

具身智能的数据难题,终于有了可规模化的解法
具身智能的数据难题,终于有了可规模化的解法科技赛道从不缺“造梦者”,但能精准击中行业痛点的“破局者”往往寥寥。
来自主题: AI技术研报
7152 点击 2025-12-18 16:24
科技赛道从不缺“造梦者”,但能精准击中行业痛点的“破局者”往往寥寥。

他们不光能造GPU,还能写出全球顶级的算法!摩尔线程这次开源给国产具身智能递了一把「神兵利器」。

资本仍在密集涌入的具身智能行业,驱动力究竟是什么?

生成式模型正在成为机器人和具身智能领域的重要范式,它能够从高维视觉观测中直接生成复杂、灵活的动作策略,在操作、抓取等任务中表现亮眼。但在真实系统中,这类方法仍面临两大「硬伤」:一是训练极度依赖大规模演示数据,二是推理阶段需要大量迭代,动作生成太慢,难以实时控制。
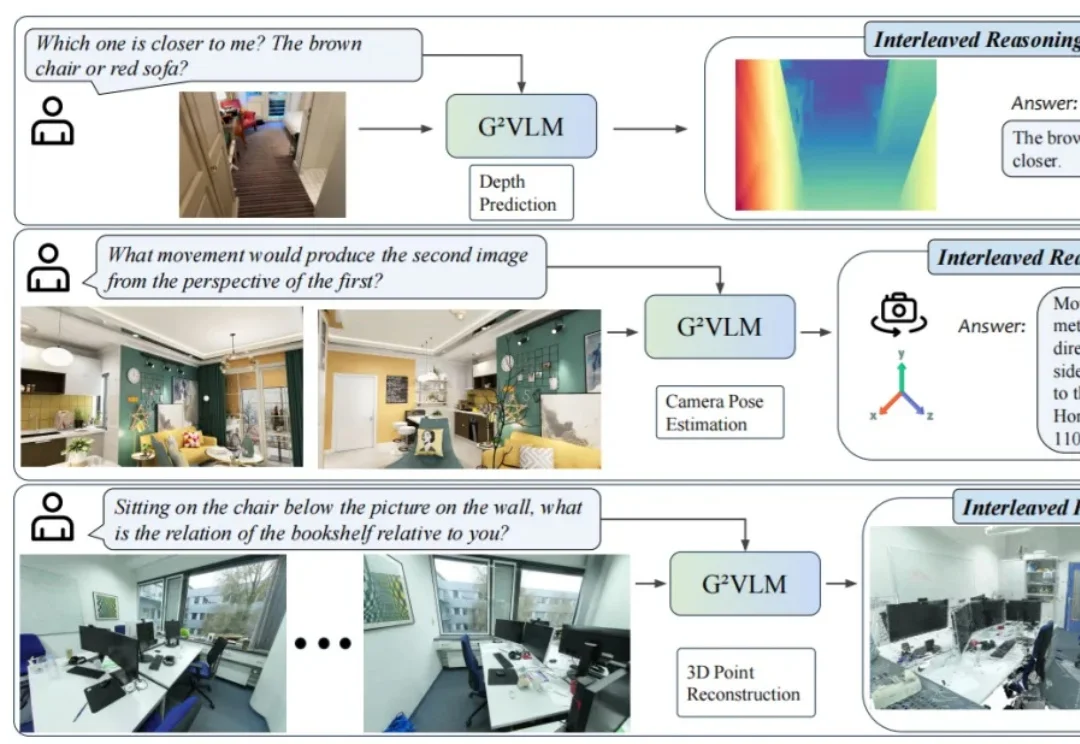
近日,24 岁的 00 后博士生胡文博和所在团队造出一款名为 G²VLM 的超级 AI 模型,它是一位拥有空间超能力的视觉语言小能手,不仅能从普通的平面图片中精准地重建出三维世界,还能像人类一样进行复杂的空间思考和空间推理。

人形机器人与具身智能核心零部件领军企业—— 南京因克斯智能科技有限公司(以下简称 “因克斯”)正式宣布,完成近 2 亿元人民币新一轮融资。由华控基金、深创投集团共同领投,普华资本跟投,绿洲资本、锦秋资

软银、英伟达联手注资机器人独角兽Skild AI。 据报道,软银集团(SoftBank Group)与英伟达(Nvidia)正洽谈联合领投Skild AI一轮超10亿美元的融资。本轮融资后,Skild AI公司估值将达140亿美元。

北航刘偲教授团队提出首个大规模真实星座调度基准AEOS-Bench,更创新性地将Transformer模型的泛化能力与航天工程的专业需求深度融合,训练内嵌时间约束的调度模型AEOS-Former。这一组合为未来的“AI星座规划”奠定了新的技术基准。
崇“洋”媚外这一块,也是轮到美国网友了!最近,一篇“中国机器人在比火场救人,美国机器狗还在给扎克伯格套脸?”的帖子被顶上了Reddit热门。这多多少少让一众美国网友有点破防。

实现通用机器人的类人灵巧操作能力,是机器人学领域长期以来的核心挑战之一。近年来,视觉 - 语言 - 动作 (Vision-Language-Action,VLA) 模型在机器人技能学习方面展现出显著潜力,但其发展受制于一个根本性瓶颈:高质量操作数据的获取。