

具身机器人征服1万伏高压线!-10℃严寒、13米高空全天候作业零事故
具身机器人征服1万伏高压线!-10℃严寒、13米高空全天候作业零事故1万伏的高压配网线路上,一台亮黄色的具身智能机器人正在替人类干活。
来自主题: AI资讯
7789 点击 2025-11-06 10:33
1万伏的高压配网线路上,一台亮黄色的具身智能机器人正在替人类干活。
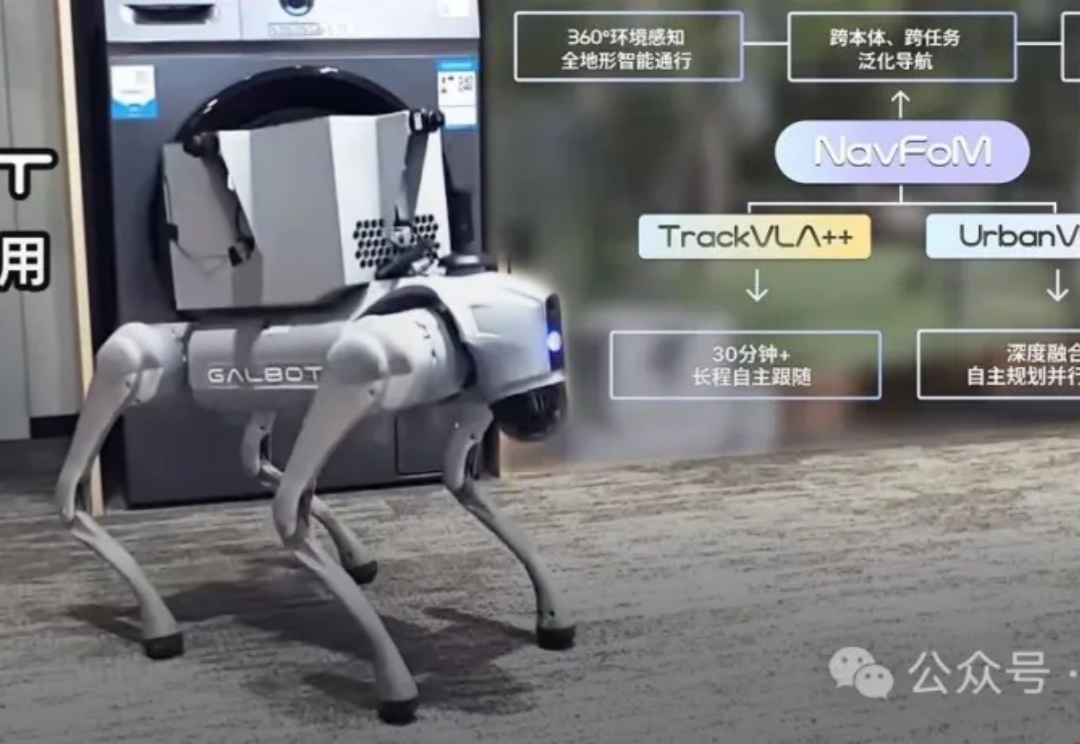
银河通用联合多所大学发布了全球首个跨本体全域环视导航基座大模型NavFoM,让机器人能自己找路,而不再依赖遥控,从而推动具身智能向规模化商业落地演进。
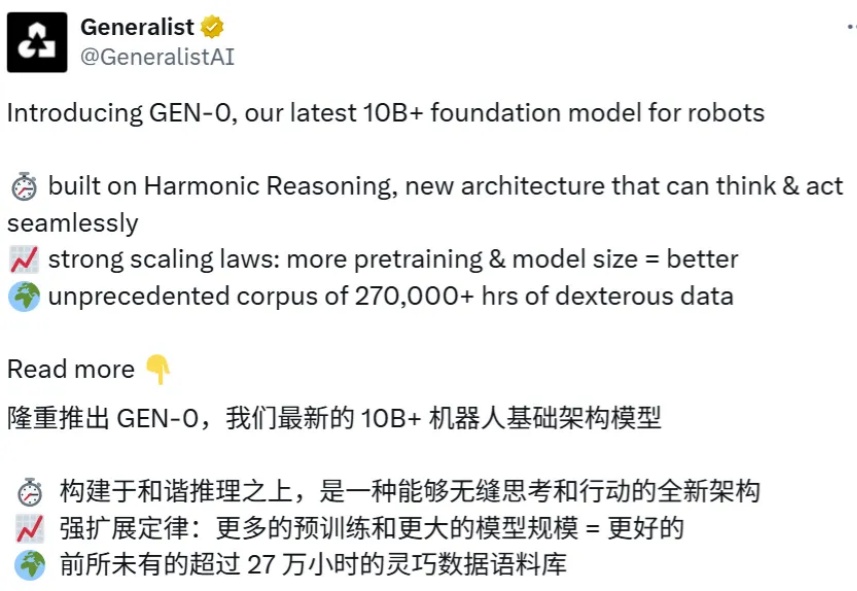
当前机器人领域,基础模型主要基于「视觉-语言预训练」,这样可将现有大型多模态模型的语义泛化优势迁移过来。但是,机器人的智能确实能随着算力和数据的增加而持续提升吗?我们能预测这种提升吗?
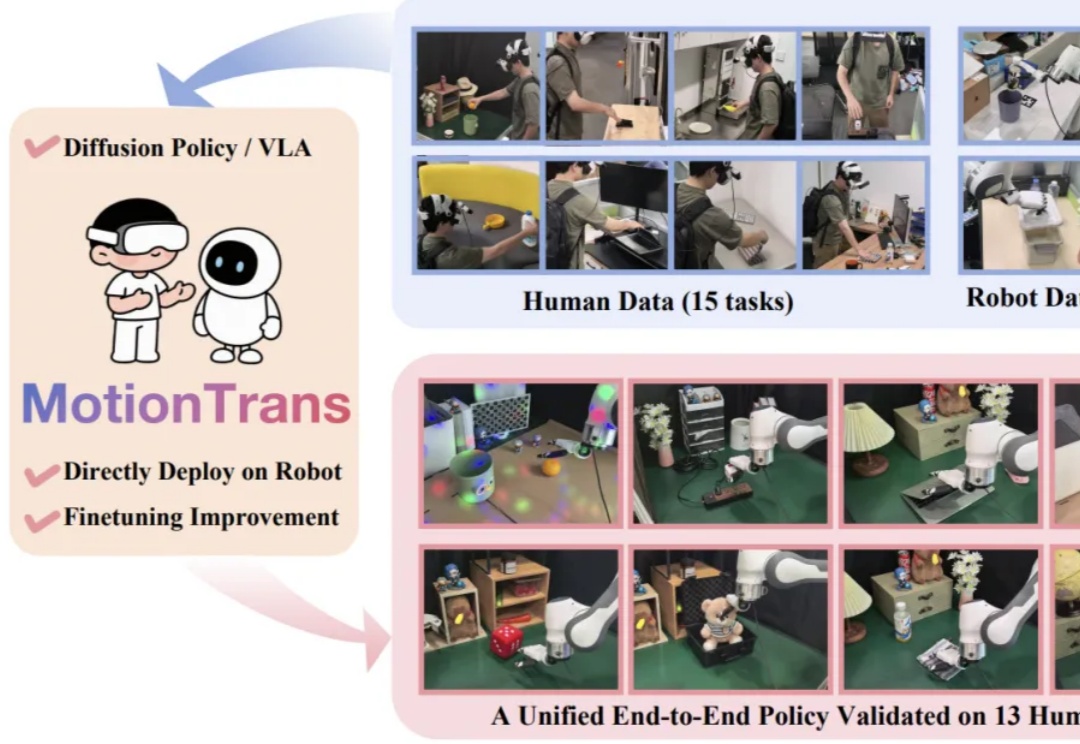
近期,Google DeepMind 发布新一代具身大模型 Gemini Robotics 1.5,其核心亮点之一便是被称为 Motion Transfer Mechanism(MT)的端到端动作迁移算法 —— 无需重新训练,即可把不同形态机器人的技能「搬」到自己身上。不过,官方技术报告对此仅一笔带过,细节成谜。

擎天柱靓丽演示背后,是近百号员工每日8小时,疯狂重复固定动作,擦桌子、扮大猩猩等,他们正用体力「喂饱」擎天柱。
当机器人也开始找人代班,当一个人类操作一个机器人「入侵」你的生活,你会允许吗?

具身智能赛道的想象力,远比眼前的机器人要辽阔。
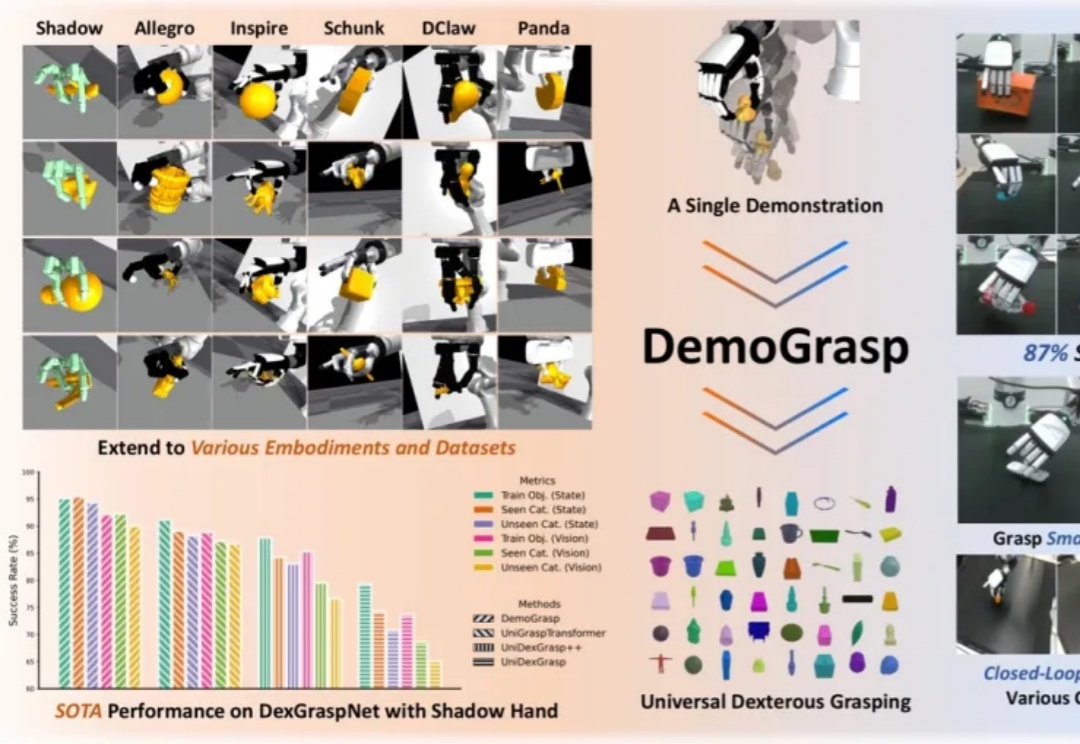
在灵巧手通用抓取的研究中,由于动作空间维度高、任务具有长程探索特征且涉及多样化物体,传统强化学习(RL)面临探索效率低、奖励函数及训练过程设计复杂等挑战。
全球首款开卖的家务人形机器人来了!
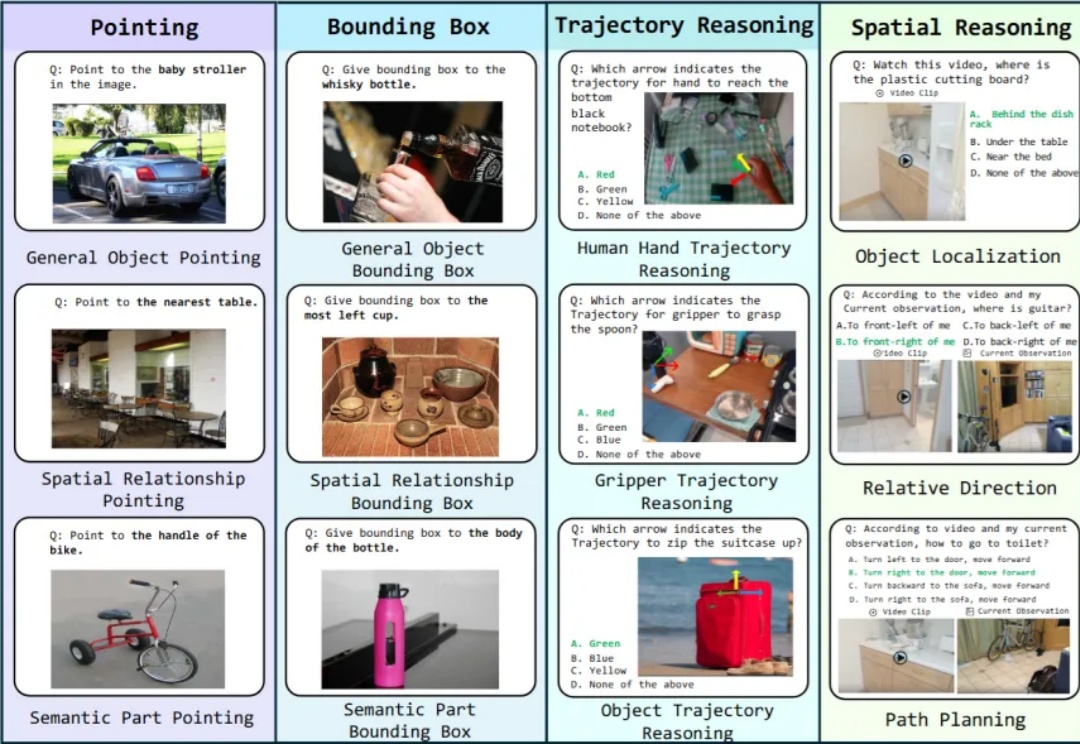
具身智能是近年来非常火概念。一个智能体(比如人)能够在环境中完成感知、理解与决策的闭环,并通过环境反馈不断进入新一轮循环,直至任务完成。这一过程往往依赖多种技能,涵盖了底层视觉对齐,空间感知,到上层决策的不同能力,这些能力便是广义上的具身智能。