前馈式3D的终极路线图来了!五大核心战线,一文看清未来三维重建该往哪走
前馈式3D的终极路线图来了!五大核心战线,一文看清未来三维重建该往哪走从单幅图像恢复三维结构,到多视图场景建模、动态 4D 重建,再到机器人、自动驾驶、SLAM 与视频生成,如何让模型在不依赖逐场景优化的前提下,直接、高效地理解并重建三维世界,正在成为 3D 视觉领域的
来自主题: AI技术研报
9549 点击 2026-04-26 12:09
 搜索
搜索
从单幅图像恢复三维结构,到多视图场景建模、动态 4D 重建,再到机器人、自动驾驶、SLAM 与视频生成,如何让模型在不依赖逐场景优化的前提下,直接、高效地理解并重建三维世界,正在成为 3D 视觉领域的

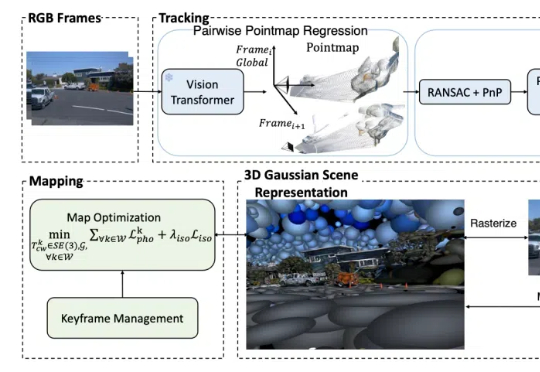
SLAM教父罕见公开点赞!中国队开源的LingBot-Map,仅靠普通摄像头实现万帧流式3D重建,在全网引爆120万人围观。

SLAM 在自动驾驶、机器人、AR/VR 乃至具身智能系统中都是至关重要的环节,它决定了算法能否在一个陌生环境中一边“看懂世界”,一边“知道自己在哪”。

在一场矿难救援中,时间意味着生命。想象一台搜救机器人在部分坍塌的矿井中穿行:浓烟、碎石、扭曲的金属梁。它必须在险象环生的环境中迅速绘制地图,识别路径,并精准定位自己的位置。
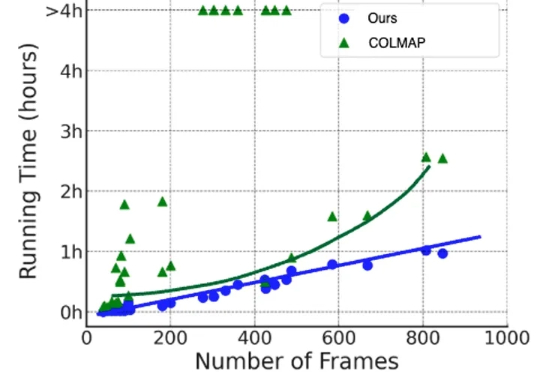
在三维重建、NeRF 训练、视频生成等任务中,相机参数是不可或缺的先验信息。传统的 SfM/SLAM 方法(如 COLMAP)在静态场景下表现优异,但在存在人车运动、物体遮挡的动态场景中往往力不从心,并且依赖额外的运动掩码、深度或点云信息,使用门槛较高,而且效率低下。
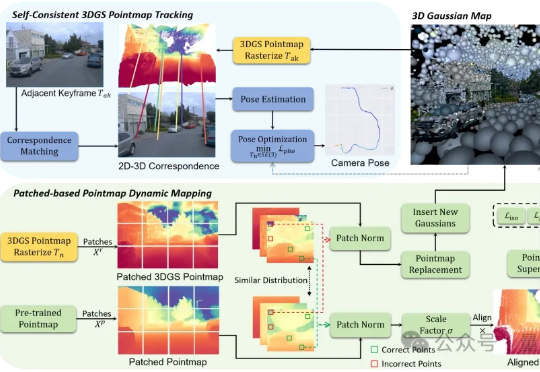
户外SLAM的尺度漂移问题,终于有了新解法! 香港科技大学(广州)的研究的最新成果:S3PO-GS,一个专门针对户外单目SLAM的3D高斯框架,已被ICCV 2025接收。
从自动驾驶、机器人导航,到AR/VR等前沿应用,SLAM都是离不开的核心技术之一。
视觉 / 激光雷达里程计是计算机视觉和机器人学领域中的一项基本任务,用于估计两幅连续图像或点云之间的相对位姿变换。它被广泛应用于自动驾驶、SLAM、控制导航等领域。最近,多模态里程计越来越受到关注,因为它可以利用不同模态的互补信息,并对非对称传感器退化具有很强的鲁棒性。