硅基美女建模脸火了,对视 3 秒,我再也没法把它当机器人
硅基美女建模脸火了,对视 3 秒,我再也没法把它当机器人「人形机器人如果有最终形态,那一定会是有头有脸,你觉得呢?」
来自主题: AI资讯
10766 点击 2026-03-26 16:51
 搜索
搜索
「人形机器人如果有最终形态,那一定会是有头有脸,你觉得呢?」

从「被动感知」到「主动预测」,首个视触觉世界模型让机器人真正学会「理解接触」。

想象一下这样的生活片段:你拿起手机 30 秒,屏幕立刻跳出提醒,“当前心率 78,压力中等,建议深呼吸”;家里的智能摄像头静静看着午睡的宝宝,突然通过 App 提醒你:“宝宝心率偏快,呼吸略显急促,建议进屋查看”;养老院里,巡检机器人通过一次擦身而过的对视,便能感知到老人今天情绪低落,且血氧饱和度略低于往常......
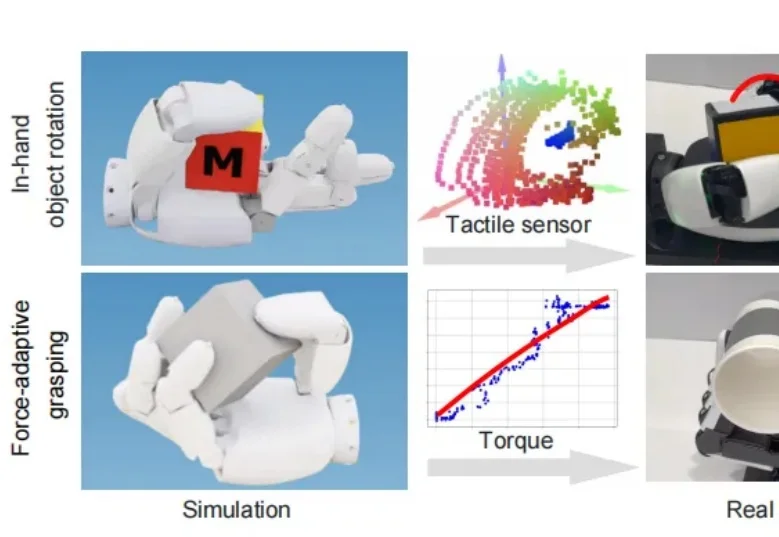
实现具备人类水平的灵巧操作能力,是机器人学领域长期以来的核心挑战之一。尽管多指灵巧手在硬件上具备了类似人类的潜力,但由于接触丰富的物理特性和非理想的驱动机制,训练能够直接部署在真实硬件上的控制策略仍然非常困难。
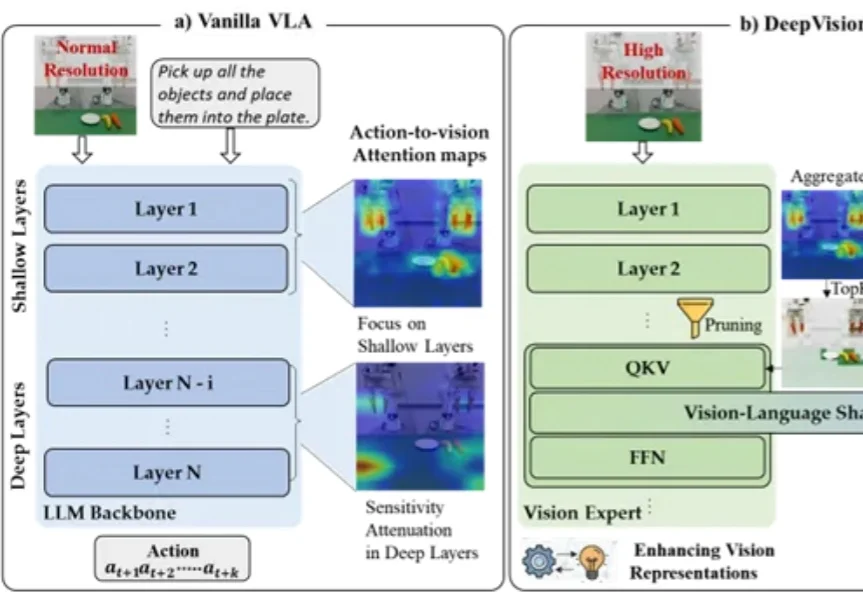
“把水果放进盘子里”——机器人看懂了指令,开始执行,却在最后关头抓偏了。
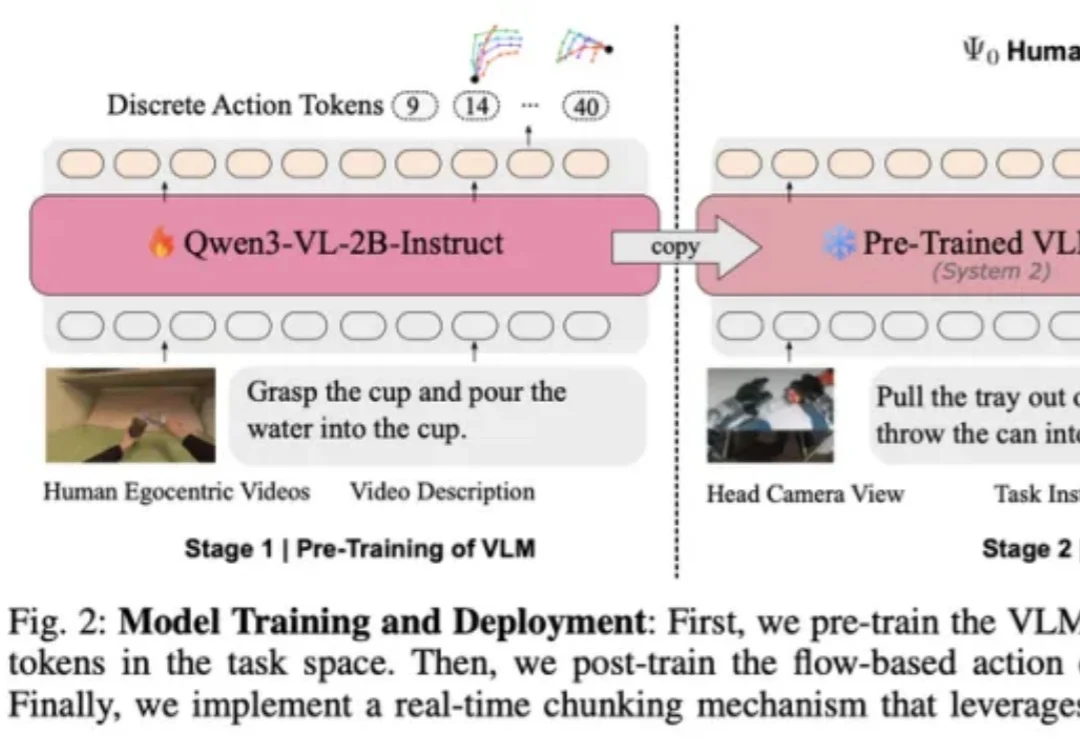
人形机器人在春晚舞台上大放异彩!然而,人们在看惯了机器人跳舞、后空翻,乃至武术表演之后,不禁开始思考:机器人何时才能真正走进大众生活,解决日常生活中的琐碎任务,从而解放人类的双手?

域名圈再迎里程碑式交易!据Sedo官方爆料,机器人核心域名 Bot.ai 以120 万美元(约合人民币 870 万元)成交,直接打破此前 wisdom.ai 创下的 75 万美元.ai 域名最高交易纪录,也再次引爆机器人+AI 赛道的数字
又一位华为天才少年加入具身智能创业战场。
小时候看《冰雪奇缘》,相信有不少小孩问过父母:雪宝是真的吗?
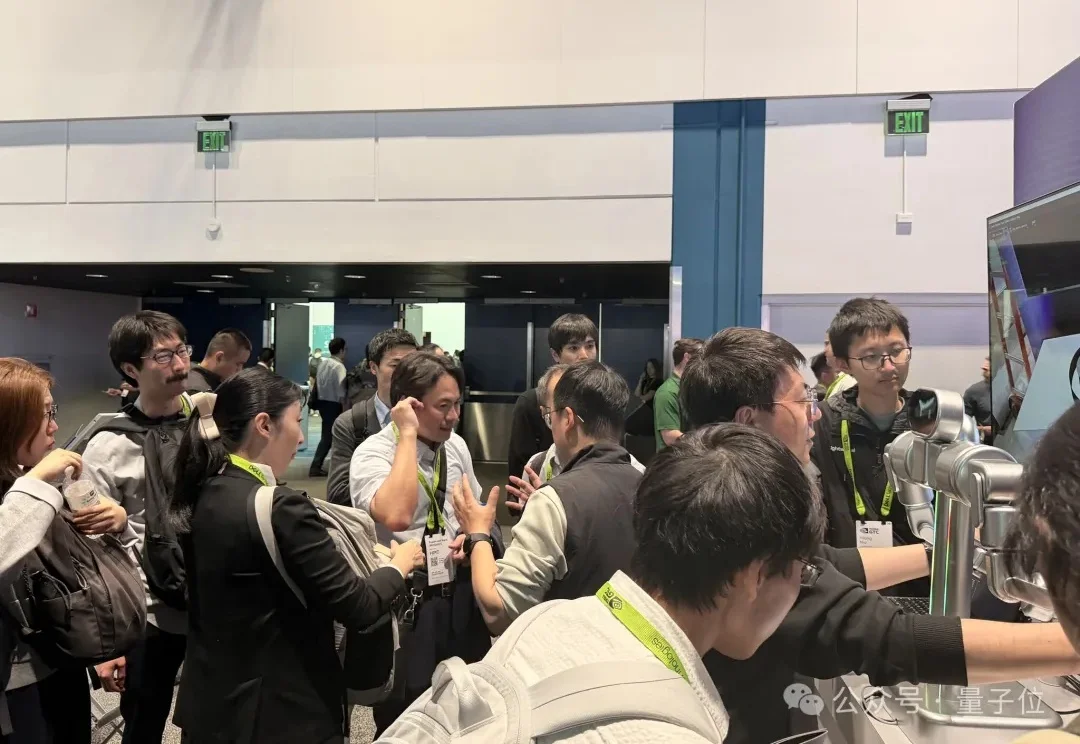
GTC 2026,比往年更热。