

不是CG?没加速?这个国产机器人跳「斧头帮」舞火了,网友:流畅到不像真的
不是CG?没加速?这个国产机器人跳「斧头帮」舞火了,网友:流畅到不像真的灵活到像 CG,官方却说是一倍速实拍,国产机器人又整活了。
来自主题: AI资讯
8919 点击 2025-03-17 16:17
灵活到像 CG,官方却说是一倍速实拍,国产机器人又整活了。

36氪获悉,近日人形机器人公司松延动力北京科技有限公司(以下简称「松延动力」)完成连续两轮过亿元A轮及A+轮融资。A+轮由彬复领投,华强资本跟投;A轮投资方包括神骐资本、北京未来科学城基金、天启资本、泽然资本、教育科技集团战略方等机构。

国产人形机器人,又上大分了。
跑得快、长得可爱、能爬山,机器狗比真狗品种还要五花八门。
现如今机器人又是跑步又是后空翻,但到底什么时候能做上家务给人类养养老?
前段时间,幻方科技、DeepSeek 创始人梁文锋亲自挂名的一篇论文传遍了全球互联网。

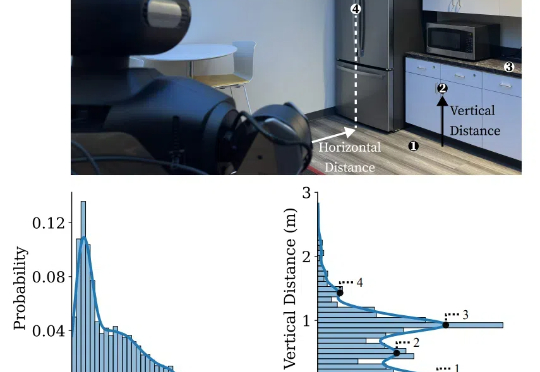
Magma是一个新型多模态基础模型,能够理解和执行多模态任务,适用于数字和物理环境:通过标记集合(SoM)和标记轨迹(ToM)技术,将视觉语言数据转化为可操作任务,显著提升了空间智能和任务泛化能力。
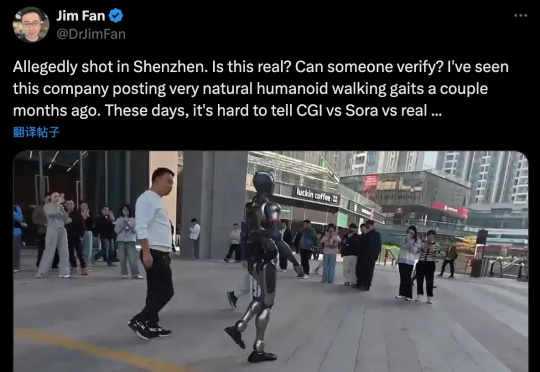
国产机器人,再次惊呆了歪果仁。这便是深圳众擎机器人最新发布的视频。视频中的机器人名叫PM01,身高1.38米,体重约40公斤,全身24个自由度。可以看出,不论是起跑、跑步过程以及停跑,各个关节的协调几乎是没有了“机器人味儿”。

刚填完坑就又埋下“惊喜预告”??
一贯匆匆的人群罕见地汇聚在了一起,用手机、相机层层包围着一个正在独立行走的人形机器人,不断有人上前靠近打卡。稍后,这个来自深圳当地具身智能企业“众擎”的机器人,凭借灵活自然的行动,让相关视频在社交平台上广为流传,甚至引得英伟达工程师在X平台上感叹,“这是真的吗,还是Sora或者什么生成的?”