机器人视觉控制新范式!ByteDance Research新算法实现通过性能SOTA
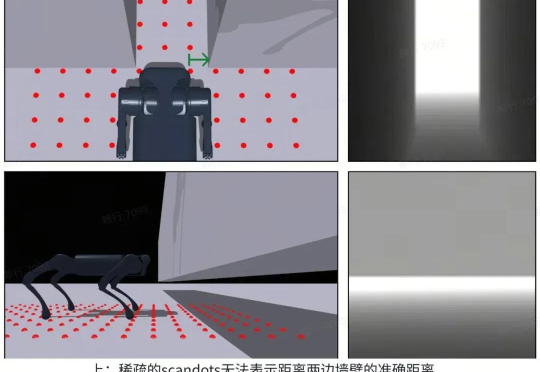
机器人视觉控制新范式!ByteDance Research新算法实现通过性能SOTA世界模型(World Model)作为近年来机器学习和强化学习的研究热点,通过建立智能体对其所处环境的一种内部表征和模拟,能够加强智能体对于世界的理解,进而更好地进行规划和决策。
来自主题: AI技术研报
8566 点击 2025-02-21 14:28
 搜索
搜索
世界模型(World Model)作为近年来机器学习和强化学习的研究热点,通过建立智能体对其所处环境的一种内部表征和模拟,能够加强智能体对于世界的理解,进而更好地进行规划和决策。
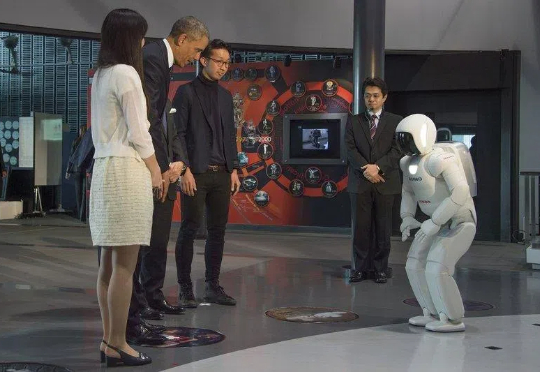
在人形机器人热潮里,日本与世界完美错开了步调。
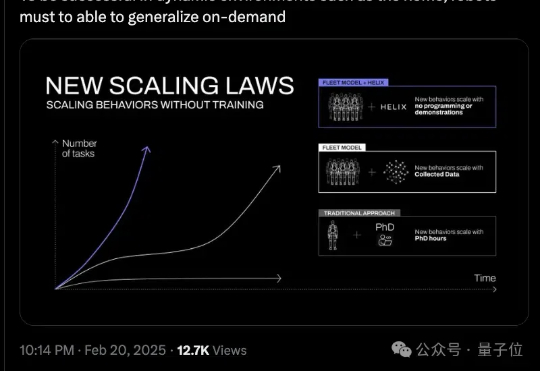
与OpenAI断交之后,Figure首个成果出炉:Helix,一个端到端通用控制模型,它能让机器人像人一样感知、理解和行动。只需自然语言提示,机器人就能拿起任何东西,哪怕是从没见过的东西,比如这个活泼的小仙人掌。
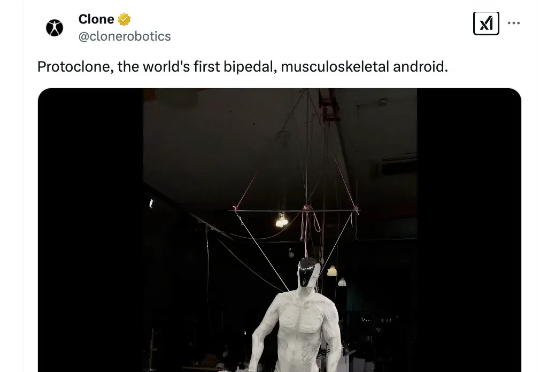
同是机器人,命运却各有各的不同。有的机器人出生不久就站上了春晚舞台给全国人民送祝福,而有的机器人刚来到人类世界五分钟就选择了上吊。如果是半夜打开这篇文章,已经有被吓到的网友当了你的嘴替:「像新鲜的尸体一样抽搐。」

蚂蚁集团开始自研人形机器人产品。

据 The Information 报道,Field AI 是一家成立两年的初创公司,专注于开发人工智能模型以驱动机器人,正在洽谈以 20 亿美元的估值筹集数亿美元资金。这将使该初创公司的估值比去年夏天翻四倍,当时包括 Nvidia 在内的投资者将其估值为 5 亿美元。
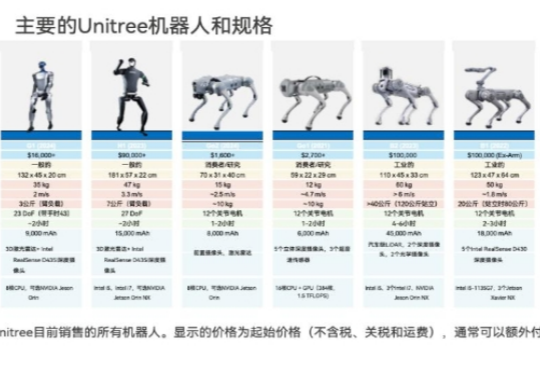
除了DeepSeek外,最火的初创科技公司恐怕要数宇树科技了。 当杭州宇树科技的人形机器人穿着东北大花袄,跳着扭秧歌登上央视蛇年春晚时,对于喜欢热闹的中国人而言,最大的惊喜莫过于收到了一个意外的科技红包。

2025年,预期实现千万元级营收。
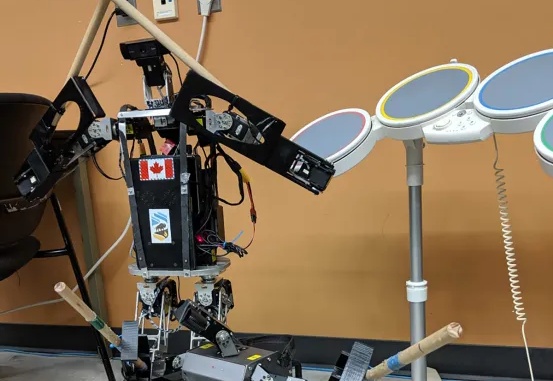
很多人在学生时代都有一个音乐梦想,这个乐队梦通常最后苦于凑不齐吉他手、鼓手、贝斯手、键盘手等等乐手而做罢。

“这机器人绝对是AI或CG合成的!”“这也太假了。”在一片质疑声之下,宇树科技CEO王兴兴在小红书上发了段自家机器人的最新视频:这段视频是宇树G1机器人的实拍,最大特点就是在机器人后边放了块大镜子。