小红书,再造一个更有「声」命力的社区
小红书,再造一个更有「声」命力的社区2026 马年注定迎来一个「AI 味」最浓的春节。
来自主题: AI技术研报
10204 点击 2026-02-12 15:34
 搜索
搜索
2026 马年注定迎来一个「AI 味」最浓的春节。
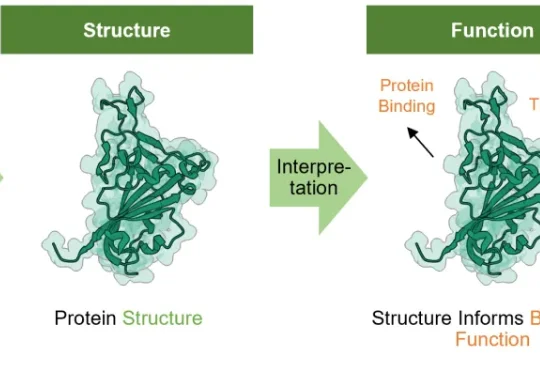
在生物基石模型的全球激烈竞逐中,IntelliGen AI 于本周末正式发布了 IntelliFold 2,这是继 2025 年 7 月 IntelliFold 首版发布后的一次重大升级 [2]。

Google DeepMind 已于本月初向员工宣布了 Silver 的离职消息。Silver 在离职前的几个月里一直处于休假状态,并未正式返回 DeepMind 工作岗位。Google DeepMind 的一位发言人在电子邮件声明中证实了 Silver 离职的信息,表示:「Dave 的贡献是无价的,我们非常感谢他对 Google DeepMind 工作所做出的贡献。」
离开Meta这座围城后,Yann LeCun似乎悟了“不要把鸡蛋装在同一个篮子里”。一边,他亲手打造了自己的初创公司AMI,试图在世界模型这条赛道上大展拳脚;同时,他的目光又投向了硅谷的另一角。

大模型的出现,给许多行业带来了颠覆性的改变,运维这个向来被视为稳定、保守的领域也不例外。虽然“AIOps”这个概念早在 2016 年由 Gartner 提出,但早期的智能运维更多是利用大数据和机器学习对传统运维流程进行效率上的提升。

新公司名为Advanced Machine Intelligence(AMI),也就是先进机器智能,法语里意为“朋友”。总部位于巴黎,并将在纽约、蒙特利尔、新加坡等地分别设立运营机构。而且和硅谷最近的闭源趋势不同,AMI all in开源。

究竟是什么样的更新,才能让谷歌CEO皮查伊称之为“众望所归”(Answering a top request from our users)?
胡宇航(网名 “U 航”),毕业于美国哥伦比亚大学,博士学位,首形科技创始人。长期专注于机器人自主学习的研究工作。研究成果发表于《Nature Machine Intelligence》,《Science Robotics》等国际顶级期刊。
谷歌正式发布了由最新Gemini3模型驱动的“Personal Intelligence”功能。它将谷歌旗下四大应用的数据池进行了底层连接,让AI获得了跨应用权限。

一觉醒来,你的 iPhone 即将用上最强 AI 了。就在刚刚,苹果和 Google 发布联合声明,双方达成达成多年深度合作协议。下一代「苹果基础模型」将直接基于 Google 的 Gemini 模型和云技术构建。