
DeepSeek网页版大升级!随后宕机11小时崩上热搜,新模型真的来了
DeepSeek网页版大升级!随后宕机11小时崩上热搜,新模型真的来了DeepSeek崩上热搜!宕机持续超过8小时,写论文的、角色扮演的和心情不好找AI吐槽的人也都崩溃了。But!这不是一次普通的服务中断,反而被解读为模型升级的前兆。
来自主题: AI资讯
8303 点击 2026-03-30 10:58
 搜索
搜索
DeepSeek崩上热搜!宕机持续超过8小时,写论文的、角色扮演的和心情不好找AI吐槽的人也都崩溃了。But!这不是一次普通的服务中断,反而被解读为模型升级的前兆。

2亿美元A轮融资,估值110亿,成立仅一年就成为独角兽。更震撼的是创始人——25岁的广州00后洪乐潼,父母是从未上过大学的普通务工者。她用数学解决AI最大的痛点:让模型推理步步可验证,彻底杜绝幻觉。为了加入她,弗吉尼亚大学终身教授直接辞职。

Karpathy给一支平均年龄25岁的「叛军」站台,红杉和GV连眼都不眨就拍出1.8亿美金。这群人放话:要么把效率干得比人脑高10倍,要么看着AI把地球烧干!
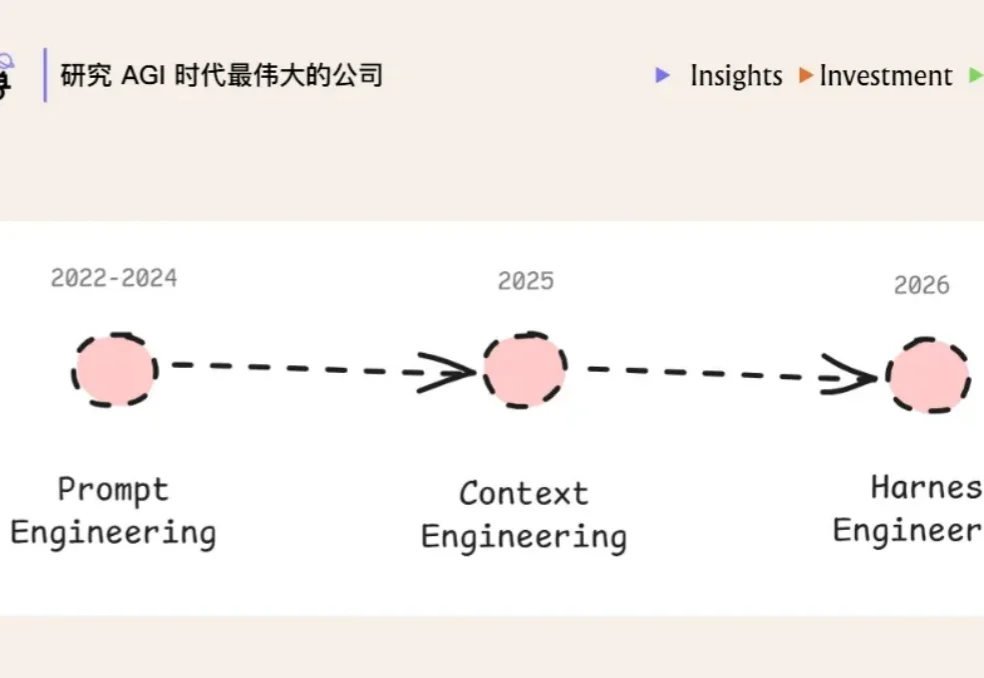
最近,harness engineering 又成了继 prompt engineering、context engineering 之后新一代的 buzzword。
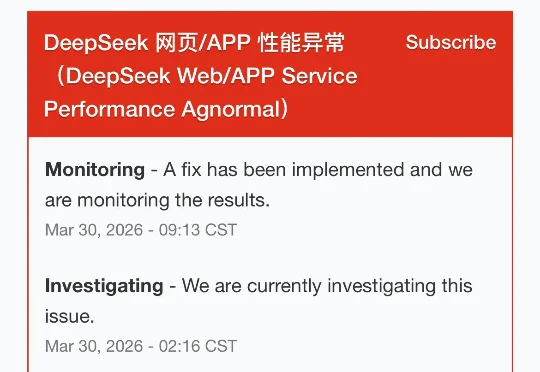
从3月29日晚21时左右起,国内大模型产品DeepSeek的网页端与APP端服务器持续处于崩溃状态,大量用户反馈无法正常访问对话服务。
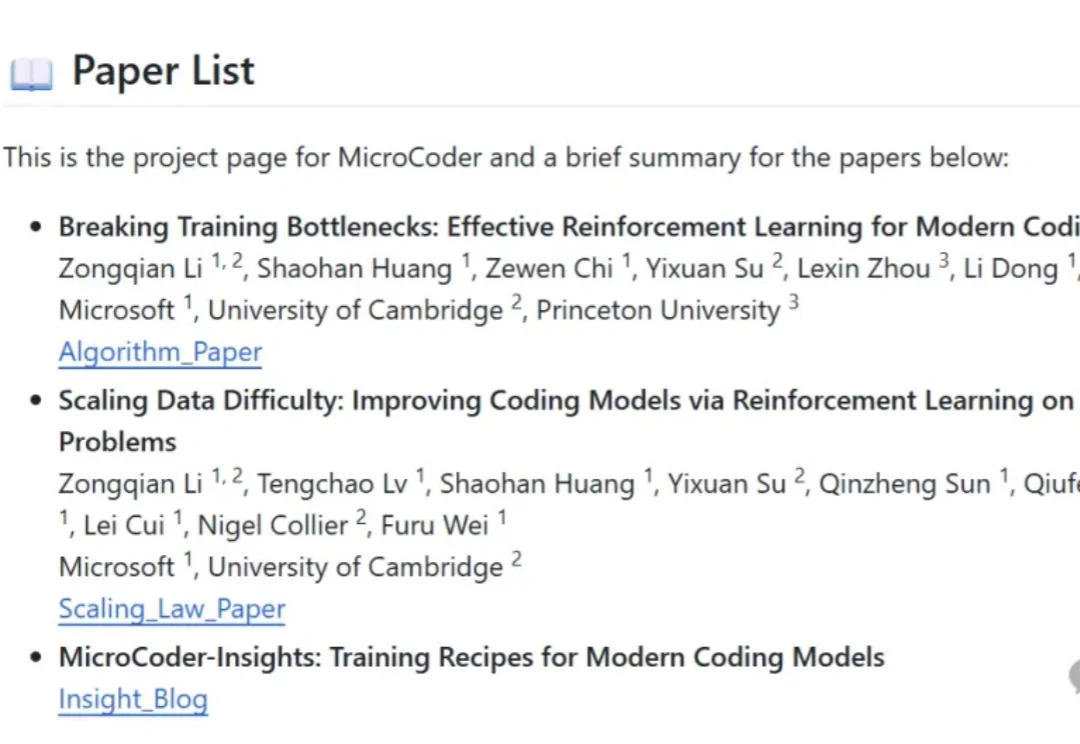
新一代代码模型的训练动态已与旧模型截然不同,主流强化学习方法和数据集在其上几乎“失效”。
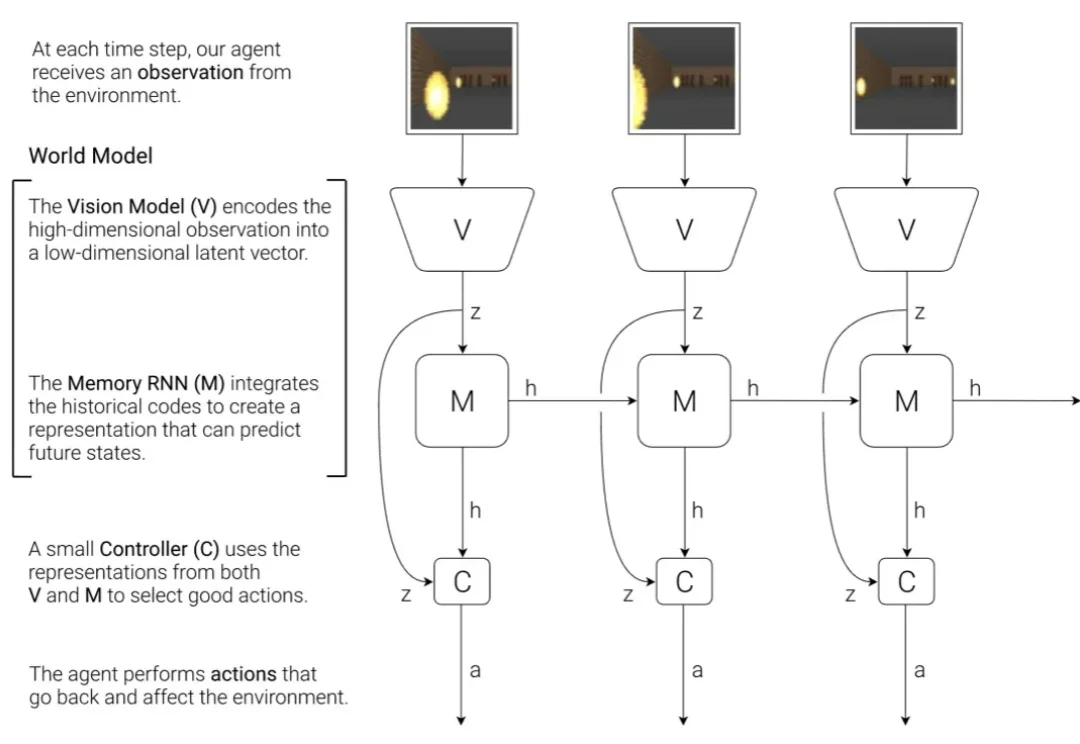
当世界模型越来越大,真正制约它走向「内部模拟器」的,未必是表征能力,而可能是动力学建模。
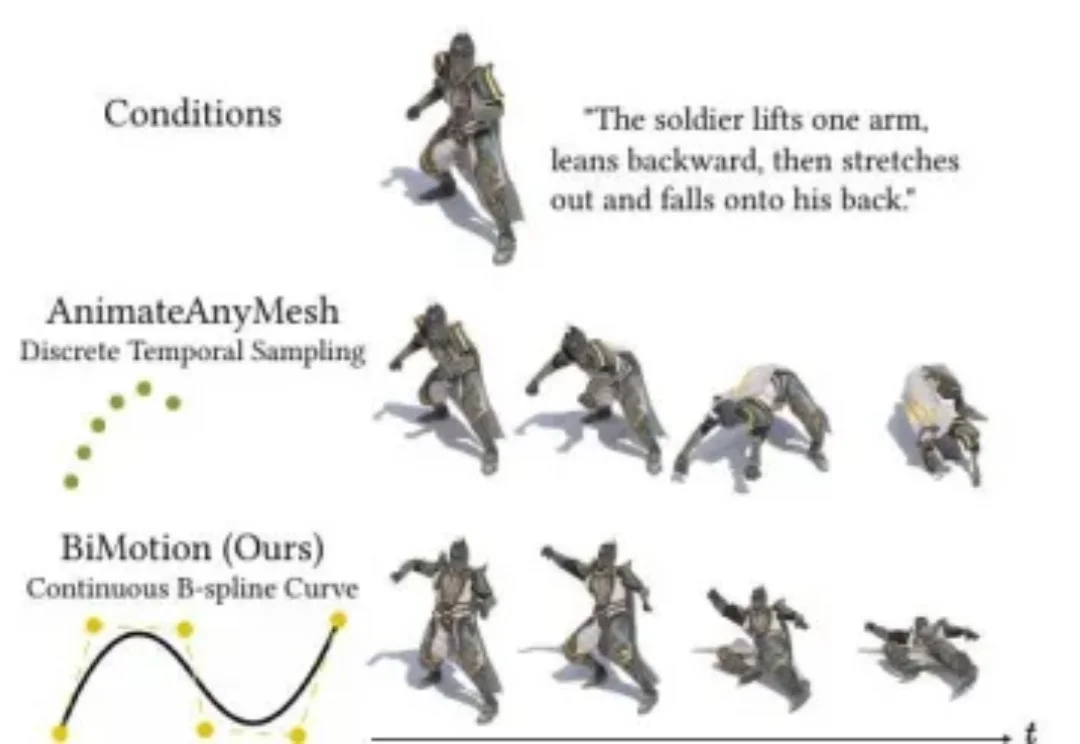
当你希望 AI 将 "士兵举起手臂,向后倾身,然后身体向前扑倒" 这段文字转化为一段 3D 角色动画,现有大多数方法给出的答案是:一段摇摇晃晃、语义残缺的短片段。这并非模型能力不足,问题的根源在于将运动表达为逐帧离散序列这一根本性的设计决策。
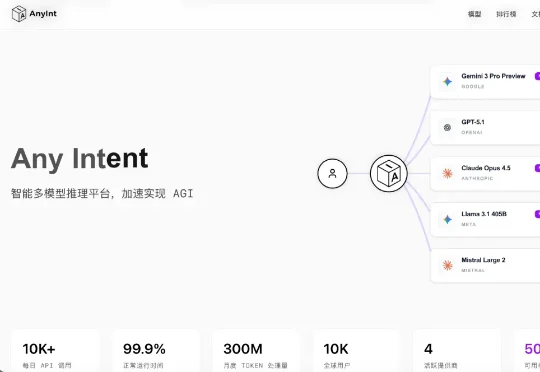
《读佳》获悉,百度投资了一家专门做智能多模型推理的平台“AnyInt”,主体公司为上海宏诺伊曼科技有限公司(下简称“宏诺伊曼科技”),本月,百度关联公司北京百度网讯科技有限公司认缴17.6471万元,
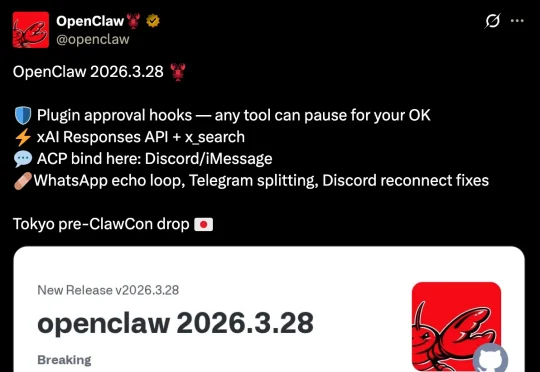
今天,OpenClaw 直接推送了最新的 3.28 版本。这次更新的内容也是格外丰富,简直是底层能力的全面大解放。简单挑几个跟日常体验关系最大的。Qwen 模型正式迁移到了 Model Studio,直接走新的认证选项,干净利落。