# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
Harness(驾驭)的风,终究还是从大模型,吹到了机器人!
刚刚,英伟达开源了一个全新的机器人操控框架——
CaP-X。
基于这一框架,机器人能盯着摄像头看懂环境,然后现场写一段Python代码来控制自己。
关键,这还不是一次性的。如果某段代码成功完成任务,它会被自动存进技能库,而且适用于不同本体、形态的机器人系统。
(是不是很像龙虾的Skill?)
最离谱的是,这一框架还能把具身大模型(比如VLA)当作API来用,直接一个大脑harness各类小脑(感知与控制)。
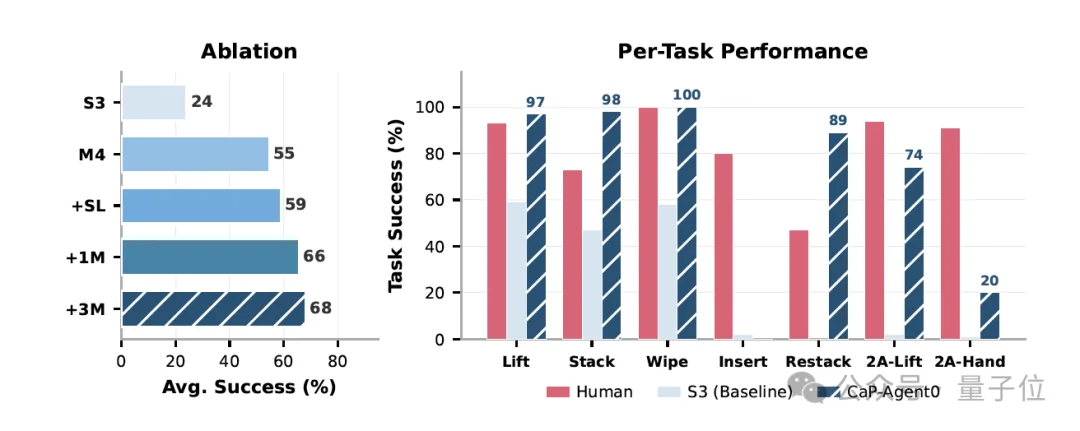
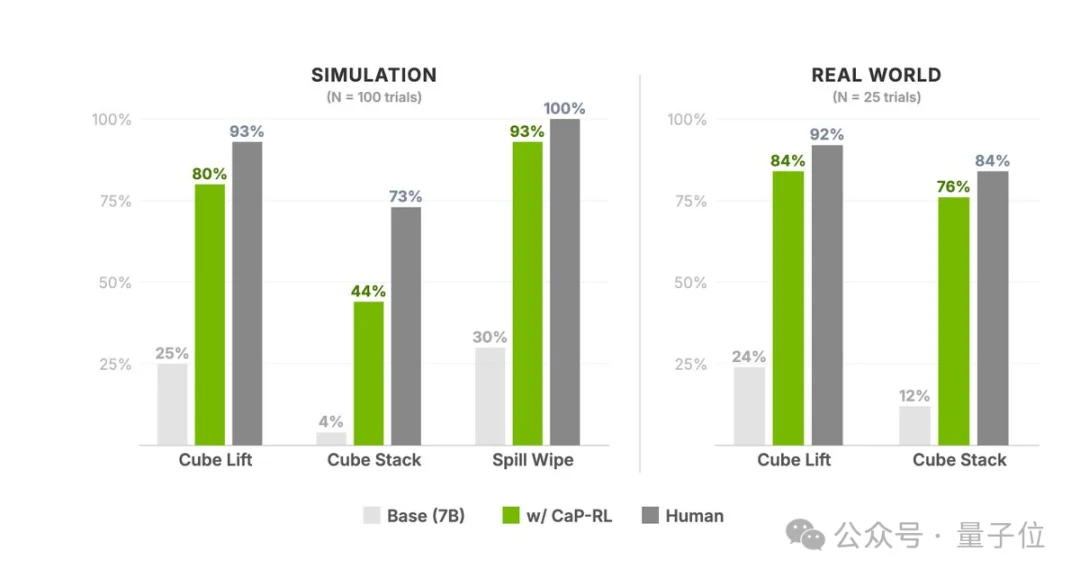
在实测表现中,基于这一框架打造的CaP-Agent0,在7项核心任务中,有4项成功率追平甚至超过人类专家手写程序。
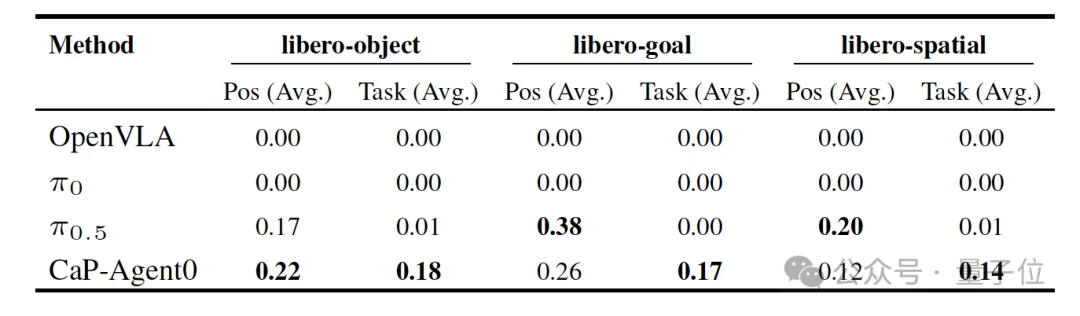
即便面对OpenVLA、Pi系列等基于预训练的端到端大模型,CaP-X这种“靠逻辑取胜”的方案也展现出了旗鼓相当、甚至更领先的性能。
英伟达机器人总管Jim Fan直接下结论:
智能体机器人(Agentic robotics)的时代,来了!

如果说Harness之于大模型,是把引擎装进一辆车;
那么CaP-X之于机器人,就是让这台引擎学会了根据路况自己写驱动程序,并随时给自己升级“代码外挂”。
这一框架的发布,标志着机器人领域正式迎来了属于自己的“Harness”时代。
对此,UCB教授Ken Goldberg评论道:
对机器人「代码即策略」(CaP)的前景感到非常兴奋!
要理解CaP-X在做什么,咱们先简单回顾一下当前机器人控制的主流做法。
在传统的机器人控制中,工程师得逐行编写感知、规划和反馈逻辑(比如经典的TAMP框架),也就是所谓的Human-in-the-loop(人工干预)。
这种方法虽然精准透明,但泛化性极差——经常是“换个杯子,代码重写”。
后来,受到大模型Scaling Law的启发,机器人领域开始采用基于数据驱动范式的、端到端的视觉-语言-动作(VLA)模型。
在过去的一年里,VLA 架构(视觉-语言-动作)战绩斐然,机器人开始能叠衣服、干杂活。
但问题在于,VLA是个“黑盒”,一旦出错很难调试,而且遇到新任务还得重新收集数据训练。
也就在最近,受到龙虾(OpenClaw)、Claude code等一系列编程智能体进展的启发。
研究人员开始思考,能否用Gemini、GPT这样的大模型来替代传统控制中工程师的角色,用Python代码直接调用机器人的接口?
而这,就是CaP-X产生的背景,它让大模型从“发号施令的指挥官”,变成了“能写代码的程序员”。
更进一步,在CaP-X框架里,连VLA策略也只是一个可以被随时调用的 API。
简单来说,以往的VLA是机器人的“全脑”,从看图像到动手指全靠它。但在CaP-X里,VLA变成了代码里的一行函数。
比如,当机器人需要“把盖子拧开”这种极高频、重手感的精细活时,编程智能体不再自己写复杂的几何坐标,而是直接调用VLA,让VLA来执行精细的复杂操作。
就这样,CaP-X用通用的编程智能体取代了人类工程师,配齐了全套的感知和驱动接口,甚至能在干活的过程中自动合成技能库,调用专攻操作的具身模型。
接下来,我们具体来看。
CaP-X本质上不是一个模型,而是一整套驾驭框架,包括:交互式训练环境CaP-Gym、层级化基准测试CaP-Bench、无需训练的智能体框架CaP-Agent0和强化学习进化算法CaP-RL。
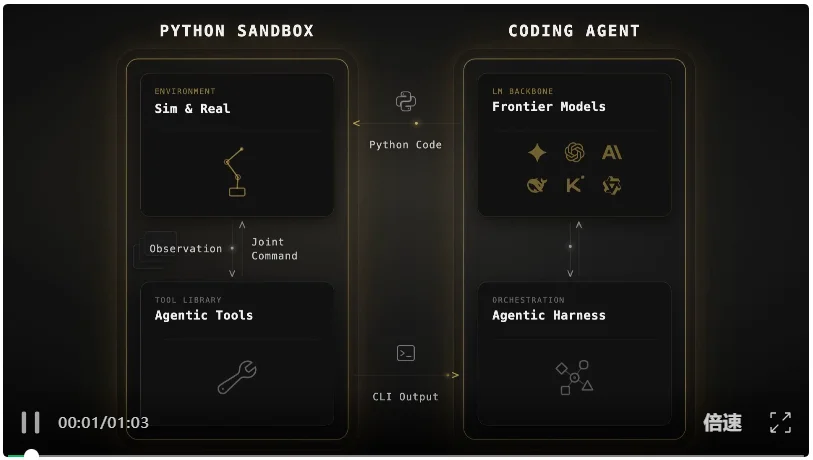
作为整个框架的核心,CaP-Gym是一个基于标准Gymnasium接口构建的层级化控制框架。
它将数字大脑和物理身体连接起来,大模型每写出一行代码,物理世界(模拟器或真机)就会实时给出反馈。
在框架上,CaP-Gym统一了感知基元与控制基元:
在感知方面,智能体通过模块化的感知基元从环境中获取数据,这些基元将原始传感器数据抽象为结构化的语义对象。
它内置了SAM3(语义分割) 和Molmo 2(点选) 等工具,把原始图像直接变成“这里有一个苹果”、“那里有一个杯子”这种结构化的语义对象。
在控制方面,智能体不直接发布关节空间动作指令,而是调用运动规划器或逆运动学(IK)解算器(如PyRoki)自动处理碰撞检测和路径规划。
也就是说,无论是单手抓取、双臂协作还是移动机器人,CaP-Gym提供了一个让大模型能直接在笛卡尔空间里进行“逻辑编程”的交互式沙盒。
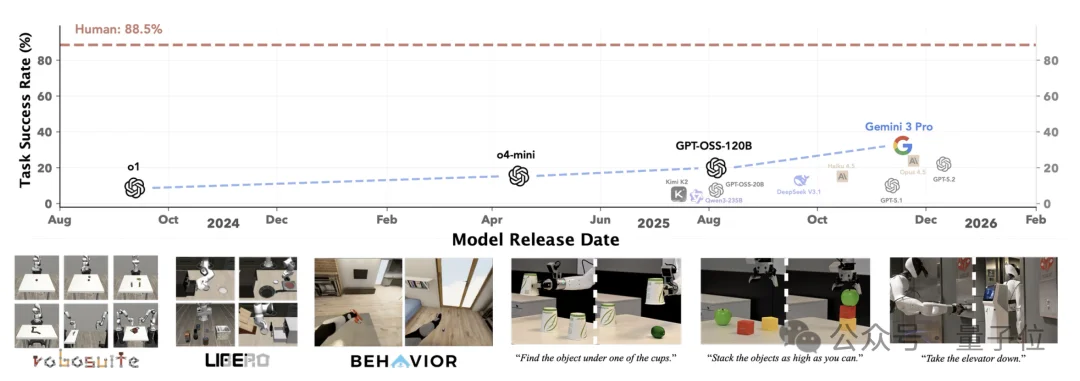
在CaP-Gym的基础上,研究还推出了CaP-Bench,用来衡量模型能不能“驾驭”机器人。
它专门用来测试当模型被推到第一线去“写动作代码”时,它的代码质量、逻辑严密性以及面对物理反馈时的纠错能力到底如何。
CaP-Bench主要从三个维度进行测试:
在对12个最先进的大模型(包括 OpenAI o1、Gemini 3 Pro 等)进行单轮盲测后,结果表明:
随着人类先验(脚手架)的移除,所有前沿模型的性能断崖式下跌,没有一个能在底层基元上达到人类专家的零样本成功率。
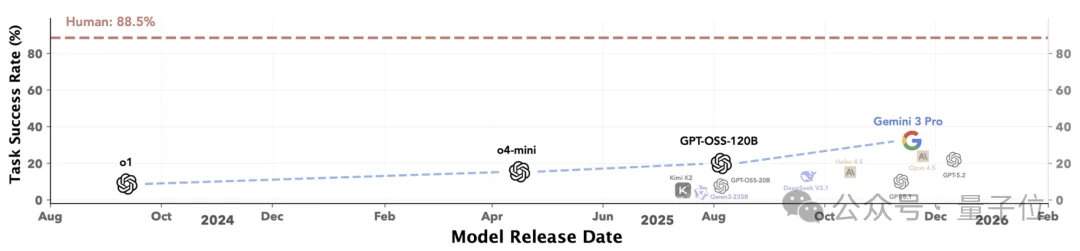
这证明了:如果没有好用的接口,目前强如GPT、Gemini 3 Pro的模型,在底层动作逻辑面前依然会“抓瞎”,离人类专家的水平还差得远。
基于CaP-Bench的失败模式与经验,研究又进一步推出了CaP-Agent0。
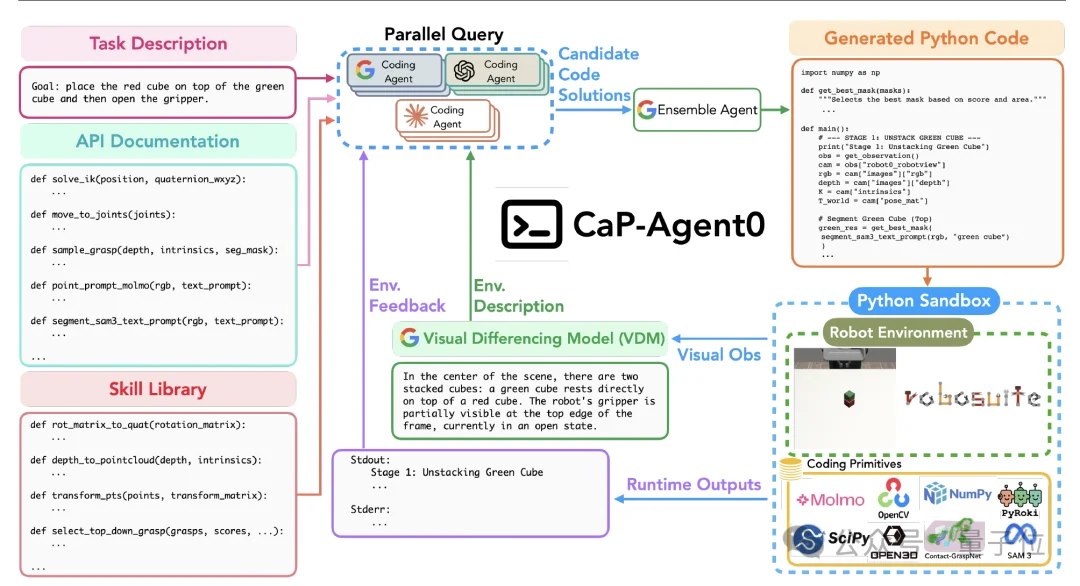
CaP-Agent0通过专门的多轮推理循环和动态合成的技能库增强了基础模型,核心组件如下:
此外,团队还推出了CaP-RL,直接利用环境反馈的成功与否作为可验证奖励,用强化学习(GRPO)来后训练编程模型本身,让它的写码直觉越来越准!
如开头所说,在CaP-Bench的7项核心任务中,即便剥离了所有高级接口、只给最底层的原子基元,CaP-Agent0依旧表现优异。
在总共7项任务中,不仅在4项任务上的成功率追平,甚至还超越了人类专家写的参考程序。
而在LIBERO-PRO的长程任务中,面对指令或位置的随机干扰,无需训练的CaP-Agent0展现出了比OpenVLA等端到端模型更强大的鲁棒性。
此外,由于CaP-RL是在代码逻辑层进行强化学习,而非像素层,这种能力还可以直接零样本(Zero-shot)无损迁移到真实世界的机器人上。
在论文的最后,团队也坦诚地分享了目前的边界:
虽然程序化控制(CaP)在长程推理和逻辑规划上效果不错,但在需要极高频视觉反馈和细腻触觉感知的“精细活儿”上(比如倒水、精准插拔),目前的纯代码方案还显得有些脆弱。
一个极具前景的方向是CaP–VLA混合策略:
由编程智能体管理高层任务逻辑和错误恢复,而将底层执行委派给VLA模型。
从机器人技术的角度来看,通过引入基于优化的控制基元(允许智能体指定任务级约束并考虑避障),可以进一步提升鲁棒性。
实话说,代码即策略(Code as Policy)的思路,其实并不是什么新鲜玩意。
早在2022年,谷歌就提出了CaP。
(是的,Physical Intelligence的CEO Karol Hausman也是当年这篇论文的作者之一。)
CaP的核心思想是:不要让大模型只输出“下一步做什么”,而是直接让它把机器人执行的Python代码写出来。
也就是说,不同于以往把大模型当作高层规划器,先输出抽象步骤,再由其他模块执行的方法,CaP直接生成更接近最终控制层的策略代码 。
这样做有两个显而易见的好处:
一是代码天然适合表达条件判断、局部反馈回路和精确数值控制。
二是也更容易把“靠近一点”“快一点”这类模糊指令转成具体动作参数 。
近年来,沿着这一路径的探索很多,但大多数研究往往难以很好地区分:
到底是模型本身聪明,还是工程师设计的接口提前把活儿给干了一大半?
除此之外,大家也没搞清楚,如果让模型多思考一会儿、多调试几次(也就是测试时计算),能不能弥补它在底层操作上的笨拙。
而CaP-X 就像是这条路线的加强版,它证明了:
具身智能的突破,或许不需要无休止地堆砌真实的遥操数据。
伴随着让模型在推理时多动脑子、用编程智能体代替人类在环的风潮吹向机器人领域,CaP-X给出了一个新解法:
给大模型一个合理的“驾驭框架(Harness)”,让它在代码的虚拟沙箱中自我试错、自我提炼,它就能进化出适应一切物理世界的能力。

参考链接
[1] https://capgym.github.io
[2]https://arxiv.org/abs/2603.22435
文章来自于"量子位",作者 "henry"。


【开源免费】Browser-use 是一个用户AI代理直接可以控制浏览器的工具。它能够让AI 自动执行浏览器中的各种任务,如比较价格、添加购物车、回复各种社交媒体等。
项目地址:https://github.com/browser-use/browser-use
【开源免费】AutoGPT是一个允许用户创建和运行智能体的(AI Agents)项目。用户创建的智能体能够自动执行各种任务,从而让AI有步骤的去解决实际问题。
项目地址:https://github.com/Significant-Gravitas/AutoGPT
【开源免费】MetaGPT是一个“软件开发公司”的智能体项目,只需要输入一句话的老板需求,MetaGPT即可输出用户故事 / 竞品分析 / 需求 / 数据结构 / APIs / 文件等软件开发的相关内容。MetaGPT内置了各种AI角色,包括产品经理 / 架构师 / 项目经理 / 工程师,MetaGPT提供了一个精心调配的软件公司研发全过程的SOP。
项目地址:https://github.com/geekan/MetaGPT/blob/main/docs/README_CN.md
