单条演示即可抓取一切:北大团队突破通用抓取,适配所有灵巧手本体
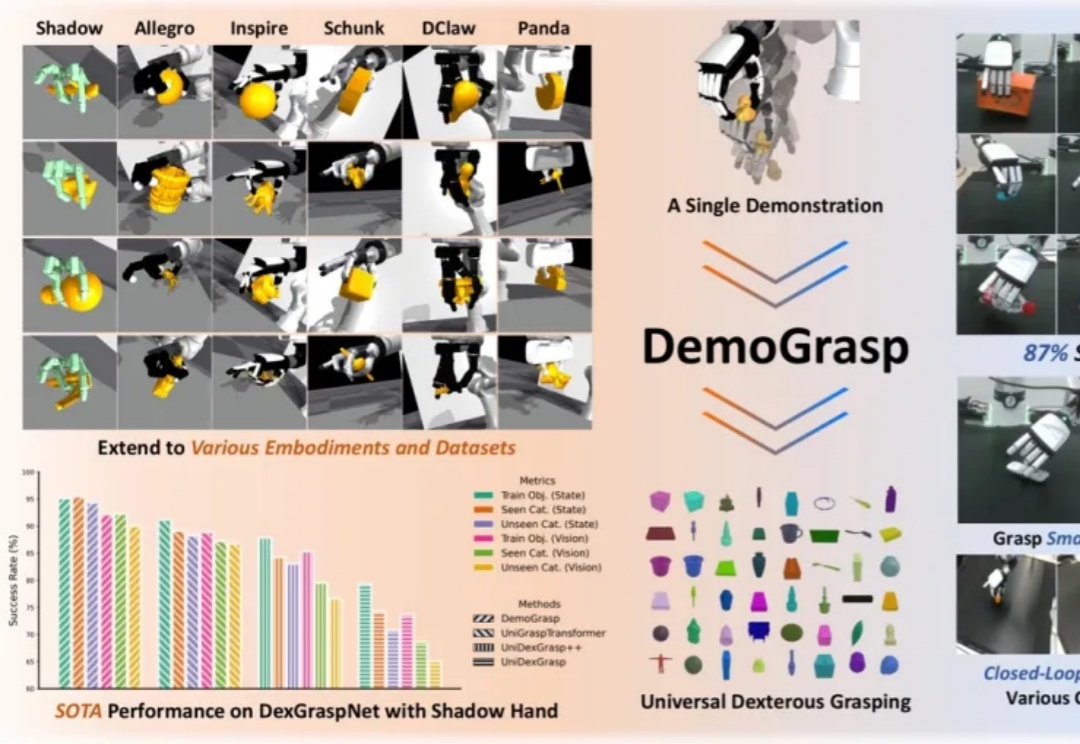
单条演示即可抓取一切:北大团队突破通用抓取,适配所有灵巧手本体在灵巧手通用抓取的研究中,由于动作空间维度高、任务具有长程探索特征且涉及多样化物体,传统强化学习(RL)面临探索效率低、奖励函数及训练过程设计复杂等挑战。
来自主题: AI技术研报
6994 点击 2025-10-30 10:26
 搜索
搜索
在灵巧手通用抓取的研究中,由于动作空间维度高、任务具有长程探索特征且涉及多样化物体,传统强化学习(RL)面临探索效率低、奖励函数及训练过程设计复杂等挑战。