
机器人空间泛化也有Scaling Law!清华新国大新算法框架让机器人操作更加鲁棒
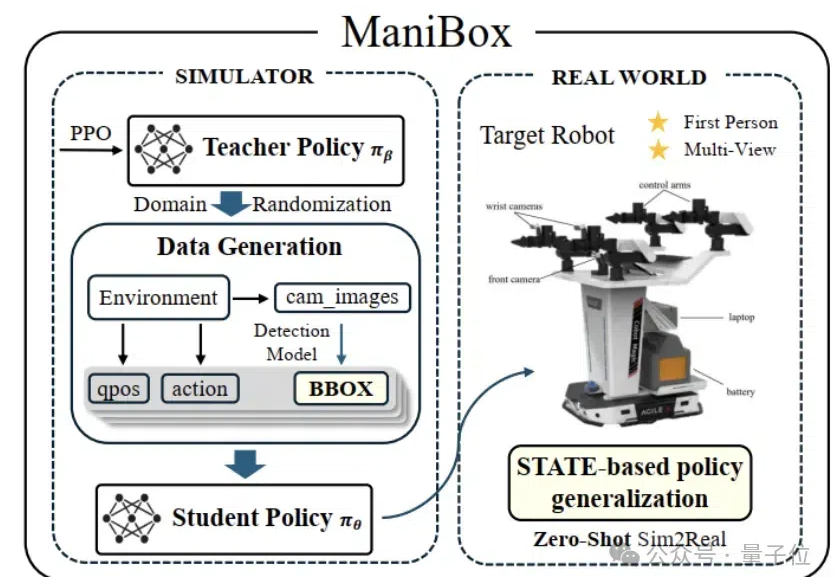
机器人空间泛化也有Scaling Law!清华新国大新算法框架让机器人操作更加鲁棒在机器人空间泛化领域,原来也有一套Scaling Law! 来自清华和新加坡国立大学的团队,发现了空间智能的泛化性规律。 在此基础上,他们提出了一套新颖的算法框架——ManiBox,让机器人能够在真实世界中应对多样化的物体位置和复杂的场景布置。
来自主题: AI技术研报
7990 点击 2024-12-29 17:33