
人形机器人不再「走走停停」:Current Robotics发布全身灵巧操作模型Curr-0
人形机器人不再「走走停停」:Current Robotics发布全身灵巧操作模型Curr-0让人形机器人在移动中完成精细操作,一直是具身智能领域没有被很好解决的问题。
来自主题: AI资讯
8655 点击 2026-06-19 10:46
 搜索
搜索
让人形机器人在移动中完成精细操作,一直是具身智能领域没有被很好解决的问题。
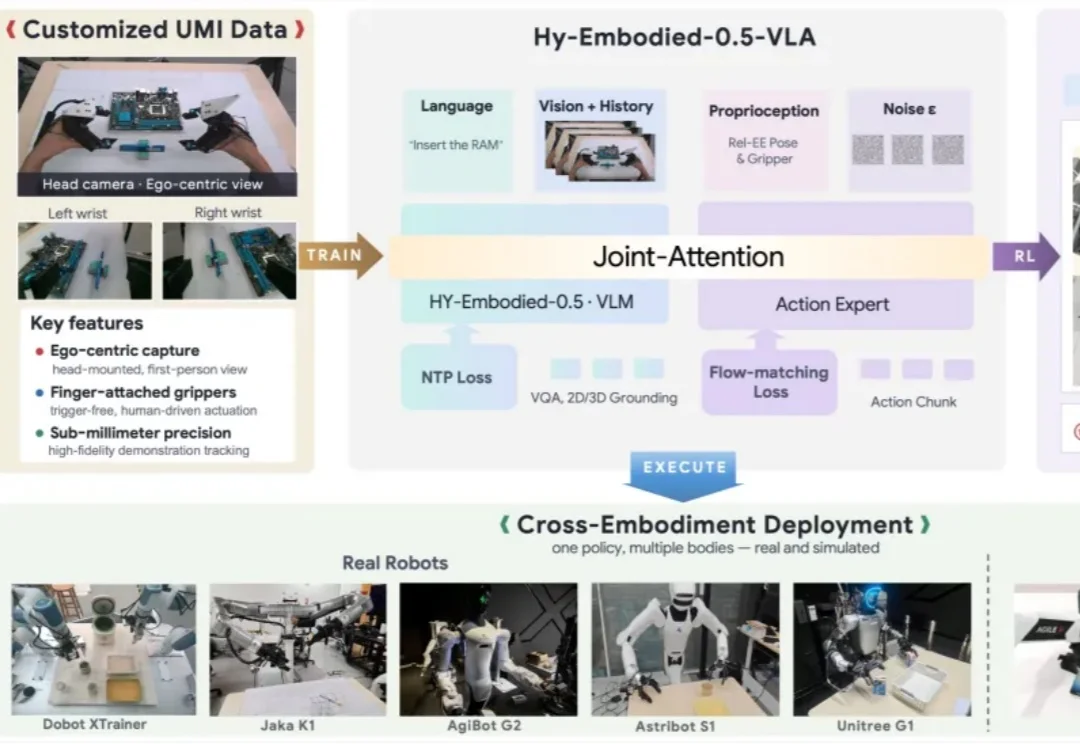
6 月 15 日,腾讯 Robotics X、福田实验室与混元团队联合发布面向真实世界机器人操作任务的端到端具身智能模型 Hy-Embodied-0.5-VLA(简称 HyVLA-0.5)。

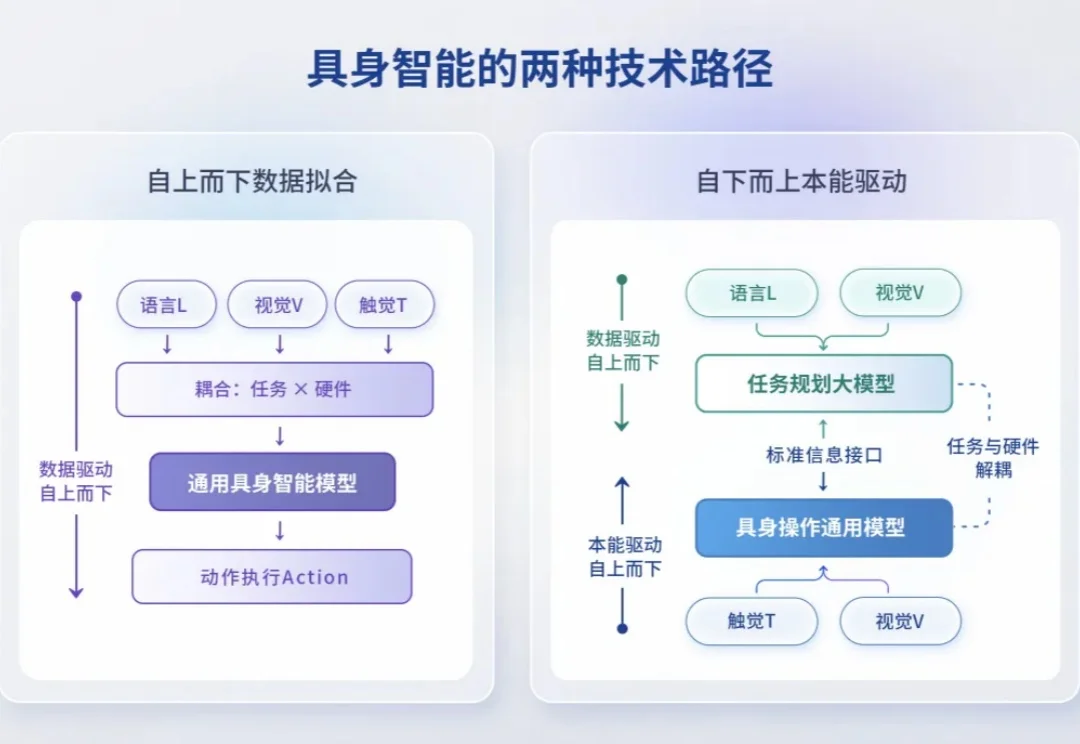
过去一年,具身智能行业最热闹的画面是什么?

6月8日,高德重磅发布了全球首个3D原生城市世界模型——ABot-Earth0.5。ABot-Earth0.5的发布不仅宣告着城市级场景3D原生技术的重要突破,更彻底重塑了传统3D建模的生产逻辑与成本结构。

奇点灵智做了一款支持 Vibe Coding 的儿童硬件。 产品叫多奇 AI 小外教机器人,面向 3-8 岁孩子。今年 1 月在京东首发,首发期间产品进入京东榜单 Top 2,目前全平台订单超过 2
具身智能公司戴盟机器人(Daimon Robotics)新近完成亿元A轮融资,本轮融资由汇川产投和中国电信联合投资。与此同时量子位还获悉了关于这家公司的另一则消息——阿里通义实验室前多模态研究专家原玮浩加入戴盟,担任首席AI科学家。

今日(6月3日)绳驱AI机器人公司星尘智能(Astribot)完成B轮系列融资——三个月内连续完成3轮融资,融资总额超10亿元,估值突破百亿元,跻身中国具身智能第一梯队。
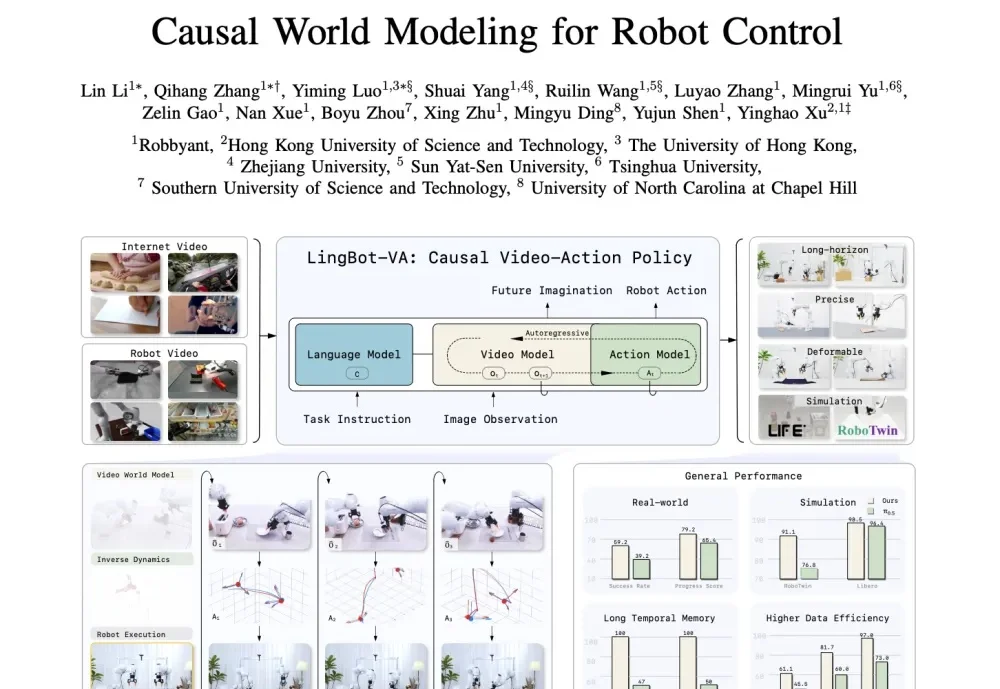
赋予机器人物理理解和预测能力是通用操作的关键。蚂蚁灵波等机构提出的 LingBot-VA 试图将视频帧预测与动作推理统一起来,让机器人通过自回归扩散框架学会“一边思考一边行动”。

独家获悉,字节跳动多模态负责人周畅管理范围再次扩大,原由李航负责的 Seed Robotics 团队已向周畅汇报月余,李航现以顾问身份负责学术合作方向。字节也正在招聘具身智能技术负责人,负责机器人业务整体规划,职级定位为 L8,对标阿里 P10-P11,将向周畅汇报。该岗位候选人主要来自头部具身智能创业公司技术负责人。
这是第一次,机器人学会了用手「盘」: