
原力灵机发布 Ferrata 系统,物理 AI 迎来自己的 Harness
原力灵机发布 Ferrata 系统,物理 AI 迎来自己的 Harness模型还不够完美,但机器人必须开始干活。Ferrata 想解决的,正是 Physical AI 从 Demo 走向真实现场之前,最缺的那层安全绳。
来自主题: AI资讯
8008 点击 2026-06-18 12:01
 搜索
搜索
模型还不够完美,但机器人必须开始干活。Ferrata 想解决的,正是 Physical AI 从 Demo 走向真实现场之前,最缺的那层安全绳。

当具身智能行业还在密集PoC、卷demo、拼概念时,原力灵机先把答案押向了一个具体动作。

原力灵机释放商业化信号。
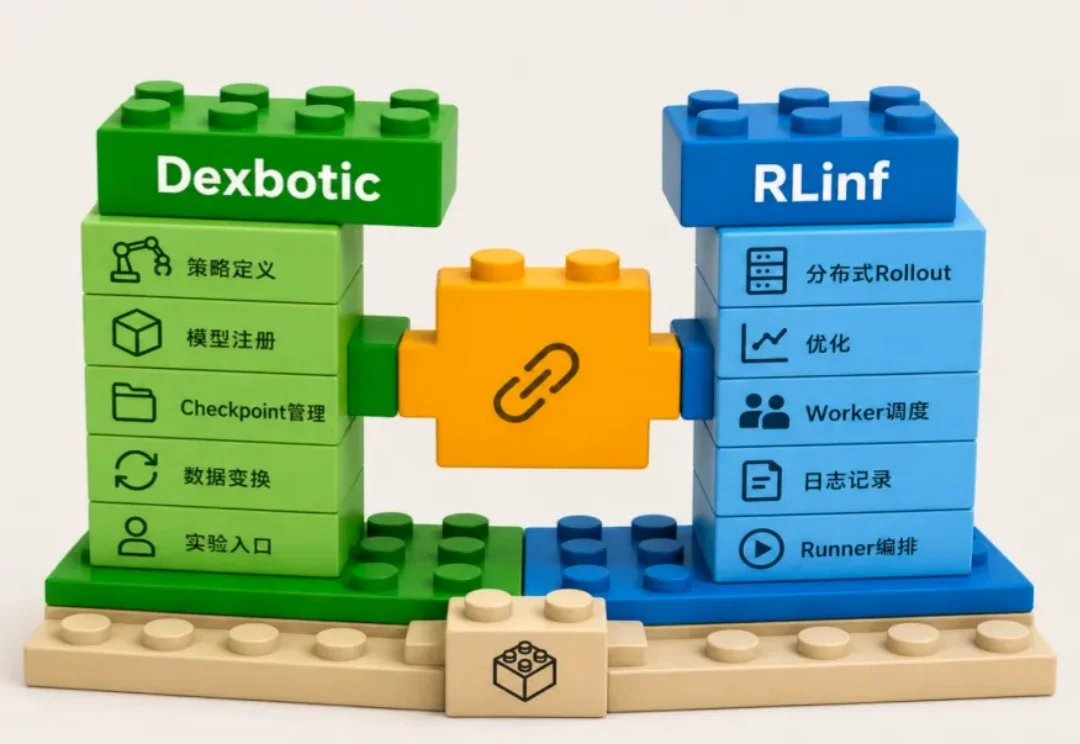
近日,原力灵机开源的具身智能原生框架 Dexbotic 宣布正式支持以 RLinf 作为其分布式强化学习后端。对具身智能开发者而言,这不仅是一次普通的工程适配,更意味着 VLA 模型研发中长期存在的「SFT 与 RL 割裂」问题,正在被真正打通。
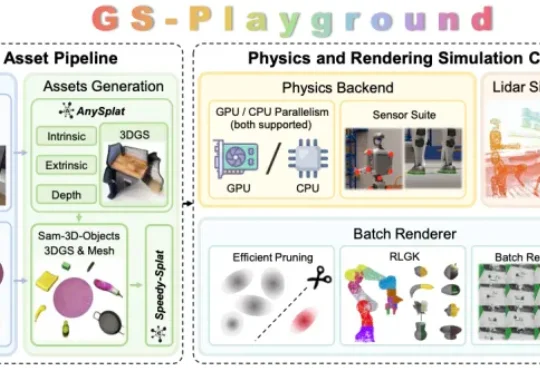
近日,清华大学智能产业研究院(AIR)DISCOVER Lab 联合谋先飞技术、原力灵机、求之科技和地瓜机器人,提出了新一代高通量视觉高保真仿真器 GS-Playground。该成果已被机器人领域国际顶级学术会议 RSS 2026(Robotics: Science and Systems)录用,标志着国内具身智能仿真基础设施在视觉保真度与训练吞吐量两个维度上同时取得了国际领先水平的突破。
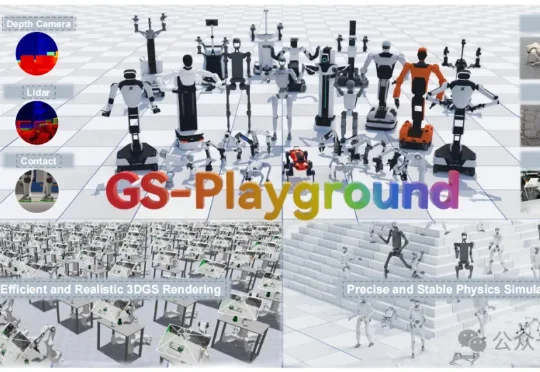
为了攻克这些制约具身智能领域发展的核心难题,清华大学智能产业研究院(AIR)DISCOVER Lab联合谋先飞技术、原力灵机、求之科技和地瓜机器人,提出了GS-Playground通用多模态仿真框架。

Generalist AI的GEN-1热度,仍在发酵。

当前,大语言模型(LLMs)和视觉语言模型(VLMs)在语义领域的成功未能直接迁移至物理机器人,归根结底在于其互联网原生的基因。

昨天上午,有幸受邀参加了一场具身顶流华山论剑活动。

因为成功手搓了一个成本不到5000元的“拼夕夕式”丐版硬件,原旷视6号员工、研究院助理院长范浩强终于下决心,在2025年投身具身智能创业。