
90天成功路测90城!C轮融了10.5亿美元的英国具身智能自动驾驶公司最新进展
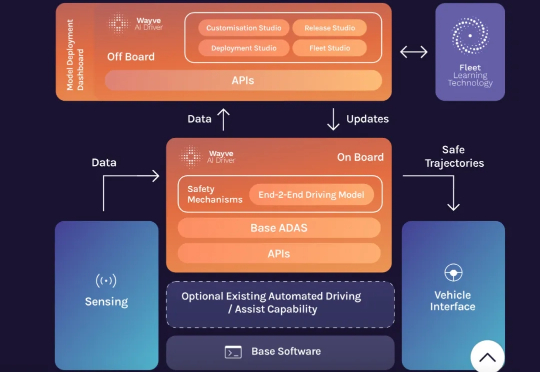
90天成功路测90城!C轮融了10.5亿美元的英国具身智能自动驾驶公司最新进展2024年5月,英国自动驾驶初创公司Wayve宣布完成10.5亿美元(约合人民币75亿元)的C轮融资,这不仅成为2024年全球自动驾驶领域最大规模的单笔融资,同时也是欧洲人工智能公司有史以来获得的最大投资之一。
来自主题: AI资讯
9223 点击 2025-08-05 13:51
2024年5月,英国自动驾驶初创公司Wayve宣布完成10.5亿美元(约合人民币75亿元)的C轮融资,这不仅成为2024年全球自动驾驶领域最大规模的单笔融资,同时也是欧洲人工智能公司有史以来获得的最大投资之一。

具身智能加速演进,硬件本体持续刷新边界,具身模型也在数据与交互中渐现雏形。而在系统层,通用协同的操作底座依然缺位。

外卖平台补贴大战结束,美团、淘宝、京东转而聚焦AI投资,尤其在具身智能领域(机器人)。巨头面临硬件自研困境,多通过投资机器人公司协同创新,而非内部孵化。京东侧重提升物流仓储效率,美团覆盖本地生活场景,阿里专注大模型与智能中枢。这源于外卖市场饱和与低估值压力,巨头寻求新技术突破以创造增量。

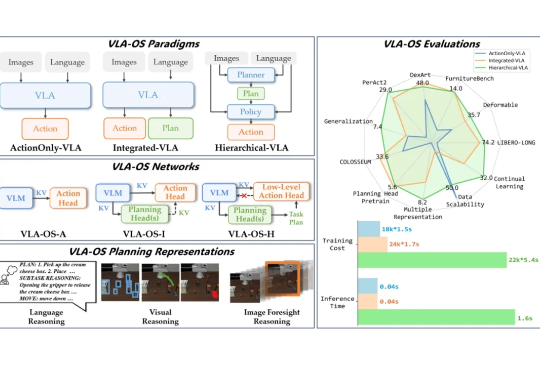
尽管当前的机器人视觉语言操作模型(VLA)展现出一定的泛化能力,但其操作模式仍以准静态的抓取与放置(pick-and-place)为主。相比之下,人类在操作物体时常常采用推动、翻转等更加灵活的方式。若机器人仅掌握抓取,将难以应对现实环境中的复杂任务。
还有人没被《大展鸿图》洗脑吗? 反正今天一睁眼,朋友圈里就有人形机器人“别墅里面唱K”开始刷屏,给我看得一愣一愣的——
为什么机器人能听懂指令却做不对动作?语言大模型指挥机器人,真的是最优解吗?端到端的范式到底是不是通向 AGI 的唯一道路?这些问题背后,藏着机器智能的未来密码。
打通机器人智能化的关键:眼+脑+手。

如今的具身智能,早已爆红AI圈。数据瓶颈、难以多场景泛化等难题,一直困扰着业界的玩家们。就在WAIC上,全新具身智能平台「悟能」登场了。它以世界模型为引擎,能为机器人提供强大感知、导航、多模态交互能力。

在 7 月 26 日召开的 WAIC 世界人工智能大会上,AI Agent、具身智能被推上了 C 位:从行业论坛到展台

WAIC大会上,这个机器人凭惊艳实力引起了层层围观!叠衣服、分拣物品、听指令取货,他们研发的Mech-GPT多模态大模型和「眼脑手」系统,让机器人的高难度操作性能暴增。现在,这家公司已经成为市占率连续五年的行业冠军了。