# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
人工智能和机器人领域,有一个反直觉现象:
往往人类觉得复杂、困难的任务,机器人做起来很容易;而人类不以为意的一些感知与运动技能,让机器复现异常困难。
就像AlphaGo可以轻松打败人类围棋冠军,但如果将其置于机器人体内,可能连一只猫都抓不稳;
大模型能破解国际数学奥林匹克竞赛难题,却无法驱动机械手精准地捏起一支笔并写下答案。
这种人类对任务预期与机器实际处理难度的理解错位,就是莫拉维克悖论。
因为对世界人形机器人大赛“有点失望”,前Google资深机器人专家Benjie Holson用自己的名字创办了Benjie’s Olympics,向机器人专家们发出挑战。
在这个具身灵巧操作奥林匹克的“赛场”,机器人可以挑战15项任务,包括抹花生酱、洗油腻的平底锅、插钥匙开锁、把袜子翻过来等人类最日常的动作。
这也是莫拉维克悖论中,机器很难处理的各种典型场景。
有参赛团队耗费6个月打磨Demo,在任务挑战中遭遇“滑铁卢”,3天内失败率高达90%,尽显赛事的严苛与残酷。
这15项任务来自5个Event:开门、洗衣、基本工具使用、指尖、湿滑路面。
每个Event下都有3个任务,按照难度的不同,分为金银铜牌。只有每项任务获得第一,才能摘得对应的奖牌。
在一轮轮的贴身肉搏中,来自中国的具身智能公司星动纪元,一举斩获三项任务全球第一,包括两项金牌难度任务第一,一项银牌难度任务第一。

在剥橘子、开锁、翻袜子任务中,其表现全面超越美国明星具身智能公司Physical Intelligence(简称“PI”),刷新世界纪录。
要知道,在其他比赛里出现的PI,大多是别人拉着它的开源模型去跑的,并不是PI主动参加。
但Benjie’s Olympics是PI目前唯一一个主动参加的比赛。用的还是闭源模型,代表了PI的最高水平。
星动纪元作为该赛事目前唯一上榜的中国具身企业,也是唯一一个在该比赛中打败了PI闭源模型的玩家。
和正规机器人大赛相比,Benjie’s Olympics没有繁琐的报名流程、华丽的赛事包装,只因最纯粹的实操能力对决,吸引全球不少顶尖具身智能公司的关注。
Scientific American评价其是物理智能终极真实压力测试:
“it’s where demos die and useful robots are born.”
(Demo死在这里,实用机器人从这里诞生。)
Benjie’s Olympics的核心特质是强制泛化而非复现。
它不考察机器人对固定场景的机械复刻,只检验其在真实复杂环境中的自适应、自决策能力。
换句话说,只有真正具备泛化与触觉智能的系统,才能在比赛中存活。
在Benjie’s Olympics上,首个拿到多枚金牌的PI团队曾给出评价:
“Every task targets the hardest unsolved problems in embodiment: deformables, contact-rich manipulation, long-horizon autonomy. No other contest comes close.”
(每个任务都瞄准具身智能最难未解问题:柔性物体、高接触操作、长时序自主。没有其他比赛能比肩。)
别看只有15个比赛项目,参赛规则十分严苛,要求全自主,开始后无遥控、无人工介入、无远程修正;
无仿真,必须在真实家庭场景下操作,保证有真实光照、纹理、摩擦、噪声;
环境随机、物体也随便摆放,不可贴标记,也不可预扫描地图。完全就是闭卷裸考。
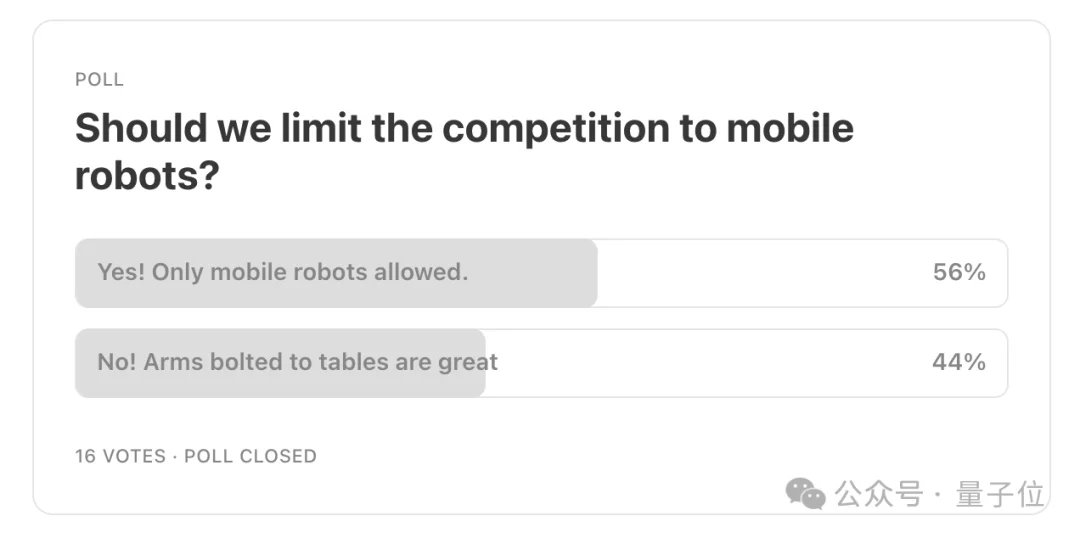
唯一让Benjie Holson拿不准的,是该不该允许“手臂固定在桌子上”的机器人参赛。
他把决定权交给网友,投票结果显而易见,只允许可移动的机器人参赛。(难度又又又加大了)
在金银铜牌的设置上,Benjie’s Olympics有一套自己的规范。
比如洗衣这个Event:“将T恤衫里外翻转折叠”是铜牌;“把袜子翻过来”是银牌;挂一件男士衬衫能拿到金牌。
对机器人指尖的考验:“卷起配对的袜子”是铜牌;“使用狗粪袋捡起便便”是银牌;“剥橙子”是金牌。
每个任务,Benjie Holson都真人示范一遍。
比赛还规定,只要参赛选手的成绩比上一个冠军的成绩至少提高25%,即可获得奖牌。
看过这15个任务的机器人专家都说,多数队伍连铜牌都过不了。

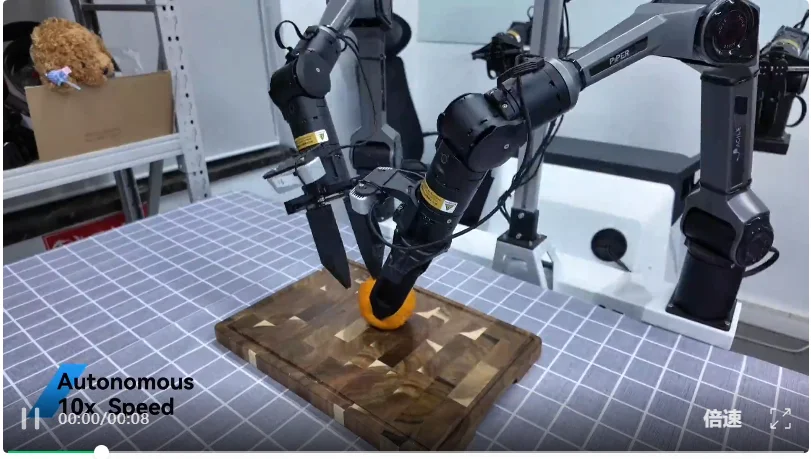
就像剥橙子这个无需任何外部工具即可完成的动作,机器人会非常棘手。
而且,橘子果皮易破、果肉易碎,这个任务难点是要求机器人精准区分果皮与果肉的细微视觉特征,实时跟踪剥制过程中的果皮形变,要求视觉感知有极高的鲁棒性。
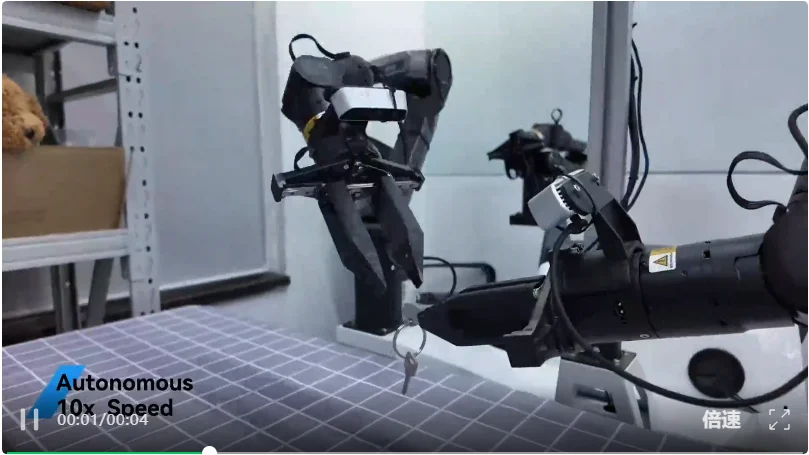
再看开锁,也是金牌难度任务。
钥匙孔为毫米级微小目标,要求机器人精准识别钥匙孔的位置、角度,同时完成钥匙的姿态理解,实现毫米级对准,还需克服光照变化、金属反光、视角偏差等多重干扰,无疑是对机器人精细操作与空间感知的双重挑战。
这两项金牌难度任务,星动纪元均打破纪录,摘得第一。

剥橙子,之前PI团队借助削皮刀工具,在2分46秒完成;这次星动纪元纯手剥,1分47秒完成,速度提升35%。
他们也成了赛事首个实现完全无工具纯手剥操作的团队。
△Benjie’s Olympics 公布星动纪元两项金牌(开锁、剥橙子)任务第一
开锁,PI团队66秒完成;星动纪元只用了49秒,速度提升25%。
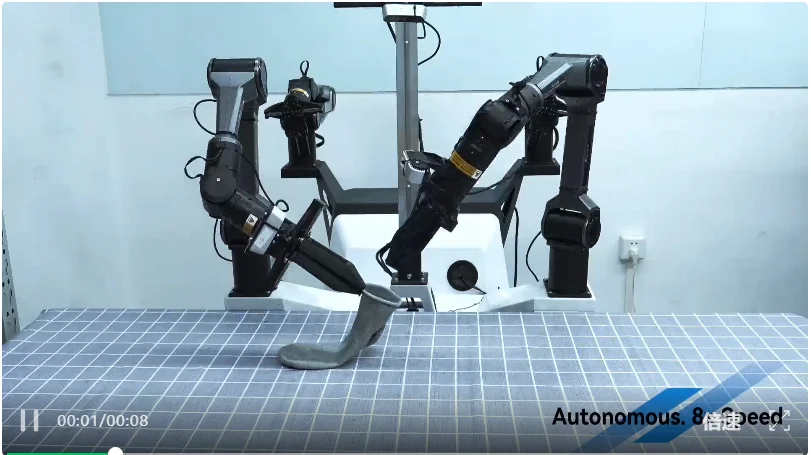
在银牌难度任务“翻袜子”中,星动纪元也战胜了PI。
作为检验模型家用泛化能力的核心标杆,翻袜子是柔性物体操作、样本泛化、效率敏感的典型场景。
袜子翻转过程中会发生复杂、无规律的形变,要求机器人实时跟踪形变,精准区分袜子的内外侧、开口位置,对视觉感知、柔性物体跟踪能力要求极高。
PI用了176个样本,1分33秒完成;星动纪元只用了120个样本,不仅样本量减少32%,翻袜子速度也比PI提升了30%。
△Benjie’s Olympics 公布星动纪元银牌任务(翻袜子)第一
这三项任务,星动纪元均是全球第一,并创下新世界纪录。
星动纪元能在如此严苛赛事中取得成绩,靠的不是运气,自研的VLA具身大模型功不可没。
该模型具备三个关键优势,没有一个是虚的,个个都能派上大用场。
第一个优势,是基础模型知识迁移能力,也就是让机器人学东西不费劲。
传统具身智能模型依赖海量训练数据,泛化能力受限。
这就好比教一个小孩认苹果,你得给他看一万张苹果的照片他才能记住。换一种光线、换一种颜色的苹果,他可能又不认得了。
而星动纪元依托强大的知识迁移能力,大幅优化数据利用率。
他们先教会小孩“什么是水果”这个概念,再让他去认苹果、橘子、香蕉,这样就快多了。
单说翻袜子这个任务,星动纪元只用了120组训练样本,就比另一支团队用176组样本做得还要好。
这意味着机器人能很快适应新场景,研发成本和耗费时间都大大降低。
第二个优势,是让机器人看得更清楚,尤其是那些小东西。
一个会移动的机器人,它的“眼睛”(摄像头)是跟着身体一起动的。靠近目标的时候,角度在变、距离在变,传统的方法很容易“看花眼”。
星动纪元的模型引入了自适应视觉注意力机制。
名字很长,但原理很简单:自动盯着钥匙、锁孔、果皮这类细小又关键的东西看,自动把它们看得更清楚、特征更突出,就算环境很乱、机器人底盘轻微晃动,也能精准识别。
第三个优势,是让机器人反应变快,手还很稳。
传统模型的工作方式是“做完一步,再看下一步”,模型单次生成超1秒的运动轨迹,响应慢、误差易累积。
比如,翻袜子过程中袜子突然变形了,等机器人想完下一步怎么做,袜子已经滑到别处去了。
星动纪元采用异步高频推理与短时域规划策略,可在当前轨迹未完成时,同步预测下一段运动轨迹,生成后立即切换执行。
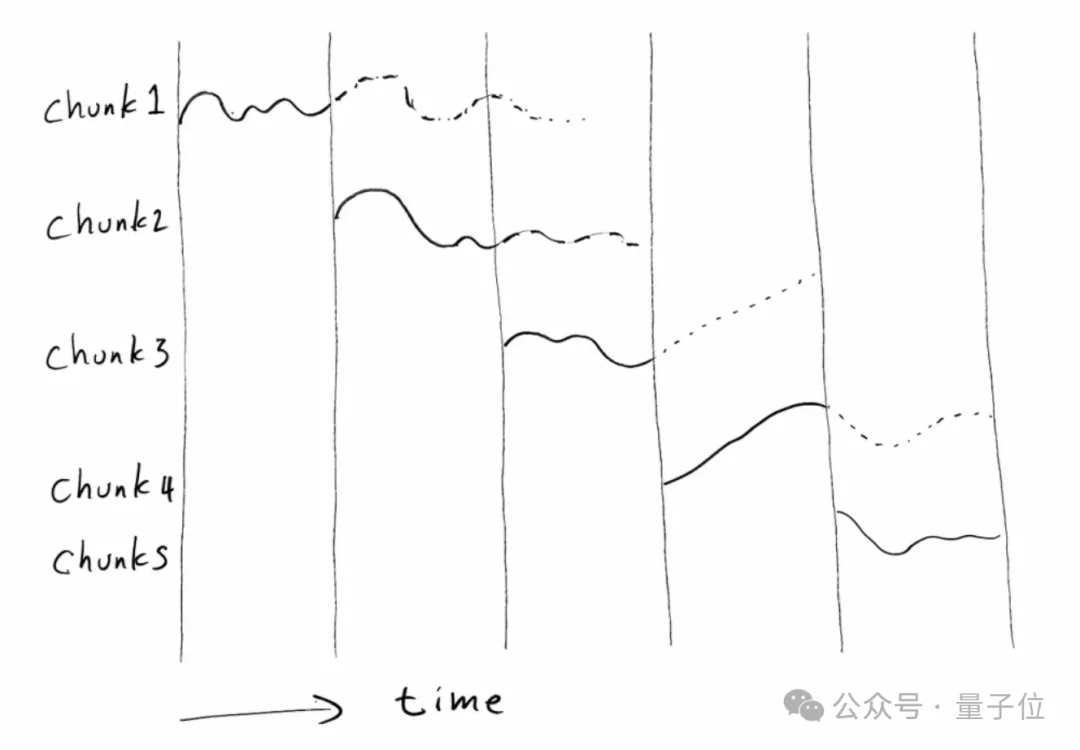
如图所示,机器人的一个关节沿着Chunk 1的路径运动,直到Chunk 2出现的垂直线,然后你开始沿着该路径运动,直到Chunk 3出现,依此类推。
这样一来,每条路径的最后一段其实用不上,因为新的路径总会提前出现,机器人直接切换过去就行。
简单来说,机器人在做当前动作的同时,大脑已经在预判下一步、下下一步该怎么走了。
一旦新的路径算出来,机器人立刻切换过去,中间不等待。每条规划的路其实最后一段都用不上,因为新的路总会提前出现。规划得越频繁,机器人就越灵敏。
所以在翻袜子这种袜子不断变形的任务里,星动纪元的机器人能快速调整动作,重新找到袜口,一气呵成。
这三项改进加在一起,效果就更明显了。
星动纪元的机器人不仅眼看得清,手指灵活,还可以理解工具怎么用,双手协同干活,甚至能完成多步骤、需要长时间规划的任务。
正是这套全自研的VLA具身模型,让星动纪元在“只允许移动机器人参赛”这条硬规则下,不仅没有吃亏,反而把移动带来的动态不确定性,变成了自己的护城河。
这不是星动纪元第一次屠榜了。
2025年10月,星动纪元创始人陈建宇与斯坦福大学Chelsea Finn(PI联合创始人)团队研发了Ctrl-World可控生成世界模型。
该模型在全球具身智能顶级世界模型权威评测WorldArena榜单中,超越谷歌、英伟达,斩获具身任务全球第一。
2026年2月,双方再次联合提出VLAW框架,首次实现VLA策略与动作条件世界模型的协同迭代优化。星动纪元也成了唯一和PI两次合作的中国具身公司。
陈建宇对端到端VLA范式有多坚持呢?

2020年从加州大学伯克利博士毕业后,陈建宇回到母校清华大学,担任交叉信息研究院助理教授,28岁成为清华博导,2023年创办星动纪元。
2024年9月,星动纪元成为全球首个提出分频VLA的团队,PI、Figure、Google、NVIDIA都得排在它后面。
同年12月,该公司发布融合世界模型的VLA算法框架Video Prediction Policy(现已开源)。
2025年,星动纪元自研的ERA-42端到端VLA具身大模型,实现了对全尺寸双足人形机器人全身及五指灵巧手的精准控制,成为全球仅有的四家能做到这一点的公司之一。
技术的终极价值,在于实用。
赛场之外,星动纪元的VLA具身大模型已在多个领域落地。
物流方面,其与顺丰合作;在制造业方面,与吉利、北汽合作;在商业服务、家庭服务领域,已与海尔、联想、世纪金源等企业达成合作。

在今年中关村论坛亮相的智能分拣机器人,就是星动纪元真干活机器人的代表。
日常工作中,它不仅能完成药品、日化品、包裹的分拣及扫码,还能完成“零部件抓取-高精度装配-质量检测”等制造业场景的任务。
在商业服务领域,星动纪元的机器人负责门店客座清洁、物品递送、导游导览等工作。其中,部分场景效率当前达到70%~80%。
星动纪元做的事倒是很符合Benjie’s Olympics赛事的初衷:让有用的机器人在这里诞生,让只活在Demo里的技术永远死去。
当越来越多的玩家从炫技转向实用,会发现在机器人这场长跑里,真正的对手从来不是别人,而是那个人类习以为常、机器却步履蹒跚的物理世界。
文章来自于"量子位",作者 "田晏林"。


