视觉大模型迎来“o1时刻”:腾讯混元提出SOAR,让AI在生成中学会自我纠偏
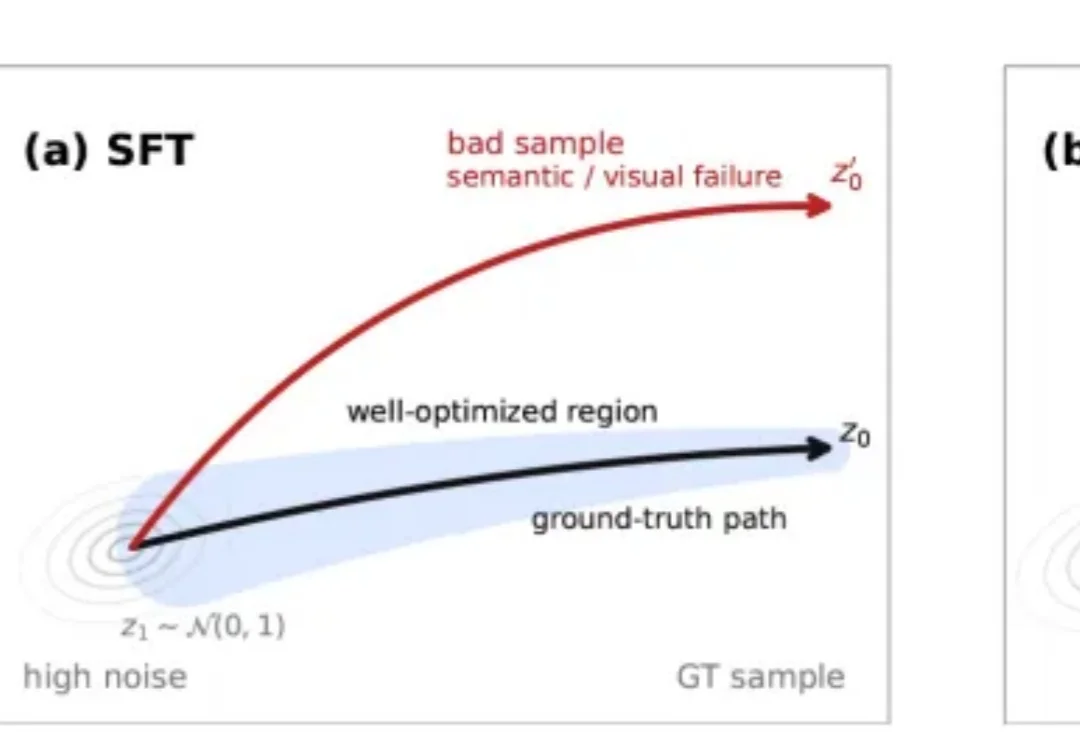
视觉大模型迎来“o1时刻”:腾讯混元提出SOAR,让AI在生成中学会自我纠偏近日,腾讯混元团队提出HY-SOAR (Self-Correction for Optimal Alignment and Refinement),一种面向扩散模型和流匹配模型的数据驱动后训练方法。
来自主题: AI技术研报
8235 点击 2026-04-23 14:44
 搜索
搜索
近日,腾讯混元团队提出HY-SOAR (Self-Correction for Optimal Alignment and Refinement),一种面向扩散模型和流匹配模型的数据驱动后训练方法。

每月5美刀,就能在你家服务器里养个AI打工人,无缝接入Telegram、Discord、Slack、飞书、企业微信等平台。它不仅能帮你干活,还会自己攒技能并反哺训练。网友直呼:换掉OpenClaw太爽了!
通用世界模型评测榜单 WorldScore 登顶、建立具身世界模型评测榜单 WorldArena 、发布通用世界模型 WorldScape 、发布世界-动作模型 WorldScape Policy,这家低调的世界模型创业公司 Manifold AI(流形空间)近期走出隐身模式频频出手,开始领跑世界-动作模型具身新路线。

Anthropic 的 Claude Code 源代码泄漏事件余波未平,另一场事故又接踵而至了。
OpenClaw 又开始日更了:Skills 安装终于不用自己猜缺什么了,系统会手把手告诉你下一步;控制台界面也大改,找东西不再像在迷宫里转。另外堵上了一个文件访问的安全漏洞,Telegram、Discord、WhatsApp 的频道 bug 也扫了一轮。

刚刚,五角大楼一份绝密备忘录曝光,Palantir的AI系统正式确立为美军的「记录项目」(Program of Record)。也就是说,Palantir AI,正式成为美军跨军种的核心「操作系统」。人类的未来战争,将很大程度上由AI决定了!
Claude Code又上杀手锏!新增Channels功能,Telegram/Discord直连编程会话,手机直接遥控AI写代码。
近日,影溯正式发布并开源世界模型 InSpatio-World,综合性能优异,在李飞飞牵头的权威世界模型榜单 WorldScore-Dynamic 中,力压其他实时 / 交互级推理速度的世界模型。它彻底摒弃了烧钱低效的纯 2D 视频路径,凭借更具第一性原理的 3D 空间架构,带来了可实时交互的动态世界。

19日下午,此芯科技以「智启未来 芯动全球」为主题,在深圳举办OpenClaw CPU系列产品及方案矩阵发布会,正式推出全球首款OpenClaw专属CPU——CIX ClawCore螯芯系列。

在休斯顿南边那片化工厂和炼油厂密布的工业带,Cory LaChance 每天打交道的东西是管道等轴测图(piping isometric drawing)。这类图纸记录了工业管道系统中每一根管子的走向、每一个焊缝的位置、每一种材料的规格。