
爱诗科技下注的AI视频,正在比它预期的更「快」落地
爱诗科技下注的AI视频,正在比它预期的更「快」落地AI视频用技术的快速迭代压缩时间,用不断涌现的作品和应用加速了「AI视频的商业化元年」的到来。
来自主题: AI资讯
7177 点击 2025-11-21 09:46
 搜索
搜索
AI视频用技术的快速迭代压缩时间,用不断涌现的作品和应用加速了「AI视频的商业化元年」的到来。
AI时代,真是啥都要快。
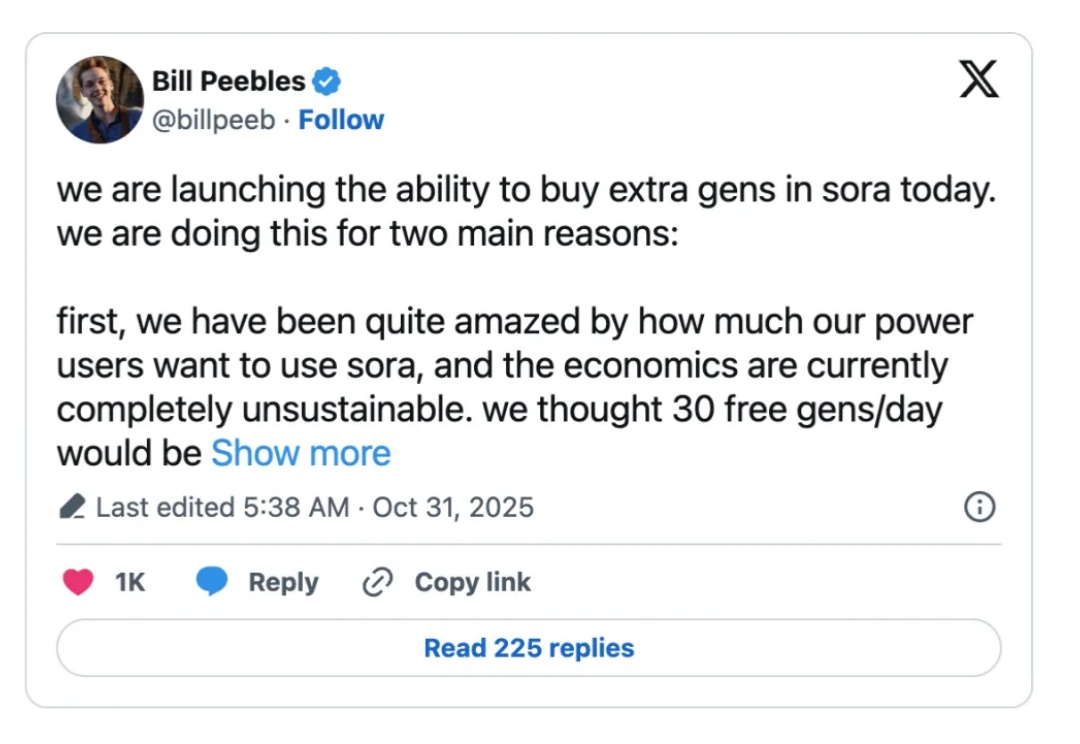
上个月 OpenAI 在发布 Sora 2 的同时将其作为独立应用发布,产品一经上线便登顶苹果应用商店榜首的现象级产品。本篇内容是对 Sora 2 的三位核心负责人的访谈:研发负责人 Bill Peebles、产品负责人 Rohan Sahai 以及工程与产品负责人 Thomas Dimson,Dimson 还参与过 Instagram 产品的搭建。
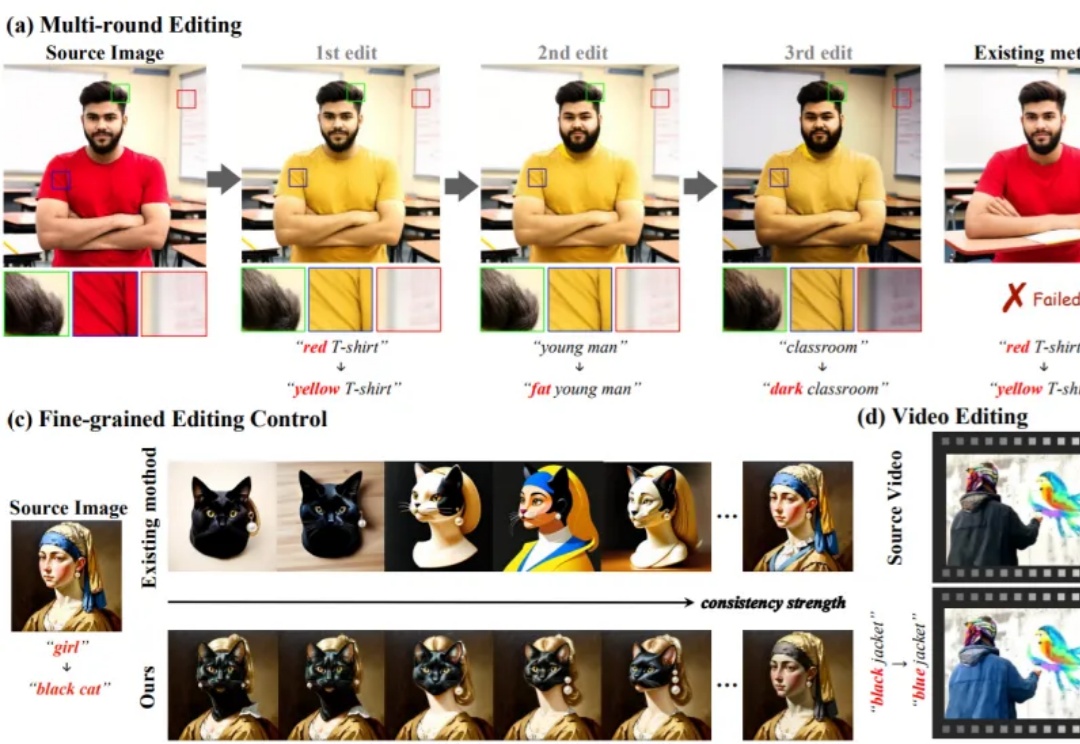
无需额外训练即可适配预训练生成模型的编辑方法,凭借灵活、高效的特性,已成为视觉生成领域的研究热点。这类方法通过操控 Attention 机制(如 Prompt-to-Prompt、MasaCtrl)实现文本引导编辑,但当前技术存在两大核心痛点,严重限制其在复杂场景的应用
今天的朋友圈,被一款叫「灵光」的APP刷屏了。了解了一下,这是一款来自蚂蚁集团的AI 应用,定位是面向普通人的零门槛全模态 AI 助手,还可以自然语言30秒生成可互动的小应用。这让我想到了还在预热,这周即将发布的Gemini3.0,一句话生成操作系统,这都给了我们一个无限想象力的画面。未来,AI生成的边界是什么?
做过独立开发的朋友都清楚,虽然现在 AI 已经能写出相当不错的前端,后端也有成熟的 BaaS 服务,但应用开发并不仅仅只是写份代码。

千问 APP 上线还是超乎意料。毕竟在 2025 年底,可能也只有阿里有底气尝试,重推一款 AI 应用类产品。界面简洁、克制的不像阿里出品。刚好这两天,我做了件有意思的事:泡在小红书,专门看普通用户在用 AI 做些什么,却发现不少人把 AI 用在各种“不正经”上:

昨天,阿里的千问APP,在应用商店里。终于悄悄上线了。从之前的通义APP的双色渐变,变成了现在的属于千问的单色。功能增加了很多,模型也支持了Qwen全系列最新模型。

在刚刚结束的百度世界大会上,百度索性给搜索系统来了次“换头”升级——推出了一个能听、能想、能干活、能创作的AI超级大脑:百度猎户座。百度百看、文心助手这些AI应用都在它底下跑,背后连着百度二十多年的搜索底子、各行业的专业能力,还有全网丰富的MCP服务生态。
是否有哪个AI产品,让你觉得——它已经深入我们某个核心生活或工作场景,并让我们完全离不开?