# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
还记得之前非常火的雪宝Olaf机器人吗?
那个走起路来晃晃悠悠、神态活灵活现的小家伙曾让无数人直呼“次元壁破了”。近期,迪士尼幻想工程(Disney Research Imagineering)终于揭开了它的神秘面纱,正式发表了题为“Olaf: Bringing an Animated Character to Life in the Physical World”的技术论文。

当我们翻开这篇论文,才发现“卖萌”背后的代价是惊人的。原来,为了让这个头大身子小、完全不符合物理规律的动画角色走进现实,工程师们不仅设计了极其怪异的“非对称骨骼”,甚至被迫让AI学会了“怕热”和“轻手轻脚” 。这不是魔法,这是顶级工程学对动画物理的一次硬核挑战。
与波士顿动力的Spot或Atlas不同,Olaf的设计初衷不是为了越野或搬运,而是为了娱乐和陪伴,这就带来了特殊的挑战:

要制造Olaf,首先要解决的是“皮囊”之下的骨架问题。
研究者设计出的机器人身高88.7厘米(不含头发),重14.9公斤,全身拥有25个自由度。
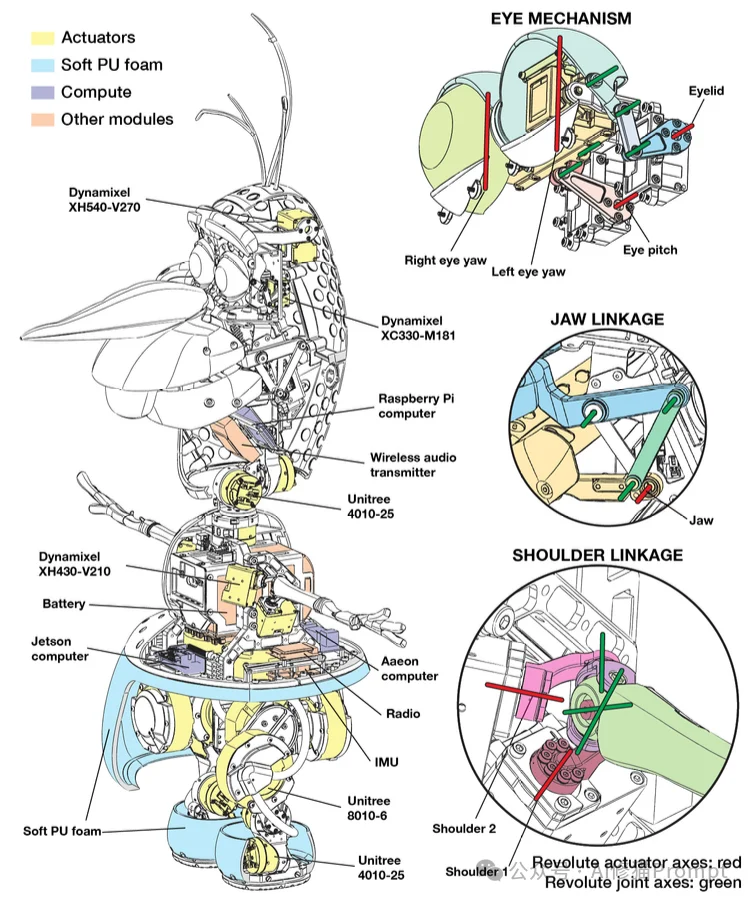
为了还原角色外观,机械设计必须在这个极其紧凑的体积内完成所有功能的布局。
在动画中,Olaf的脚是两团在身体下方自由移动的小雪球,看不见腿。
为了在现实中制造这种错觉,研究者必须把腿部机构完全隐藏在下半身的“大雪球”躯干里。
这就带来了一个巨大的空间难题:如果采用传统的对称腿部设计,两个髋关节驱动器会在狭小的空间内打架。
研究者给出了一个非常规的解决方案:非对称的6自由度腿部设计。
这种“一前一后”的交错布局,巧妙地避免了内部机械碰撞,最大化了腿部的活动范围。
同时,由于两条腿的零件其实是相同的(只是安装方向不同),这还减少了零件的种类。
为了遮挡这些机械结构,Olaf的下半身并不是坚硬的外壳,而是一条由聚氨酯(PU)泡沫制成的“软裙子”。
这个设计有两层深意:
Olaf的手臂像树枝一样细,肩膀处根本塞不进电机。
但这难不倒研究者。他们采用了连杆机构(Linkages) 来实现“隔空打牛”。
这样一来,手臂依然可以灵活摆动,而驱动它的“肌肉”却藏在了肚子里。
看过电影的您一定记得,Olaf的身体部件经常散架。
现实中的机器人保留了这个有趣的特性。
手臂、鼻子、扣子、眉毛和头发都是通过磁铁吸附在服装表面的。
这不仅是为了还原角色,更是一种安全机制:
当机器人意外摔倒或发生碰撞时,这些突出的部件会直接脱落,而不是折断或戳伤旁人。
拥有了身体,还需要一个能驾驭这副奇怪躯体的“大脑”。
Olaf的动作不仅要稳,还要“像”。它需要模仿动画中那种富有弹性、卡通化的行走方式。
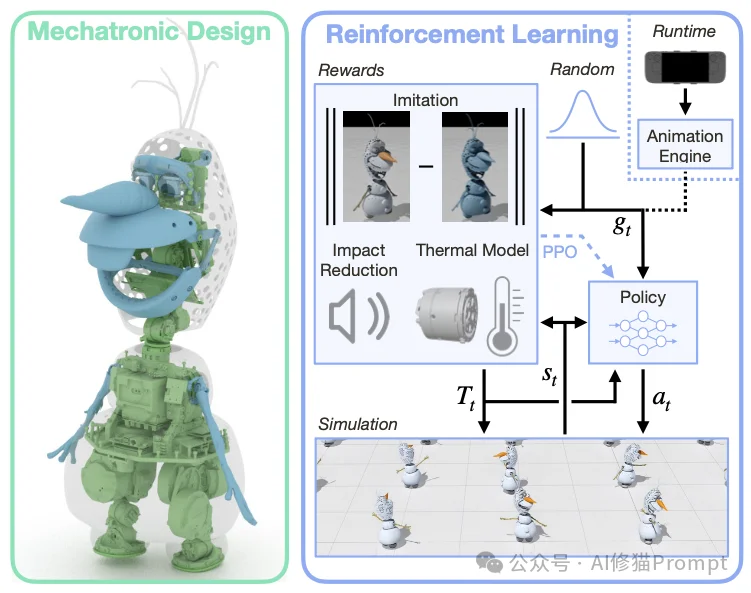
为此,研究者采用了强化学习(Reinforcement Learning, RL) 技术。
为了处理复杂的全身动作,控制系统被分为了两层:
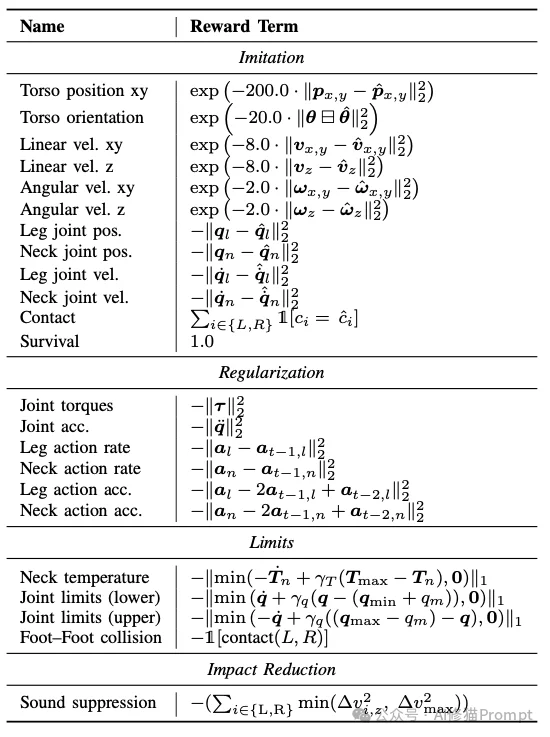
AI是通过“奖励”来学习动作的。为了让Olaf走得像个动画角色,研究者设计了一套包含四部分的奖励函数:
通过在仿真环境(Isaac Sim)中通过数千次的迭代训练,Olaf学会了如何在物理法则的限制下,走出标志性的卡通步伐。
任何在现场听过双足机器人走路的人都知道,那声音通常是“哐、哐、哐”的金属撞击声。
对于一个由雪做的角色来说,这种机械噪音会瞬间破坏“可信度”,让观众意识到面前只是一堆伺服电机。
为了解决这个问题,研究者在强化学习中引入了一项特殊的“冲击减少奖励”。
原理并不复杂,但非常有效。
在物理引擎中,脚步落地的瞬间通常伴随着垂直速度的剧烈变化。
研究者在奖励函数中加入了一项惩罚:如果脚落地时的速度变化率过大,AI就会被扣分。
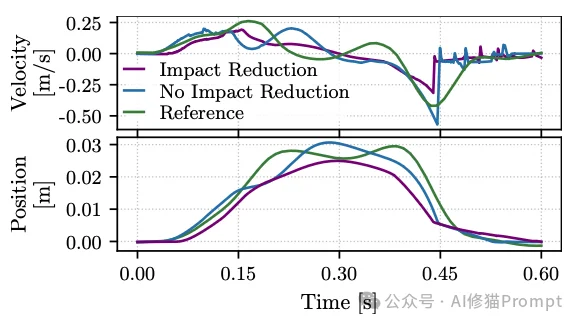
灰色线(无降噪策略):在落地瞬间(约 0.45秒处),速度曲线有一个尖锐的突变(Spike)。这就是“哐”的一声来源。紫色线(有降噪策略):曲线变得更加平滑,没有剧烈的速度跳变。这意味着脚是轻柔地“放”在地上的,而不是“砸”在地上的。
这项改进迫使AI学会了一种更轻柔的着地策略——在脚触地前的一瞬间微妙地减速缓冲。
实验数据表明,这项奖励机制将Olaf行走时的平均噪音降低了13.5分贝(dB)。
在对比视频中,未开启该功能的机器人走路像是在砸地,而开启后的Olaf步态更加轻盈流畅,更符合角色的设定。
Olaf的设计不仅考验机械结构,更考验热管理。
雪宝巨大的头部,完全依靠藏在细脖子里的微型电机来驱动。
这意味着,为了支撑头部的重量,颈部电机即使在静止时也需要输出巨大的扭矩,导致极易过热。
早期实验显示,如果不加干预,颈部电机在短短40秒内温度就能飙升到100°C,导致强制停机。研究者不能给Olaf装上巨大的散热风扇(那会破坏外观),于是他们让AI学会了“怕热”。

Top (温度): 蓝色线(无保护):温度一路飙升,40秒就冲破100度,导致实验必须强制停止。
紫色线(有保护):温度上升缓慢,始终被控制在80度的安全线以下。
Middle (误差):紫色线的误差(Joint error)在后期略微升高。这说明 AI 为了降温,主动“偷懒”了,稍微牺牲了一点动作准确度。
Bottom (扭矩):紫色线的扭矩(Torque)在大约40秒后显著下降。这是因为 AI 调整了头部姿势,减少了受力,从而让电机冷却下来。
研究者开发了一个热感知策略(Thermal-aware policy)。
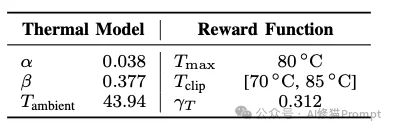
热模型与奖励参数

为了确保安全,研究者使用了一种称为控制障碍函数(Control Barrier Function) 的数学工具。
您可以把它想象成一道“软墙”:

实验结果非常有趣。
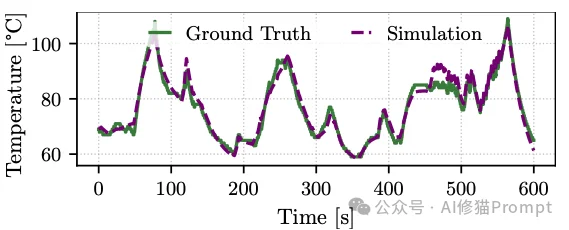
对比了预测温度(紫色虚线)和真实温度(绿色实线)。两条线几乎完美重合。这意味着,研究者在仿真软件里就能极其精确地预知现实中电机何时会过热(平均误差仅 1.87度)。这是热感知策略能成功的基础
当开启热感知策略后,随着颈部电机温度升高,Olaf并没有直接死机。
相反,它会自动调整姿态,比如稍微放平头部角度,或者减少高频的头部摆动,以此来降低维持姿态所需的扭矩。
虽然这导致动作追踪的精确度有轻微下降(误差略微增加),但成功将温度控制在了安全范围内,让机器人可以持续运行。
这就好比人累了会偷懒一样,Olaf学会了在“演得像”和“活下去”之间寻找平衡。
除了走路和平衡,Olaf的神韵还来自于它的面部表情。
这部分功能虽然不涉及复杂的平衡算法,但也充满了工程巧思。
Olaf的眼部机构拥有独立的偏航(Yaw)控制,同时通过连杆实现了眼球俯仰(Pitch)和眼睑闭合的联动。
为了让控制更精准,研究者首先在功能空间(动画师理解的“向左看”)和驱动器空间(电机转多少度)之间建立了映射关系。
这使得后台的动画引擎可以直接发送高级指令,而底层的PD控制器负责精准执行。
Olaf的嘴巴开合不仅要克服重力,还要克服服装面料的拉力。
当嘴巴闭合时,布料被拉紧;张开时,布料会起皱。这些外力是非线性的,会导致普通的电机控制不准。
为此,研究者测量了在不同张嘴角度下所需的保持力矩,并拟合了一个前馈模型(Feedforward term)。

这个模型会告诉控制器:“在这个角度,布料的拉力大概是这么多,你需要额外多出一点力。”
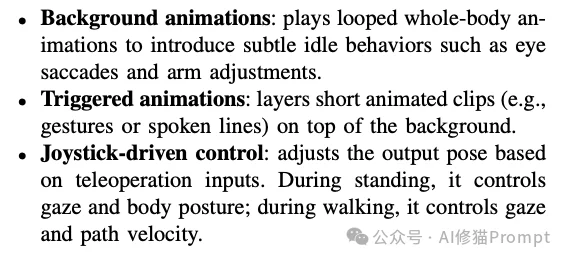
最终,所有这些技术都汇聚到了运行时的操控系统中。

通过一个定制的动画引擎,操作员可以用摇杆实时控制Olaf:
迪士尼这篇论文展示了一个非典型的机器人研发案例。
研究者并没有试图让机器人跑得更快或跳得更高,而是通过非对称的机械结构、基于感知的热管理策略以及静音行走的奖励机制,攻克了“让动画角色进入物理世界”这一难题。
Olaf机器人证明了,在严格的美学限制和糟糕的物理比例下,现代机器人技术依然可以创造出令人信服的生命幻象。
正如论文最后所提到的,这是第一款此类机器人,它为未来非人型、非工业用途的“角色机器人”设立了新的标杆。
也许在不久的将来,当我们走进主题乐园,身边走过的不再是穿着皮套的工作人员,而是这些真正从屏幕里走出来的、有温度(虽然需要控制在80°C以下)的“机械生命”。
文章来自于“AI修猫Prompt”,作者 “AI修猫Prompt”。


【开源免费】字节工作流产品扣子两大核心业务:Coze Studio(扣子开发平台)和 Coze Loop(扣子罗盘)全面开源,而且采用的是 Apache 2.0 许可证,支持商用!
项目地址:https://github.com/coze-dev/coze-studio
【开源免费】n8n是一个可以自定义工作流的AI项目,它提供了200个工作节点来帮助用户实现工作流的编排。
项目地址:https://github.com/n8n-io/n8n
在线使用:https://n8n.io/(付费)
【开源免费】DB-GPT是一个AI原生数据应用开发框架,它提供开发多模型管理(SMMF)、Text2SQL效果优化、RAG框架以及优化、Multi-Agents框架协作、AWEL(智能体工作流编排)等多种技术能力,让围绕数据库构建大模型应用更简单、更方便。
项目地址:https://github.com/eosphoros-ai/DB-GPT?tab=readme-ov-file
【开源免费】VectorVein是一个不需要任何编程基础,任何人都能用的AI工作流编辑工具。你可以将复杂的工作分解成多个步骤,并通过VectorVein固定并让AI依次完成。VectorVein是字节coze的平替产品。
项目地址:https://github.com/AndersonBY/vector-vein?tab=readme-ov-file
在线使用:https://vectorvein.ai/(付费)
【开源免费】LangGPT 是一个通过结构化和模板化的方法,编写高质量的AI提示词的开源项目。它可以让任何非专业的用户轻松创建高水平的提示词,进而高质量的帮助用户通过AI解决问题。
项目地址:https://github.com/langgptai/LangGPT/blob/main/README_zh.md
在线使用:https://kimi.moonshot.cn/kimiplus/conpg00t7lagbbsfqkq0
