
真没招了!Claude撞碎创业梦,华人博士推出开源版Claude Cowork产品Eigent
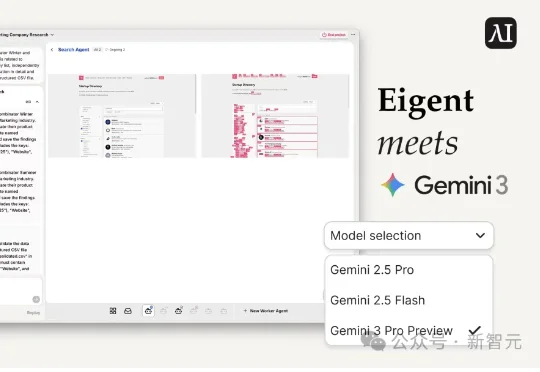
真没招了!Claude撞碎创业梦,华人博士推出开源版Claude Cowork产品EigentClaude Cowork一出,直接砸碎了Guohao Li的创业梦,华人学者反手把分布式多智能体项目全开源!代码朋克的怒火,已点燃整个AI社区。下一代Agent的战争,就此打响。
来自主题: AI资讯
10046 点击 2026-01-16 11:31
Claude Cowork一出,直接砸碎了Guohao Li的创业梦,华人学者反手把分布式多智能体项目全开源!代码朋克的怒火,已点燃整个AI社区。下一代Agent的战争,就此打响。
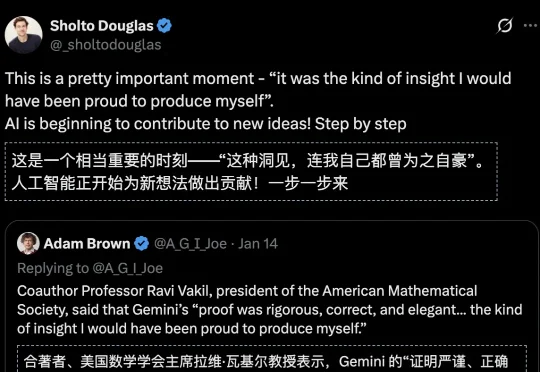
数学奇点初现!Gemini攻克全新数学定理,斯坦福大牛惊呼「想出来能吹一辈子」;陶哲轩预言数学家+AI共生未来;Grok发现黎曼猜想新的隐蔽通道……
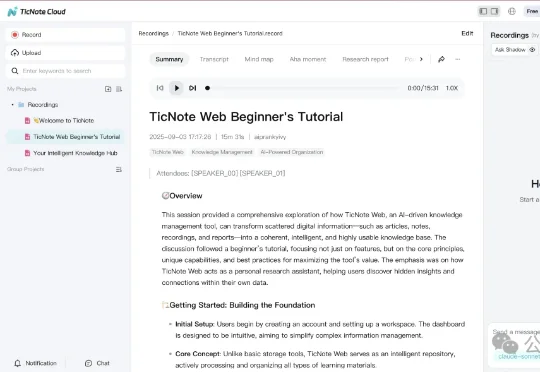
2026年真正爆点,必将是「超级组织」崛起。AI开始进入团队重写工作流,自动执行共享记忆,与团队协同让效率原地起飞。你的下一位同事,可能是AI。
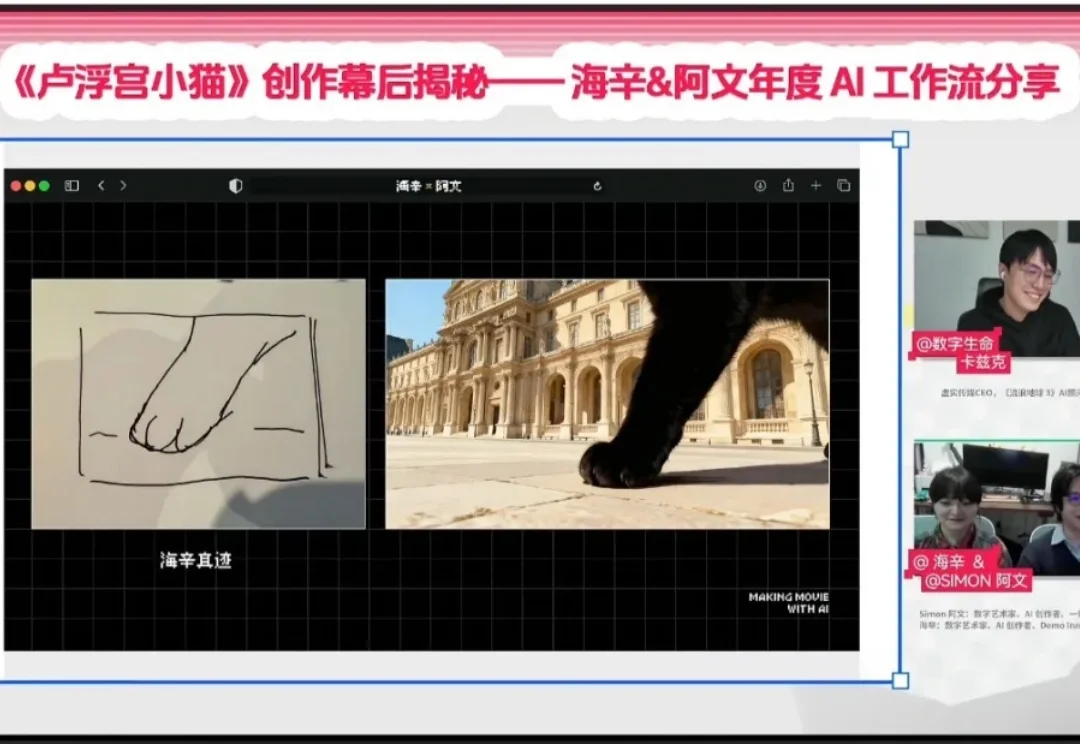
昨晚,超级超级开心的邀请了我的两位好朋友、也是我的两位偶像海辛和阿文,来我的视频号做了一场直播。

o1从榜首暴跌至#56,Claude 3 Opus坠入#139。LMSYS榜单揭示残酷真相:大模型的「霸主保质期」只有35天!这不是技术迭代,这是对所有应用层开发者的降维屠杀。
这是一个拥有23.7k star的Skills开源项目。支持一键部署在Claude code、Codex以及最近非常火的Opencode。

“卡买回来了,然后呢?”
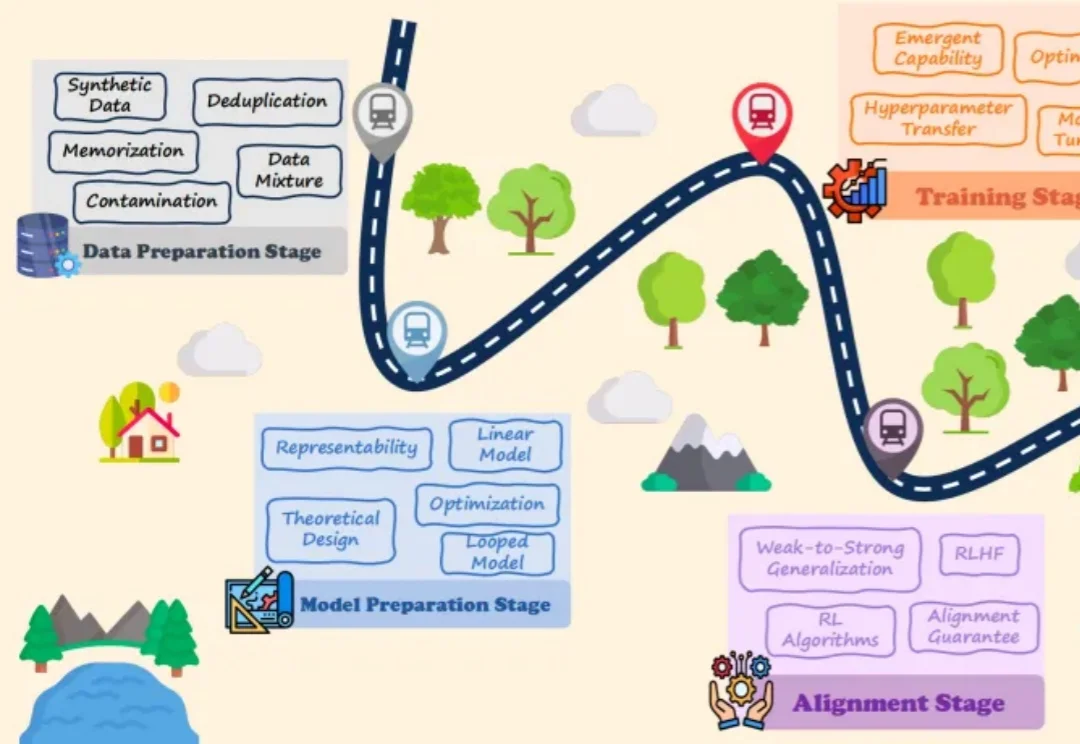
大语言模型(LLMs)的爆发式增长引领了人工智能领域的范式转移,取得了巨大的工程成功。然而,一个关键的悖论依然存在:尽管 LLMs 在实践中表现卓越,但其理论研究仍处于起步阶段,导致这些系统在很大程度上被视为难以捉摸的「黑盒」。

谷歌Veo 3.1又双叒升级了!
2026 年 1 月过半,我们依然没有等来 DeepSeek V4,但它的模样已经愈发清晰。