
RSS 2026|机器人别等失败了才补救,AgentChord让恢复动作提前写进任务图
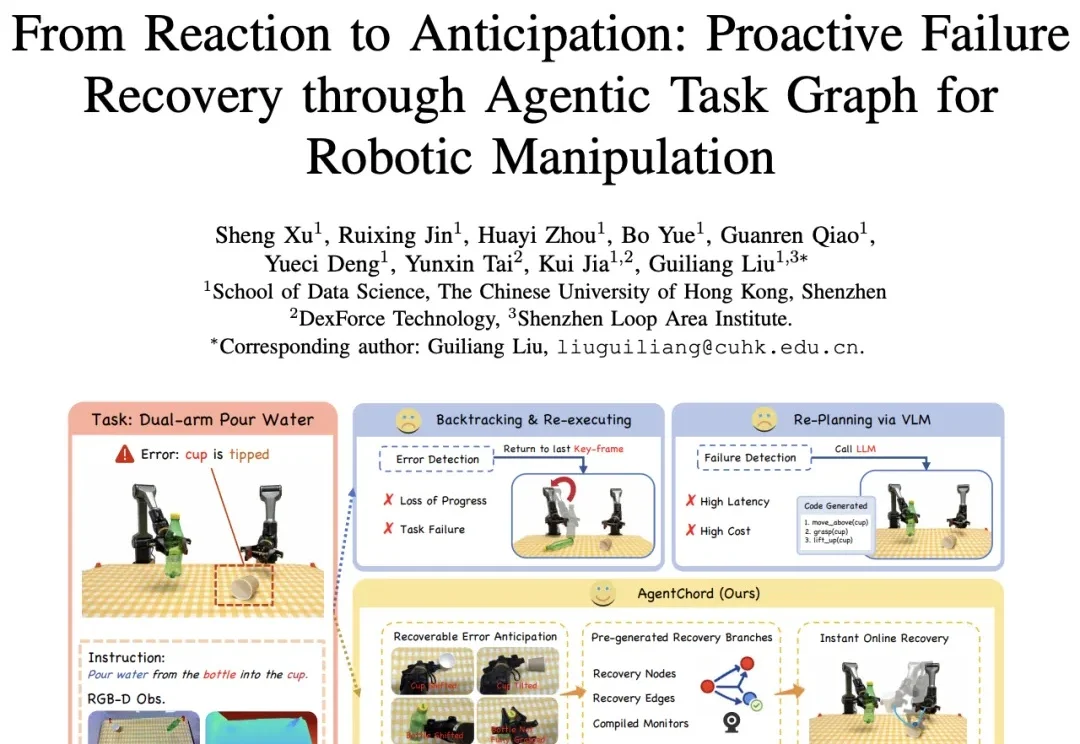
RSS 2026|机器人别等失败了才补救,AgentChord让恢复动作提前写进任务图机器人操作正在从结构化工业场景走向更开放的真实环境。相比完成单个预设动作,真实任务往往包含更长的执行链条、更复杂的物体交互,以及更多不可控的外部扰动。一次抓取没有完全夹稳、目标物体被轻微碰偏、双臂交接时姿态出现偏差,都可能让后续步骤偏离原本计划。
来自主题: AI技术研报
7875 点击 2026-05-25 09:46