750城市+5000小时第一人称视频,上海AI Lab开源面向世界探索高质量视频数据集
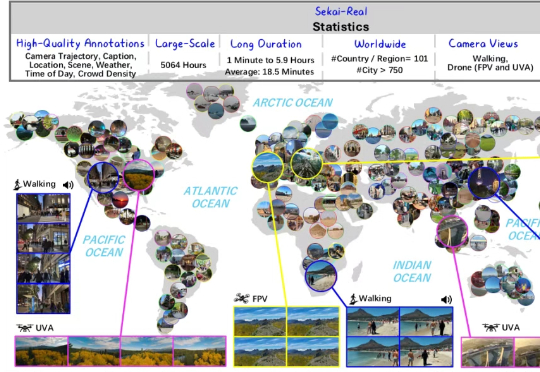
750城市+5000小时第一人称视频,上海AI Lab开源面向世界探索高质量视频数据集现在,国内研究机构就从数据基石的角度出发,拿出了还原真实动态世界的新进展:上海人工智能实验室、北京理工大学、上海创智学院、东京大学等机构聚焦世界生成的第一步——世界探索,联合推出一个持续迭代的高质量视频数据集项目——Sekai(日语意为“世界”),服务于交互式视频生成、视觉导航、视频理解等任务,旨在利用图像、文本或视频构建一个动态且真实的世界,可供用户不受限制进行交互探索。
来自主题: AI技术研报
8462 点击 2025-07-07 11:22