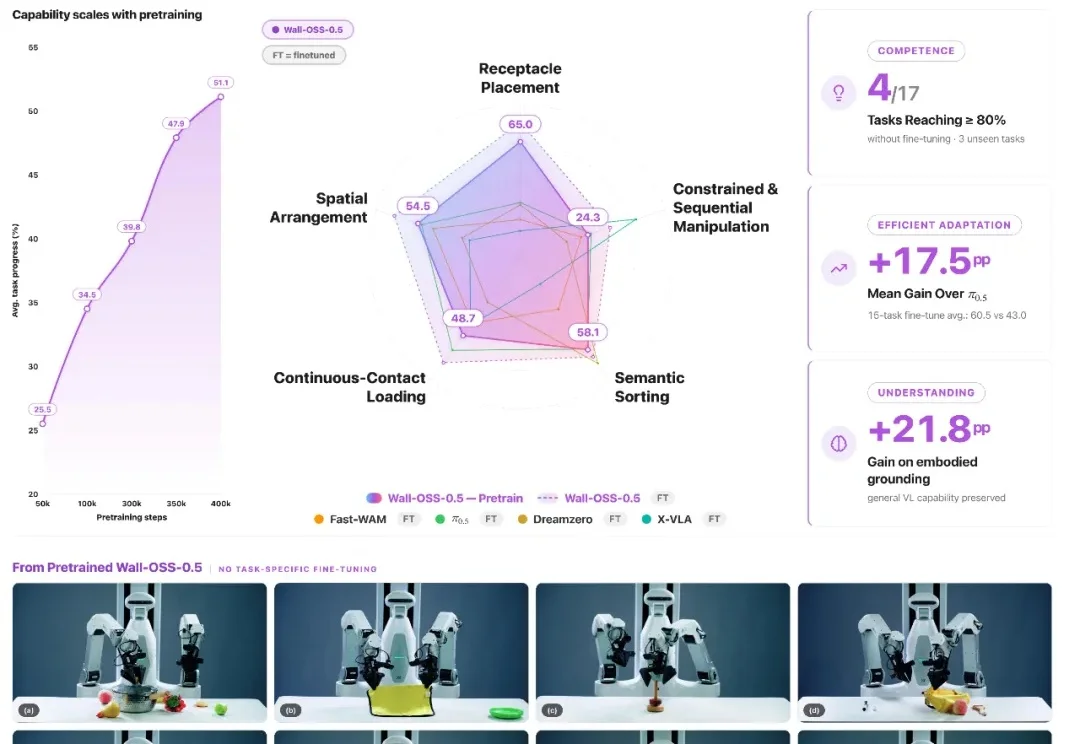
刚刚,国产预训练具身大模型开源了,让后训练不再是必选项!
刚刚,国产预训练具身大模型开源了,让后训练不再是必选项!2026 年初,国内具身智能赛道掀起了一波开源潮,越来越多团队开始公开自己的视觉-语言-动作(VLA)模型、数据集与训练框架。与此同时,行业竞争也逐渐集中到 benchmark 成绩、任务成功率以及跨任务泛化能力上,尤其是在标准化或已训练任务中的表现。
来自主题: AI技术研报
8289 点击 2026-05-29 09:19
 搜索
搜索
2026 年初,国内具身智能赛道掀起了一波开源潮,越来越多团队开始公开自己的视觉-语言-动作(VLA)模型、数据集与训练框架。与此同时,行业竞争也逐渐集中到 benchmark 成绩、任务成功率以及跨任务泛化能力上,尤其是在标准化或已训练任务中的表现。
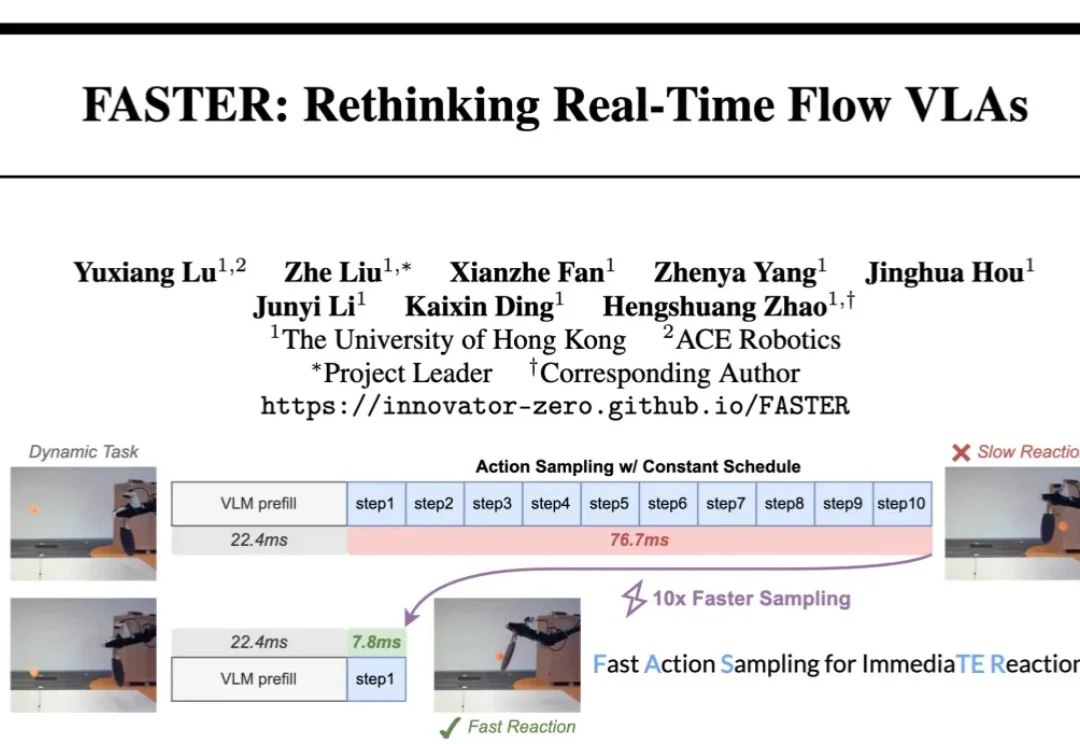
具身智能正以前所未有的速度发展,VLA 模型展现出越来越强的动作和泛化能力。然而,当我们真正把 VLA 模型部署到物理世界时,一个核心挑战浮出水面:实时性。
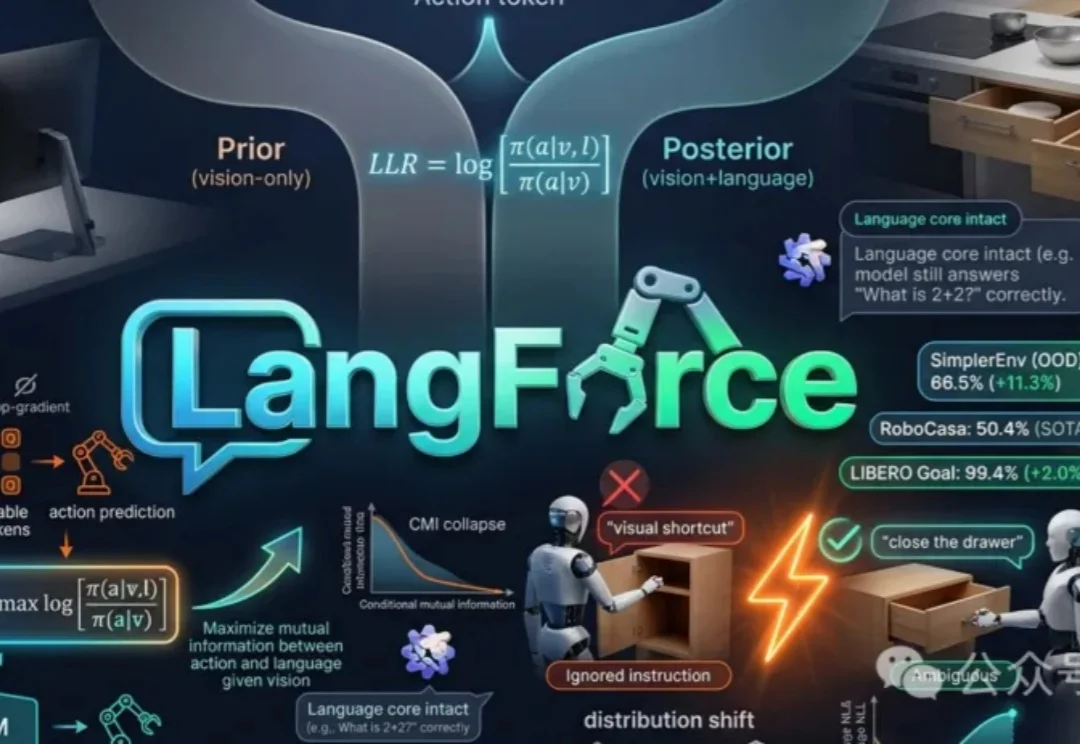
当前VLA模型常依赖视觉线索而非语言指令,导致在新场景下表现不佳。论文提出LangForce方法,通过引入对数似然比损失,强化模型对语言的依赖,提升其在分布外环境中的泛化能力,并保留语言核心功能。

研究者用特制雨伞干扰无人机视觉系统,让其误判目标在远去,从而失控俯冲。FlyTrap攻击无需信号干扰,仅靠物理图案就能欺骗多款商用无人机,实现静默捕获或击毁。实验显示,物理闭环攻击成功率超60%,且对新人物、新场景均有强泛化能力。这项研究揭示了AI感知系统的重大安全隐患,警示我们:视觉安全正成为智能设备的阿喀琉斯之踵。
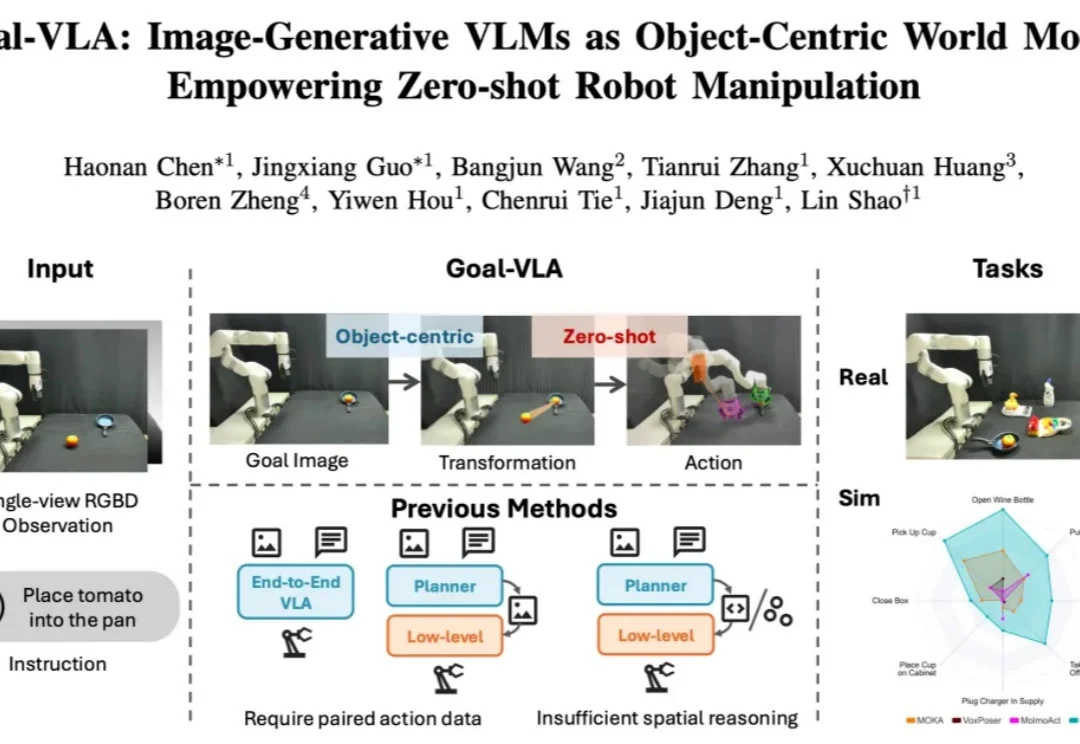
在具身智能领域,机器人操作的泛化能力一直是一个核心挑战。当前,视觉 - 语言 - 动作(VLA)模型主要分为两大范式:端到端模型与分层模型。端到端 VLA 模型(如 RT-2 [1], OpenVLA [2])严重依赖海量的 “指令 - 视觉 - 动作” 成对数据,获取成本极高,导致其在面对新任务或新场景时零样本泛化能力受限。
在大模型后训练阶段,监督微调(SFT)和强化学习(RL)是两根不可或缺的支柱。SFT 利用高质量的离线(Off-policy)数据快速注入知识,但受限于静态数据分布,泛化能力往往容易触及天花板并带来灾难性遗忘;RL 则允许模型在探索中不断自我迭代,产生与当前策略同分布(On-policy)的数据,上限极高,但往往伴随着训练极度不稳定、计算资源消耗巨大的痛点。
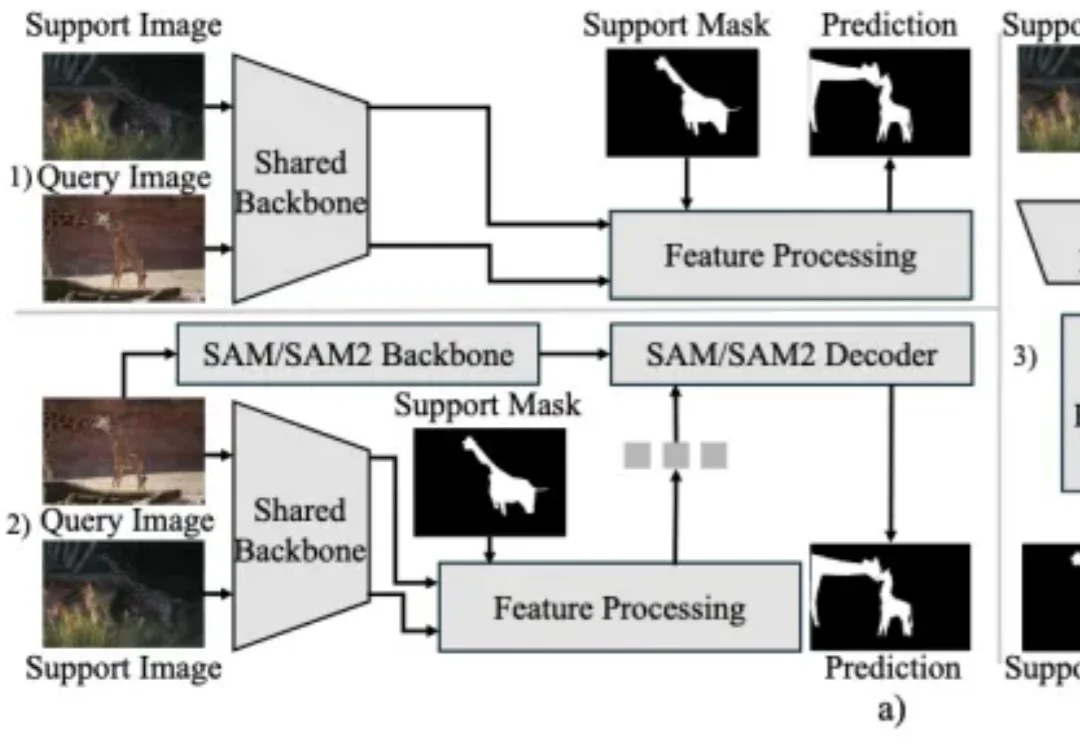
上下文分割(In-Context Segmentation)旨在通过参考示例指导模型实现对特定目标的自动化分割。尽管 SAM 凭借卓越的零样本泛化能力为此提供了强大的基础,但将其应用于此仍受限于提示(如点或框)构建,这样的需求不仅制约了批量推理的自动化效率,更使得模型在处理复杂的连续视频时,难以维持时空一致性。

北航刘偲教授团队提出首个大规模真实星座调度基准AEOS-Bench,更创新性地将Transformer模型的泛化能力与航天工程的专业需求深度融合,训练内嵌时间约束的调度模型AEOS-Former。这一组合为未来的“AI星座规划”奠定了新的技术基准。
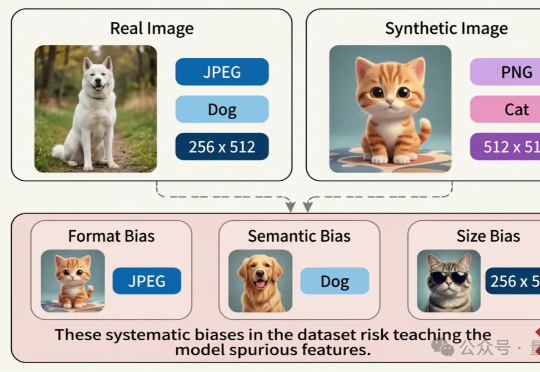
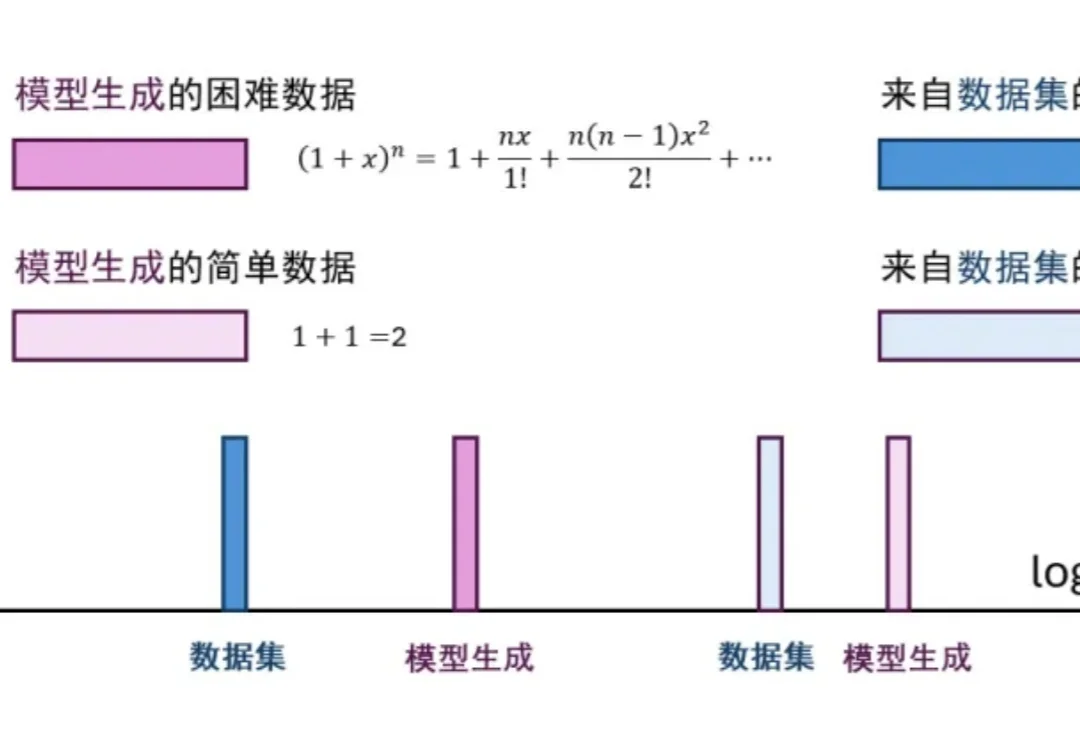
近日,腾讯优图实验室联合华东理工大学、北京大学等研究团队在A生成图像检测(AI-Generated Image Detection)泛化问题上展开研究,提出Dual Data Alignment(双重数据对齐,DDA)方法,从数据层面系统性抑制“偏差特征”,显著提升检测器在跨模型、跨数据域场景下的泛化能力。
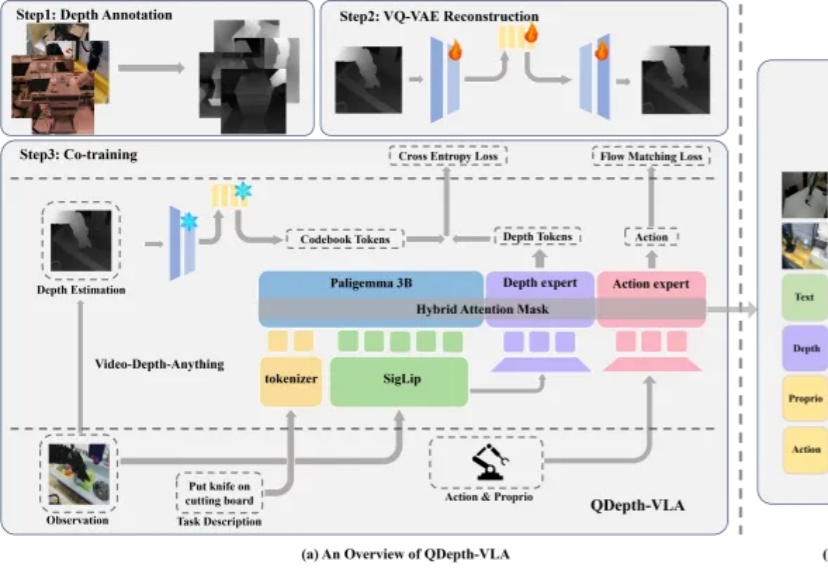
视觉-语言-动作模型(VLA)在机器人操控领域展现出巨大潜力。通过赋予预训练视觉-语言模型(VLM)动作生成能力,机器人能够理解自然语言指令并在多样化场景中展现出强大的泛化能力。然而,这类模型在应对长时序或精细操作任务时,仍然存在性能下降的现象。