LLM-in-Sandbox:给大模型一台电脑,激发通用智能体能力
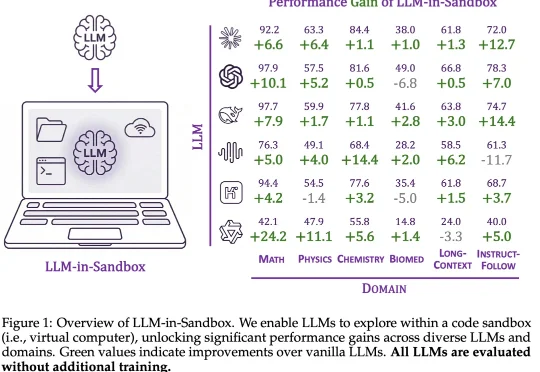
LLM-in-Sandbox:给大模型一台电脑,激发通用智能体能力大模型的能力正在被不同的范式逐步解锁:In-Context Learning 展示了模型无需微调即可泛化到新任务;Chain-of-Thought 通过引导模型分步推理来提升复杂问题的求解能力;近期,智能体框架则赋予模型调用工具、多轮交互的能力。
来自主题: AI技术研报
10658 点击 2026-01-30 16:05
 搜索
搜索
大模型的能力正在被不同的范式逐步解锁:In-Context Learning 展示了模型无需微调即可泛化到新任务;Chain-of-Thought 通过引导模型分步推理来提升复杂问题的求解能力;近期,智能体框架则赋予模型调用工具、多轮交互的能力。
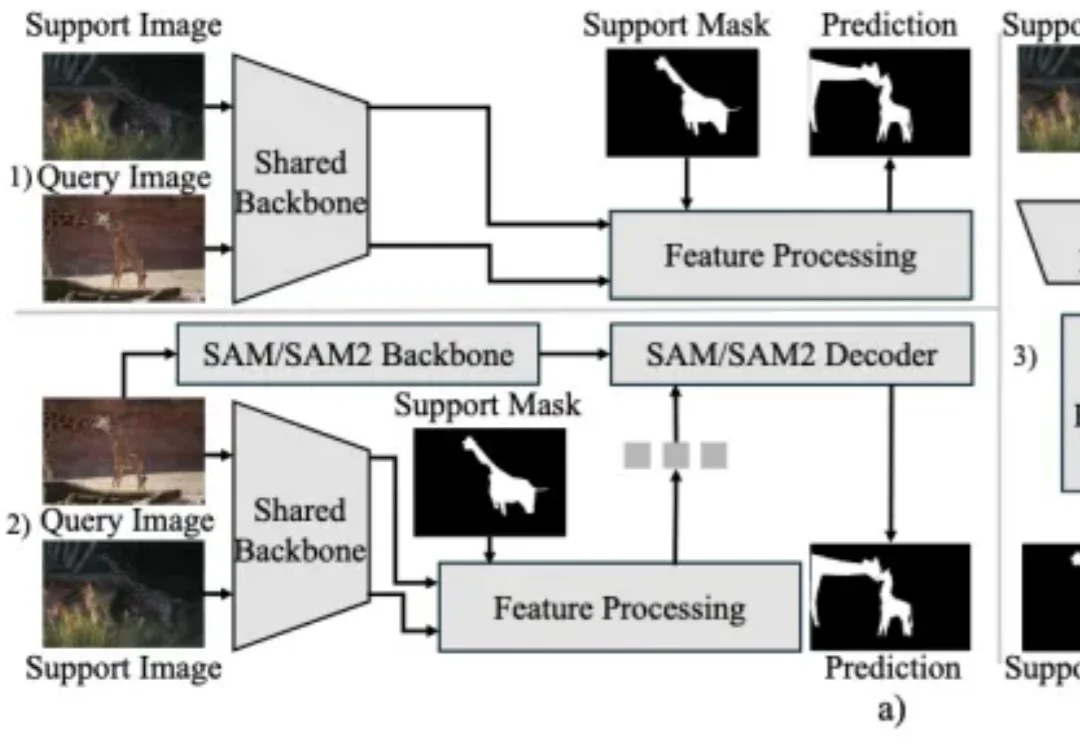
上下文分割(In-Context Segmentation)旨在通过参考示例指导模型实现对特定目标的自动化分割。尽管 SAM 凭借卓越的零样本泛化能力为此提供了强大的基础,但将其应用于此仍受限于提示(如点或框)构建,这样的需求不仅制约了批量推理的自动化效率,更使得模型在处理复杂的连续视频时,难以维持时空一致性。
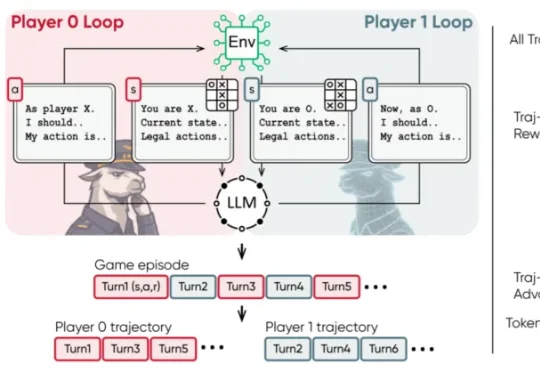
近日,清华大学等机构的研究团队提出了 MARSHAL 框架。该框架利用强化学习,让大模型在策略游戏中进行自博弈(Self-Play)。实验表明,这种多轮、多智能体训练不仅提升了模型在游戏中的博弈决策水
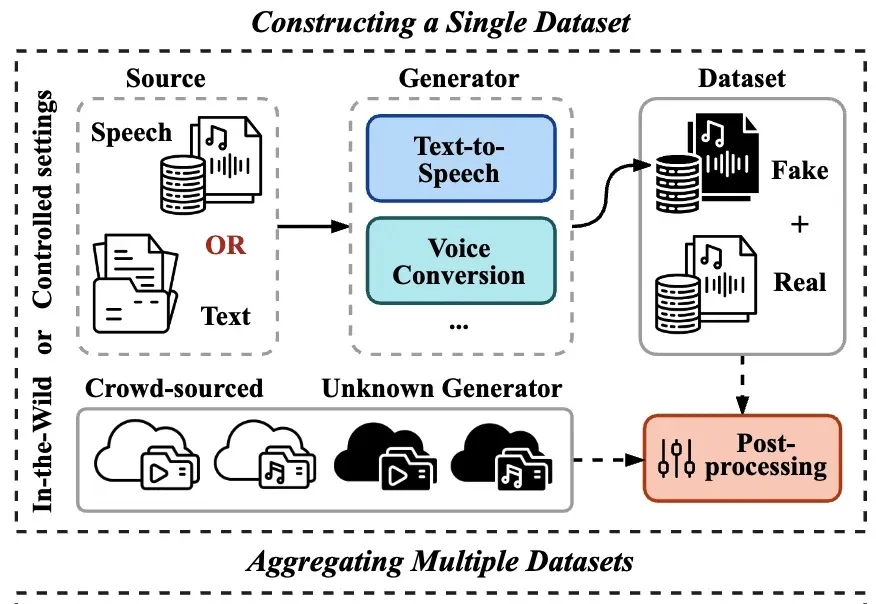
在生成式 AI 技术日新月异的背景下,合成语音的逼真度已达到真假难辨的水平,随之而来的语音欺诈与信息伪造风险也愈演愈烈。作为应对手段,语音鉴伪技术已成为信息安全领域的研究重心。
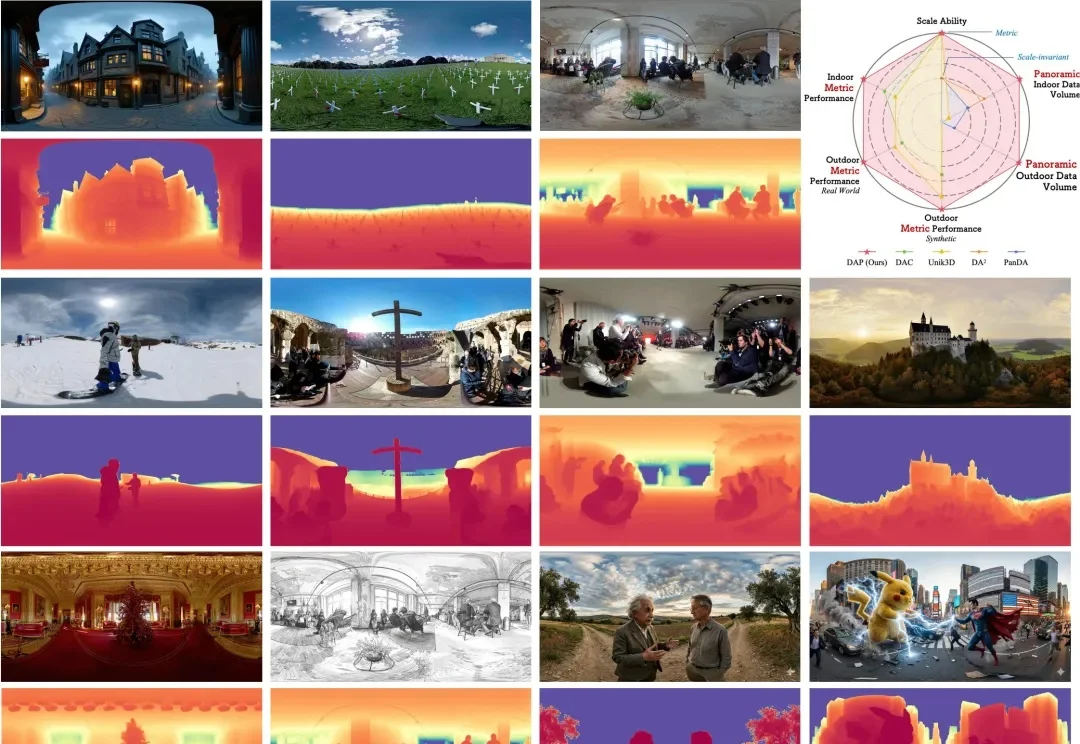
在空间智能(Spatial Intelligence)飞速发展的今天,全景视角因其 360° 的环绕覆盖能力,成为了机器人导航、自动驾驶及虚拟现实的核心基石。然而,全景深度估计长期面临 “数据荒” 与 “模型泛化差” 的瓶颈。
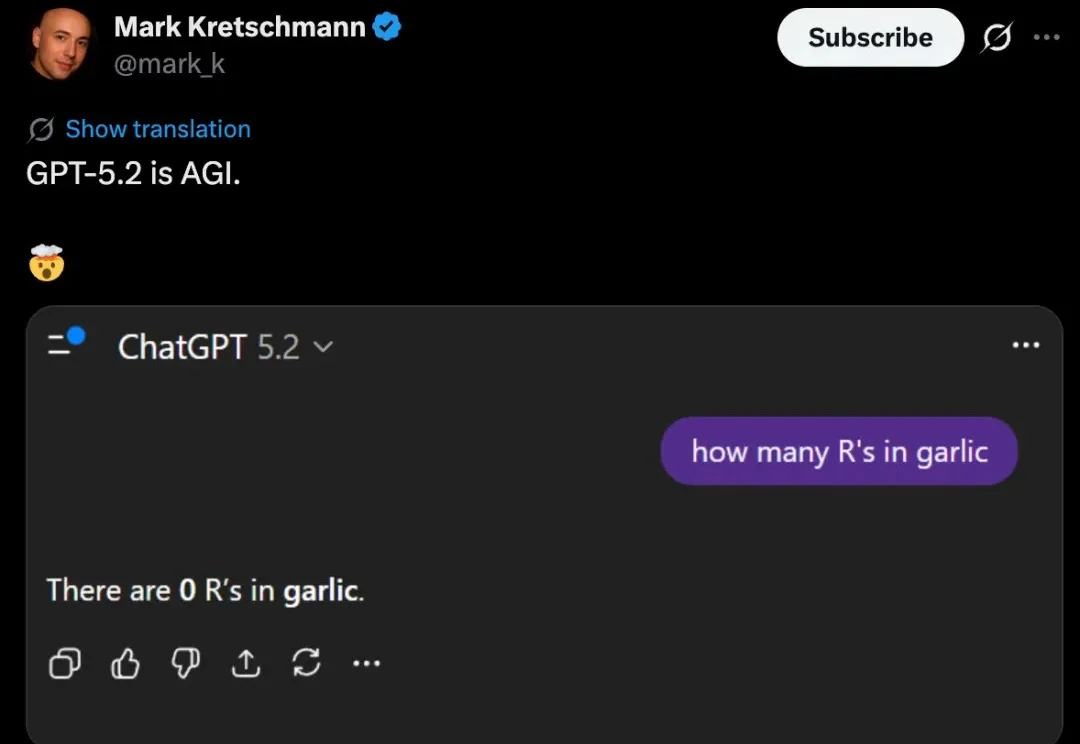
大模型的通用性和泛化性越来越强大了。

北航刘偲教授团队提出首个大规模真实星座调度基准AEOS-Bench,更创新性地将Transformer模型的泛化能力与航天工程的专业需求深度融合,训练内嵌时间约束的调度模型AEOS-Former。这一组合为未来的“AI星座规划”奠定了新的技术基准。
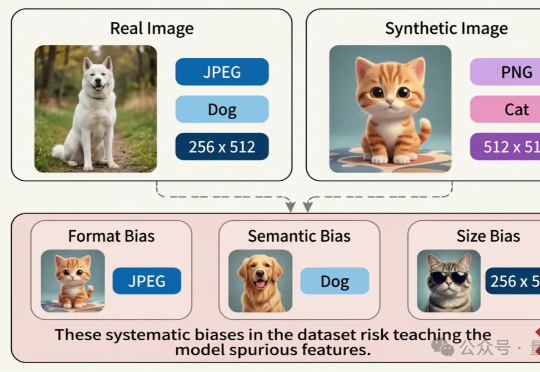
近日,腾讯优图实验室联合华东理工大学、北京大学等研究团队在A生成图像检测(AI-Generated Image Detection)泛化问题上展开研究,提出Dual Data Alignment(双重数据对齐,DDA)方法,从数据层面系统性抑制“偏差特征”,显著提升检测器在跨模型、跨数据域场景下的泛化能力。
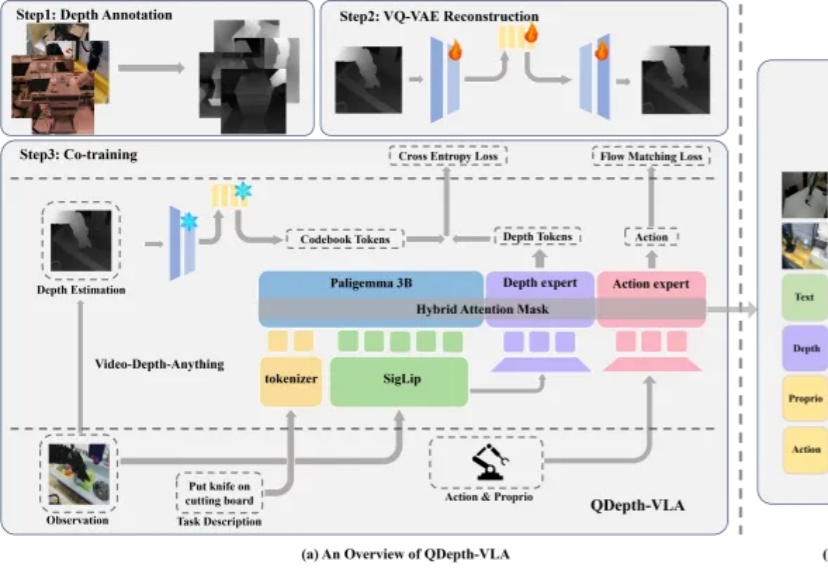
视觉-语言-动作模型(VLA)在机器人操控领域展现出巨大潜力。通过赋予预训练视觉-语言模型(VLM)动作生成能力,机器人能够理解自然语言指令并在多样化场景中展现出强大的泛化能力。然而,这类模型在应对长时序或精细操作任务时,仍然存在性能下降的现象。
长期以来,多模态代码生成(Multimodal Code Generation)的训练严重依赖于特定任务的监督微调(SFT)。尽管这种范式在 Chart-to-code 等单一任务上取得了显著成功 ,但其 “狭隘的训练范围” 从根本上限制了模型的泛化能力,阻碍了通用视觉代码智能(Generalized VIsioN Code Intelligence)的发展 。