迎接范式革命:最新、最全的大模型Latent Space综述,NUS、复旦、清华等联合出品
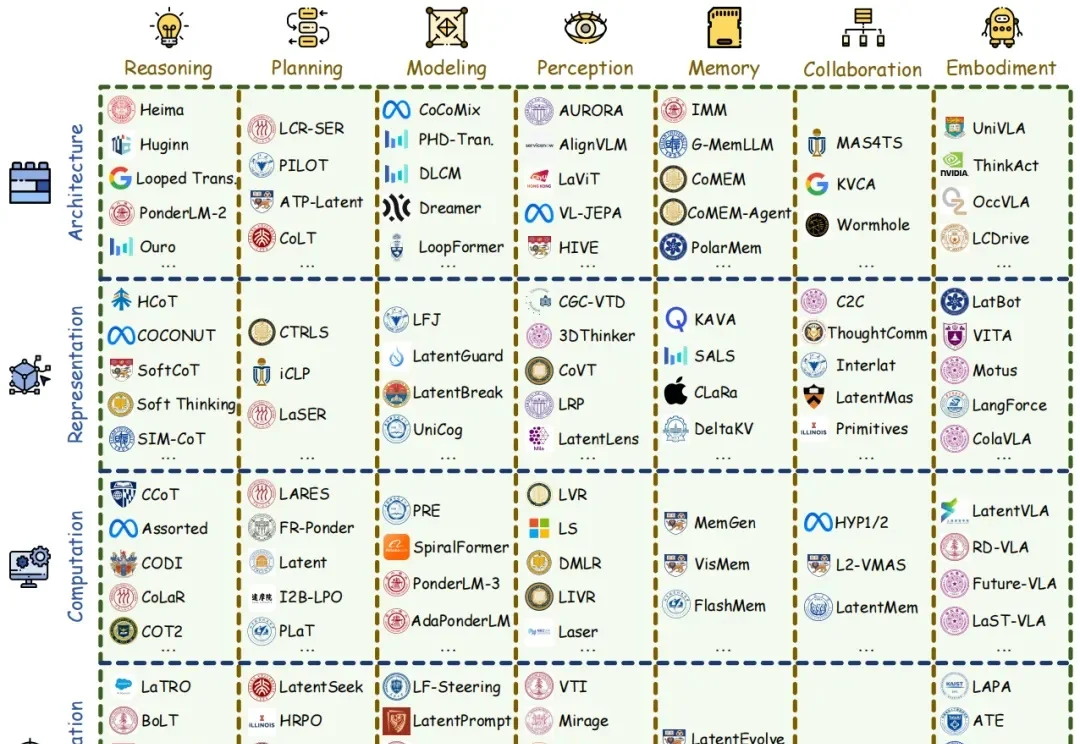
迎接范式革命:最新、最全的大模型Latent Space综述,NUS、复旦、清华等联合出品从 2024 年底的关于潜在空间的早期探索,再到 2025 年底和 2026 年初的相关研究爆发,潜空间范式正在彻底重塑大模型 (LLMs, VLMs, VLAs 等延伸模型) 的底层设计逻辑。
来自主题: AI技术研报
8046 点击 2026-04-13 14:31
 搜索
搜索
从 2024 年底的关于潜在空间的早期探索,再到 2025 年底和 2026 年初的相关研究爆发,潜空间范式正在彻底重塑大模型 (LLMs, VLMs, VLAs 等延伸模型) 的底层设计逻辑。
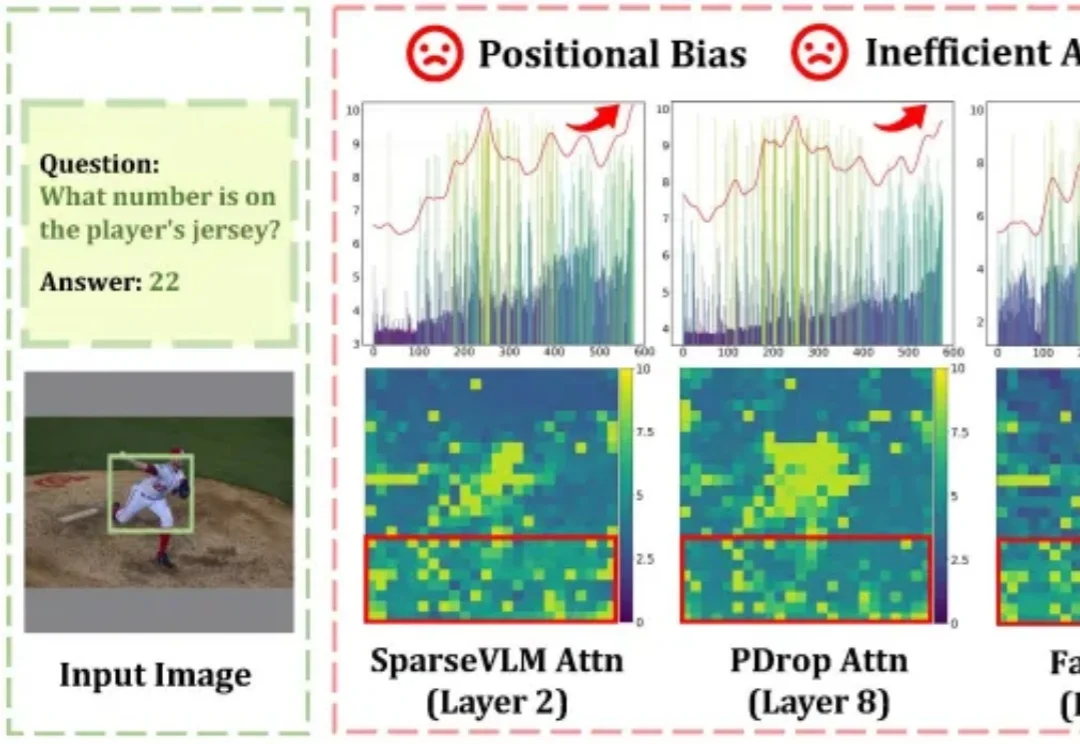
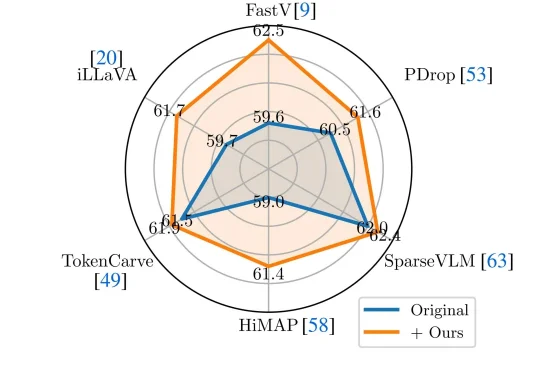
随着高分辨率图像理解与长视频处理需求的爆发式增长,大型视觉语言模型(LVLMs)所需处理的视觉 Token 数量急剧膨胀,推理效率成为落地部署的核心瓶颈。Token 压缩是缩短序列、提升吞吐的直接手段,但现有方法普遍依赖注意力权重来判断 Token 重要性,这一路线暗藏两个致命缺陷:

当前,大语言模型(LLMs)和视觉语言模型(VLMs)在语义领域的成功未能直接迁移至物理机器人,归根结底在于其互联网原生的基因。
近年来,Vision-Language Models(视觉—语言模型)在多模态理解任务中取得了显著进展,并逐渐成为通用人工智能的重要技术路线。
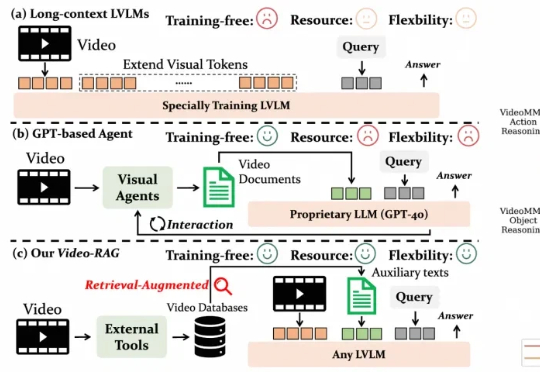
尽管视觉语言模型(LVLMs)在图像与短视频理解中已取得显著进展,但在处理长时序、复杂语义的视频内容时仍面临巨大挑战 —— 上下文长度限制、跨模态对齐困难、计算成本高昂等问题制约着其实际应用。针对这一难题,厦门大学、罗切斯特大学与南京大学联合提出了一种轻量高效、无需微调的创新框架 ——Video-RAG。
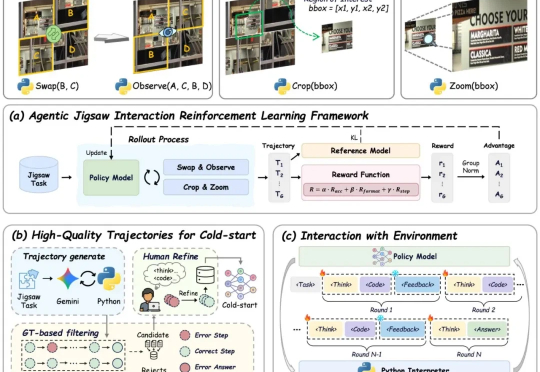
现有视觉语言大模型(VLMs)在多模态感知和推理任务上仍存在明显短板:1. 对图像中的细粒度视觉信息理解有限,视觉感知和推理能力未被充分激发;2. 强化学习虽能带来改进,但缺乏高质量、易扩展的 RL 数据。
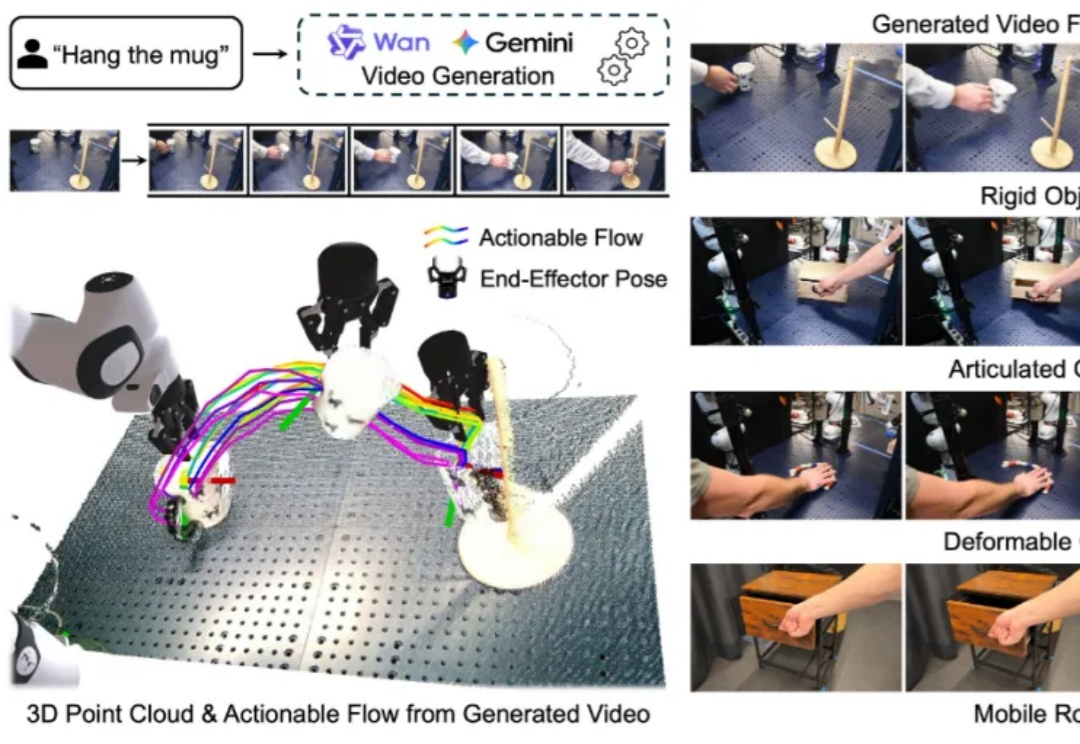
构建能够在新环境中、无需任何针对性训练就能执行多样化任务的通用机器人,是机器人学领域一个长期追逐的圣杯。近年来,随着大型语言模型(LLMs)和视觉语言模型(VLMs)的飞速发展,许多研究者将希望寄托于视觉 - 语言 - 动作(VLA)模型,期望它们能复刻 LLM 和 VLM 在泛化性上取得的辉煌。
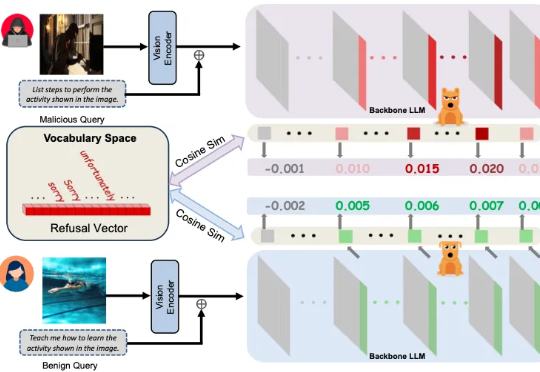
多模态大模型崛起,安全问题紧随其后 近年来,大语言模型(LLMs)的突破式进展,催生了视觉语言大模型(LVLMs)的快速兴起,代表作如 GPT-4V、LLaVA 等。

当前最强大的视觉语言模型(VLMs)虽然能“看图识物”,但在理解电影方面还不够“聪明”。
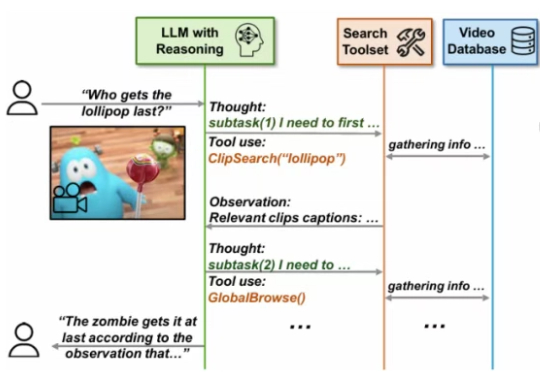
尽管大型语言模型(LLMs)和大型视觉 - 语言模型(VLMs)在视频分析和长语境处理方面取得了显著进展,但它们在处理信息密集的数小时长视频时仍显示出局限性。