# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
1米3的机器人小土豆,三步上篮也可以如此丝滑。

别误会,这台宇树G1暂时还不准备参加NBA选秀,但它刚解锁的 “现实世界打篮球” 技能,离上“村BA”首发应该不远了。
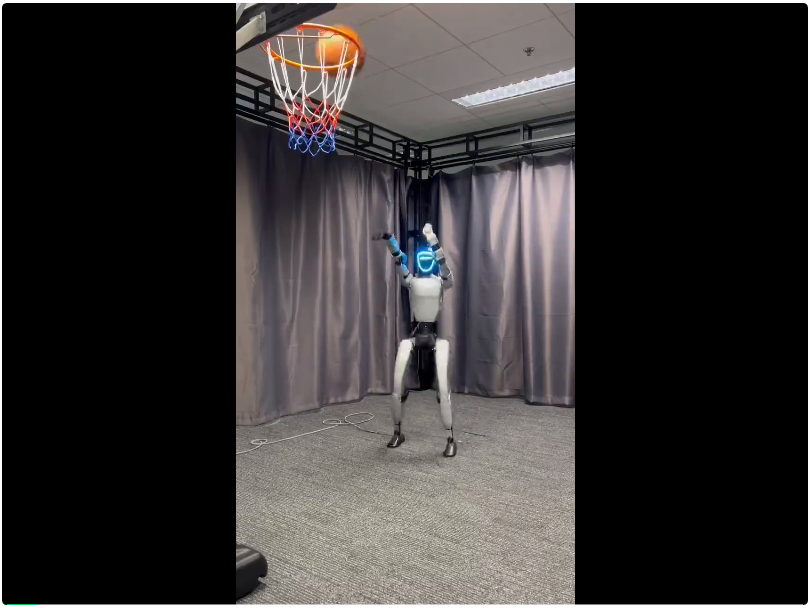
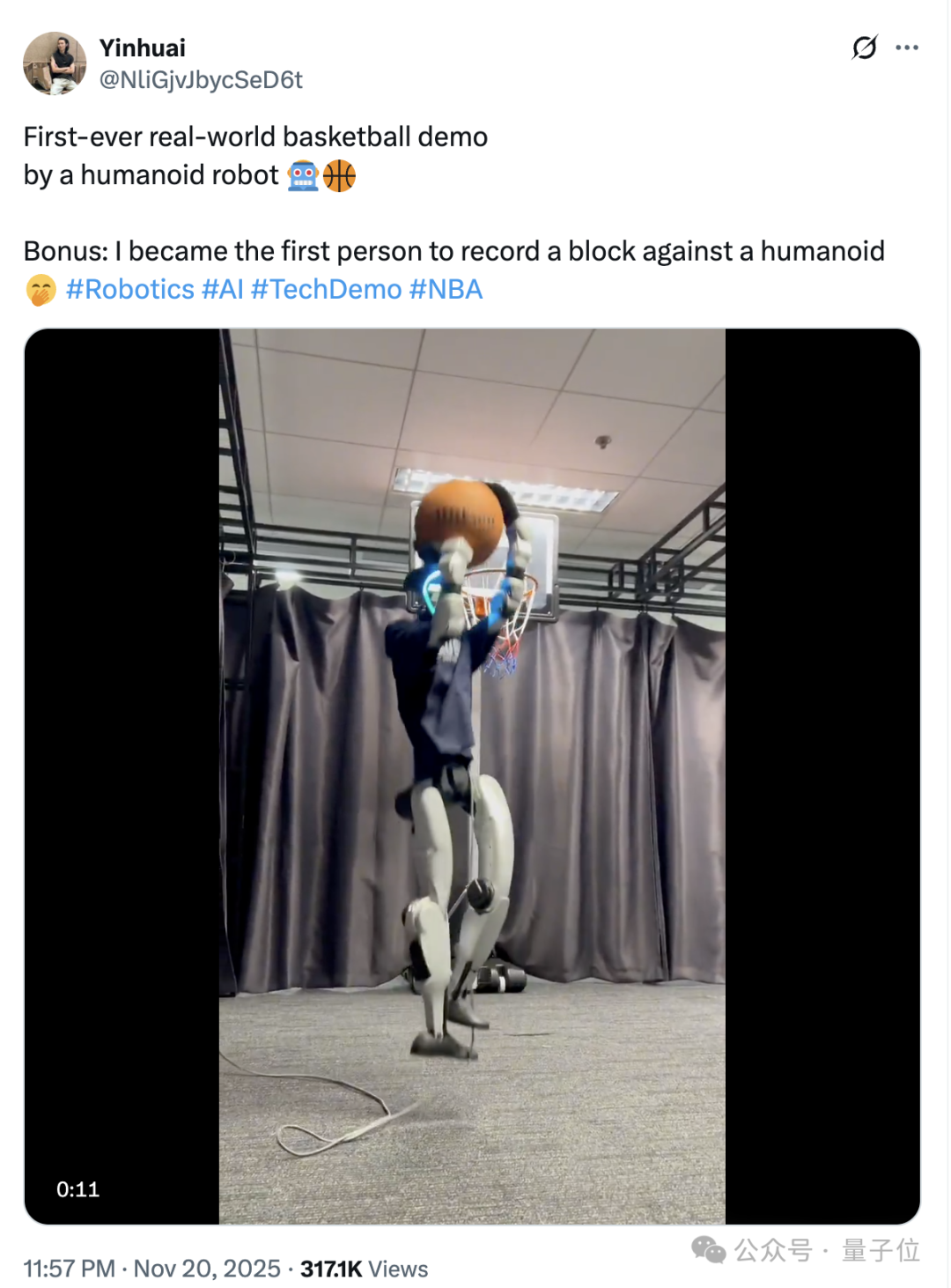
据悉,这是全球首个能在真实场景中完成篮球动作的机器人demo,来自香港科技大学的研究团队。
虽然团队还没公开完整的技术细节,但结合他们此前让机器人“打篮球”的工作,这次很可能是在之前研究的基础上,进一步改良而来。
接下来,让我们一窥究竟。
首先是被收录于SIGGRAPH 2025的SkillMimic-V2: Learning Robust and Generalizable Interaction Skills from Sparse and Noisy Demonstrations。
SkillMimic-V2旨在解决交互演示强化学习(RLID)中演示轨迹稀疏、含噪且覆盖不足的难题。
其通过引入拼接轨迹图(STG)与状态转移场(STF)、自适应轨迹采样(ATS)等技术,成功地在低质量数据条件下,训练出了兼具鲁棒恢复能力与技能迁移能力的复杂交互策略 。
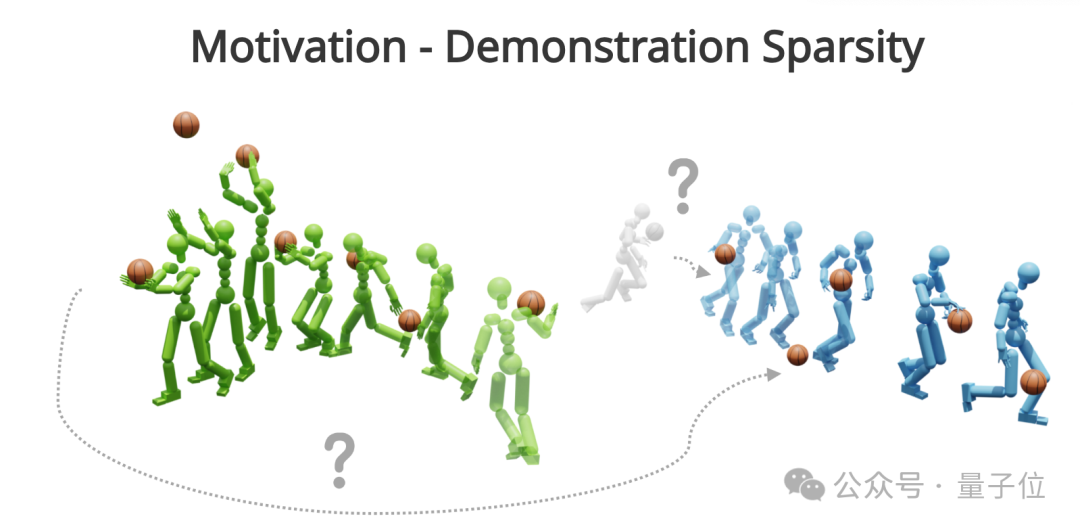
当前,通过动作捕捉等方式收集的数据往往存在以下缺陷:
这些有缺陷的数据无法捕捉到技能变体和转换的完整频谱。
不过,相比直接去收集更好的数据,研究认为尽管演示数据是稀疏和嘈杂的,但存在无限的物理可行轨迹 。
这些潜在的轨迹天然地能够桥接不同的技能,或者从演示状态的邻域中涌现出来。
这就形成了一个连续的、可能的技能变体和转换空间,从而可以利用这些不完美的演示数据,训练出平滑、鲁棒的策略。

基于以上认识,研究提出三个关键步骤发现并学习这些潜在轨迹:
由此,技能转换和泛化能力能够远超最初不包含任何技能转换或错误恢复的稀疏演示,实现更高效地技能学习与泛化性。
比如,在仿真环境(Isaac Gym)中,机器人可以在受到干扰时,仍可以完成上篮动作。

还能实现运球-投篮间的技能转换。

实验表明,相比此前的SOTA (SkillMimic)方法,SkillMimic-V2在困难技能(如 Layup)上的成功率从0提升到了91.5%。技能转换成功率 (TSR) 更是从2.1%飙升至94.9%。

接下来是SkillMimic-V2的前作——SkillMimic: Learning Basketball Interaction Skills from Demonstrations,这篇论文入选了CVPR 2025 Highlight。
SkillMimic旨在解决物理模拟人-物交互(HOI)中传统方法依赖繁琐手工奖励设计且难以在统一框架下掌握多样化技能的难题。
其通过引入统一HOI模仿奖励与接触图(Contact Graph)、分层技能复用等技术,成功地在单一奖励配置下,训练出了兼具精准接触控制与长程任务组合能力的通用交互策略。
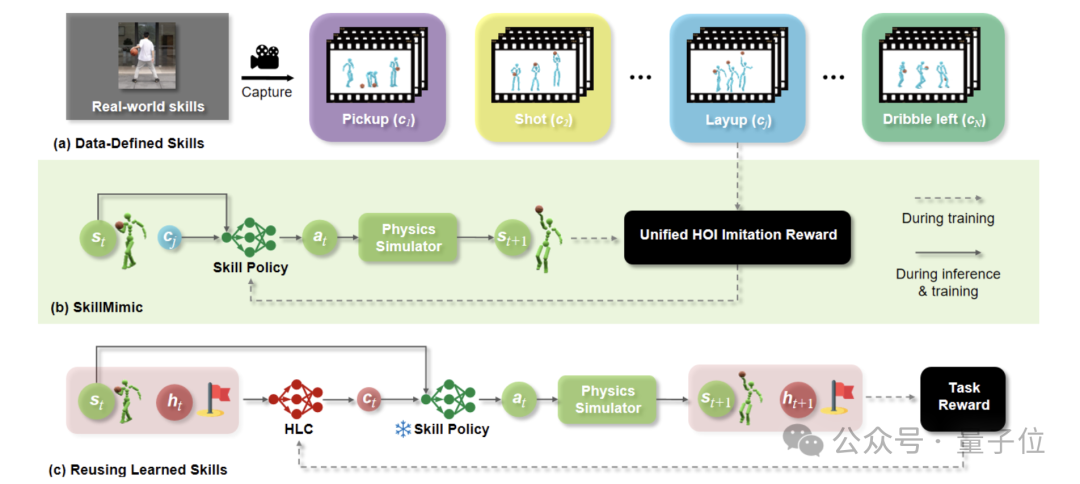
研究pipeline包含三个部分:
其中,SkillMimic方法的关键在于:
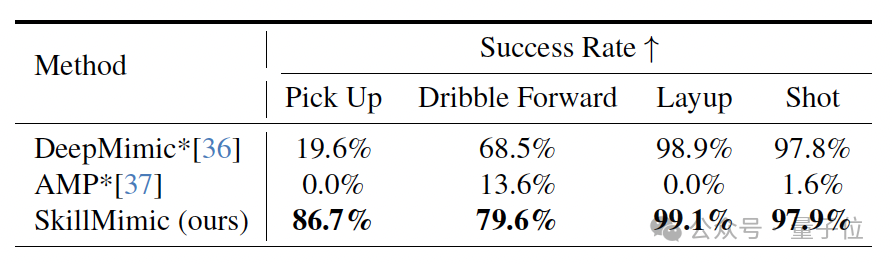
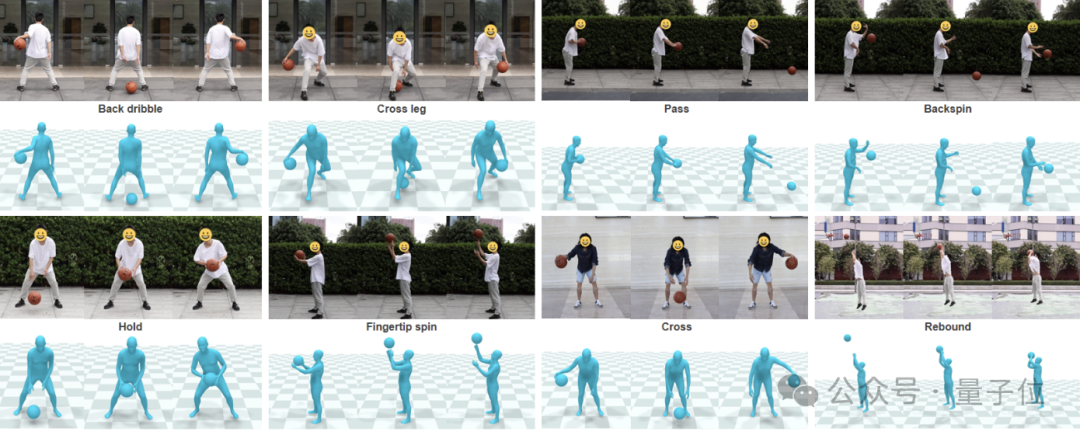
实验表明,SkillMimic能够使用同一套配置学会多种风格的篮球技能(运球、上篮、投篮等),成功率显著高于DeepMimic和AMP。
在演示中,我们可以看到,仿真环境的机器人能够实现绕圈运球等高级技能。

如果追溯SkillMimic作者的工作,就会发现早在2023年,论文PhysHOI: Physics-Based Imitation of Dynamic Human-Object Interaction就试图让仿真中的机器人能够根据演示学习篮球技能。
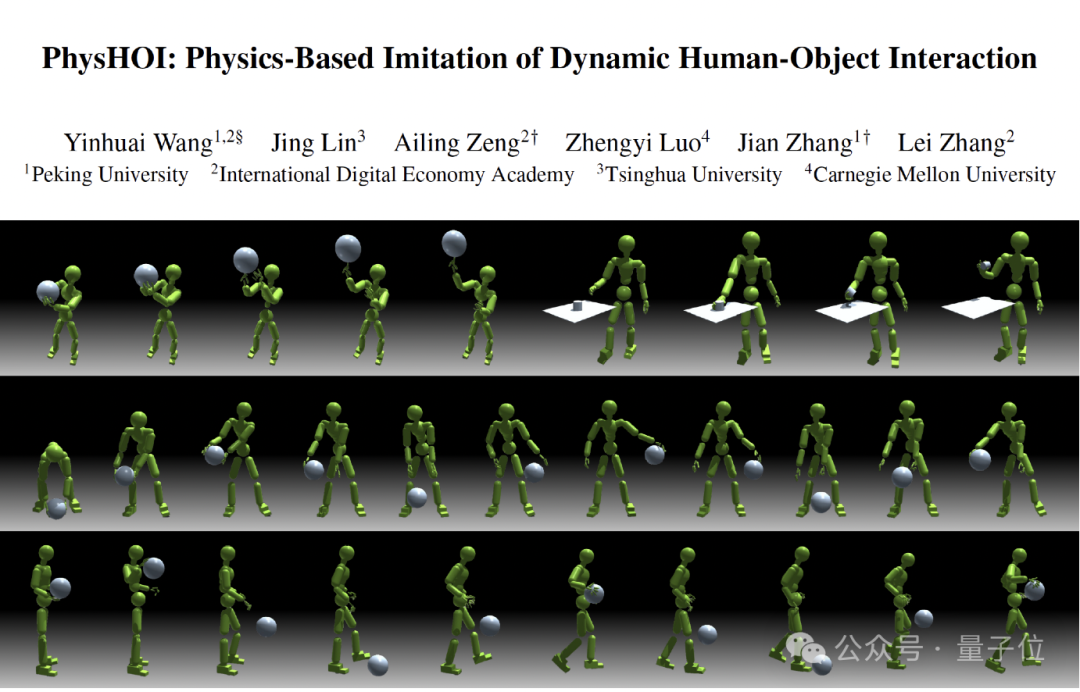
为实现这一点,PhysHOI在当时提出了一种基于物理仿真的动态人-物交互(HOI)模仿学习框架。

简单来说,给定参考的HOI数据,将当前的模拟HOI状态与参考HOI状态一起输入策略模型。
策略输出动作,并通过物理模拟器生成下一步的模拟HOI状态,然后将运动学奖励与接触-抓取(CG)奖励加权结合,并优化策略以最大化期望回报。
重复上述过程直至收敛,即可复现参考数据中的HOI技能。
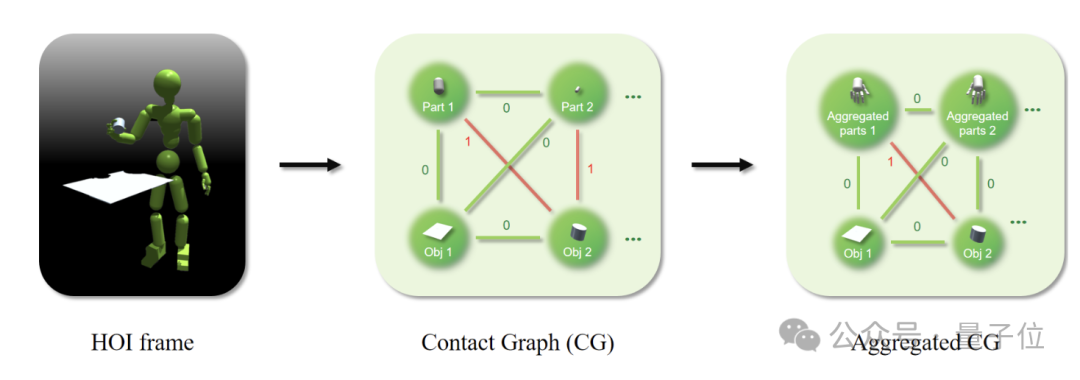
除此之外,为防止运动学模仿奖励陷入最优解,研究还引入了接触图(Contact Graph)——
给定一个HOI帧,接触图节点包含所有身体部位和物体。每条边都是一个二元接触标签,表示接触与否。为了简化计算,还可以将多个身体部位聚合到一个节点中,形成聚合接触图。
同时,为了弥补HOI场景的不足,研究还引入了全身篮球技巧的BallPlay数据集。
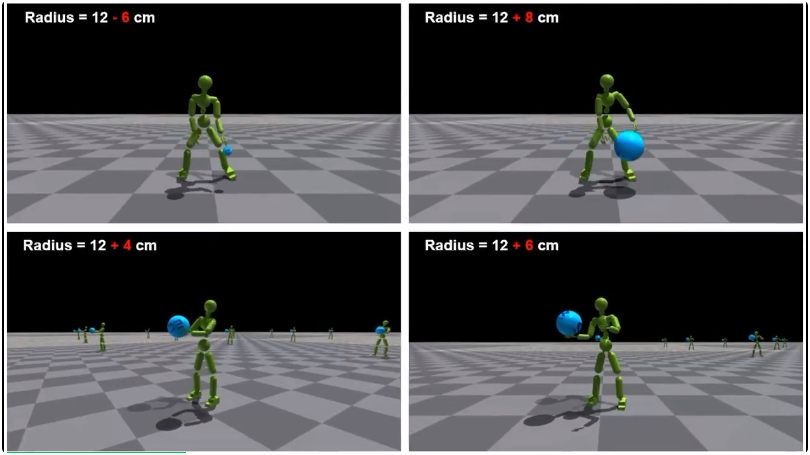
在实验中,PhysHOI在不同大小的篮球操作上表现出了鲁棒性。
值得一提的是,在PhysHOI、SkillMimic 、SkillMimic-v2三篇工作中,王荫槐都担任了核心角色,网友调侃他是“篮球科研第一人”。

王荫槐是香港科技大学的博士二年级学生,导师为谭平教授。
在此之前,他硕士就读于北京大学,本科毕业于西安电子科技大学,并于IDEA Research、宇树科技以及上海人工智能实验室等机构进行实习。
从2023年在仿真环境的小试牛刀,到这次直接让机器人在真实环境中打球,得益于机器人本体的发展,这速度真是很快了!

参考链接
[1]https://x.com/NliGjvJbycSeD6t/status/1991536374097559785
[2]https://wyhuai.github.io/info/
[3]https://ingrid789.github.io/SkillMimicV2/
[4]https://wyhuai.github.io/physhoi-page/[5]https://ingrid789.github.io/SkillMimic/
文章来自于“量子位”,作者 “henry”。


