发布了 VeriLoop Coder-E1—— 一款基于 Qwen3.6-27B 构建、面向仓库级代码修复与智能体式软件工程任务的开源垂类代码模型。
最近,一篇来自 UIUC 与哈佛大学的论文,试图把这块最后的拼图补上。作者给这个新范式起了个名字,叫 Explorative Modeling(探索式建模),模型简称 XM。它的想法简单到近乎朴素,却指向一个大胆的结论:生成模型除了参数和数据,其实还有第三根可以放大的轴。
浙江大学、清华大学智能产业研究院、影溯 InSpatio、RoboParty Lab 等团队提出的 INTACT(INtent-To-ACTion),一种基于端到端 JEPA 的无搜索世界模型控制方法,试图改变这一范式:直接利用离线轨迹中已有的状态、动作与未来结果,将运动意图转化为动作模型可以读取的语义接口,使模型无需搜索候选动作序列,就能直接生成动作计划