# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
在具身智能快速发展的今天,高质量数据已成为驱动能力提升的关键基础,然而一个核心问题也随之而来:
如何让机器人数据采集更快、更稳、更有效?
港大联合复旦、上交大近期提出的TAMEn(Tactile-Aware Manipulation Engine for Closed-Loop Data Collection in Contact-Rich Tasks)给出的核心答案是:
在UMI框架基础上做了全方位升级——不是只给一个采集设备或训练代码,而是构建了视触感知融合+精度与便携兼顾+数据可靠性增强+持续进化的数据闭环。
从数据采集、策略训练,到部署纠错、再训练,整条链路被打通,让机器人学得更快、更准、更高效。
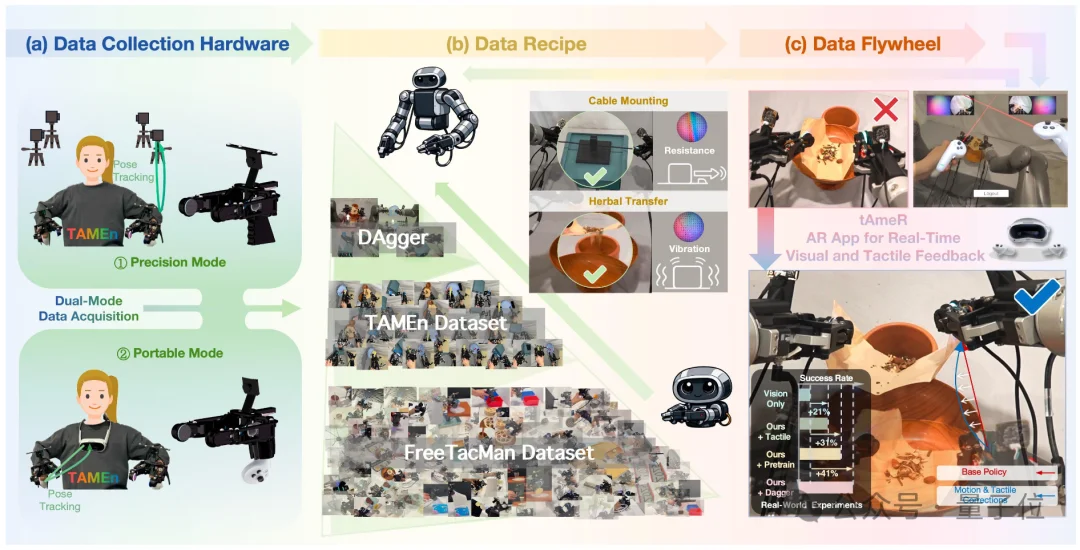
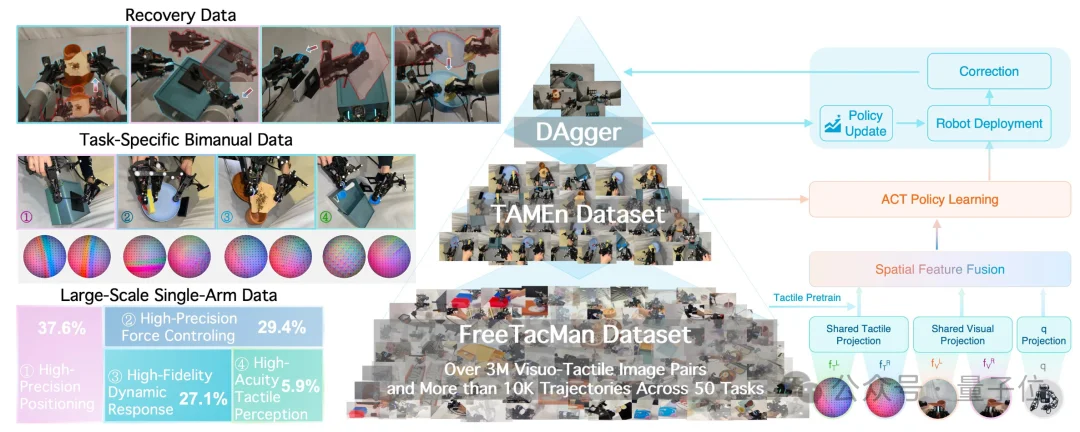
上图对应TAMEN的三层闭环:
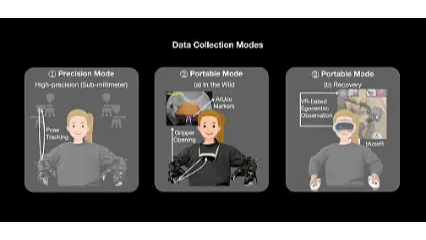
1. Data Collection Hardware(数采硬件层):数采设备、传感器、灵活兼容的采集方式。
2. Data Recipe(人在环数据层):在线可行性检查,数据金字塔体系。
3. Data Flywheel(价值推理与训练层):AR触觉反馈遥操作、介入纠错、闭环采集。
三者串联,形成了真实场景中的“数采-训练-部署-纠错-再训练”持续迭代闭环。
可行性在线验证:
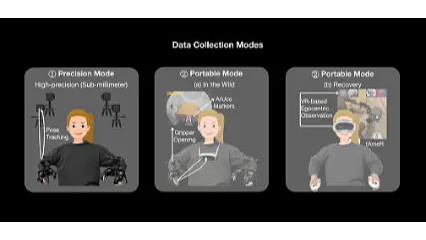
双模式数据采集:
持续进化闭环:
金字塔式数据体系:
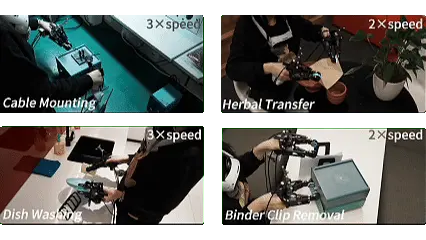
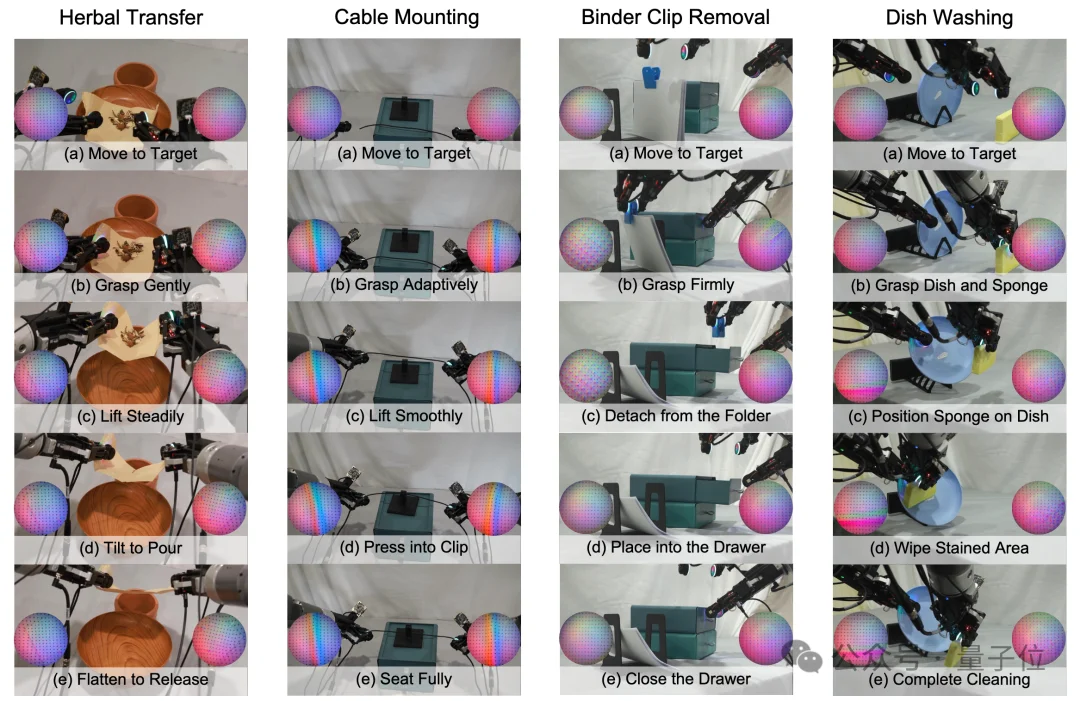
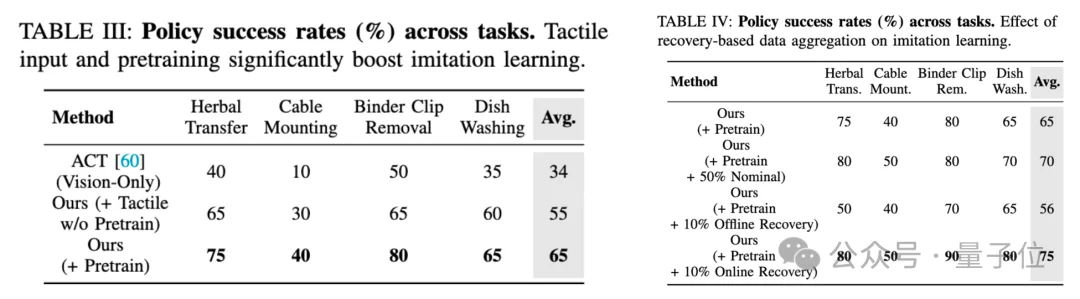
在多项双臂协作任务中,TAMEn将平均成功率从34%提升至75%,这些任务并非简单堆叠,而是覆盖了接触丰富操作中的几类典型难点:从中草药倾倒中对可变形物体的协调控制,到线缆装配中的柔性物体的适应性抓握与插入判断,再到弹簧夹收纳中的多阶段协同时序配合,以及擦盘子中的持续接触。
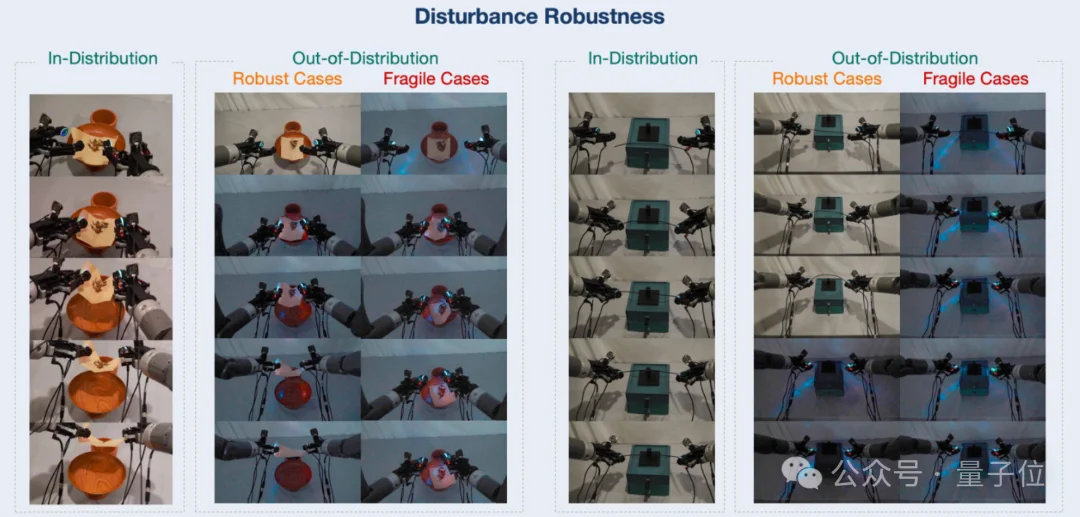
触觉输入、预训练和闭环纠错三者分别带来持续性能提升,且提高泛化性与鲁棒性。这标志着机器人数据采集正从“可用”迈向“可持续优化”的新阶段。

TAMEn,让机器人不再“盲操作”,而是“有触觉、可进化”的协作伙伴。
项目主页:
https://opendrivelab.com/TAMEn
论文:
https://arxiv.org/abs/2604.07335
Github:
https://github.com/OpenDriveLab/TAMEn
文章来自于"量子位",作者 "TAMEn团队"。


【开源免费】XTuner 是一个高效、灵活、全能的轻量化大模型微调工具库。它帮助开发者提供一个简单易用的平台,可以对大语言模型(LLM)和多模态图文模型(VLM)进行预训练和轻量级微调。XTuner 支持多种微调算法,如 QLoRA、LoRA 和全量参数微调。
项目地址:https://github.com/InternLM/xtuner
