# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
「仿生人会梦见电子羊吗?」这是科幻界一个闻名遐迩的问题。
现在英伟达给出答案:Yes!而且还可以从中学习新技能。
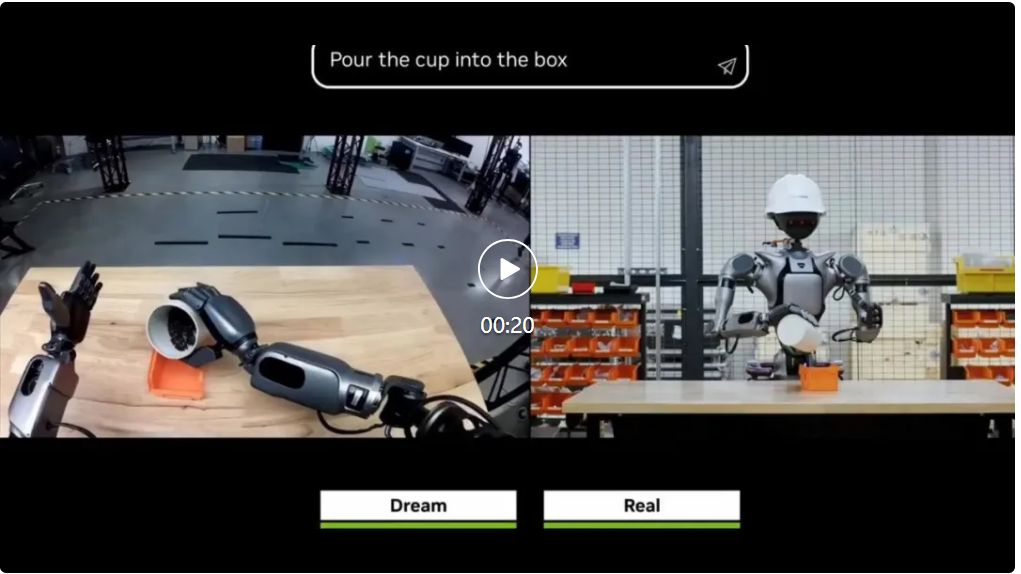
如下面各种丝滑操作,都没有真实世界数据作为训练支撑。
仅凭文本指令,机器人就完成相应任务。
这是NVIDIA GEAR Lab最新推出的DreamGen项目。
它所说的“梦境中学习”,是巧妙利用AI视频世界模型生成神经轨迹,仅需少量现实视频,就能让机器人学会执行22种新任务。
在真实机器人测试上,复杂任务的成功率更是从21%显著提升至45.5%,并首次实现真正意义上的从0开始的泛化。
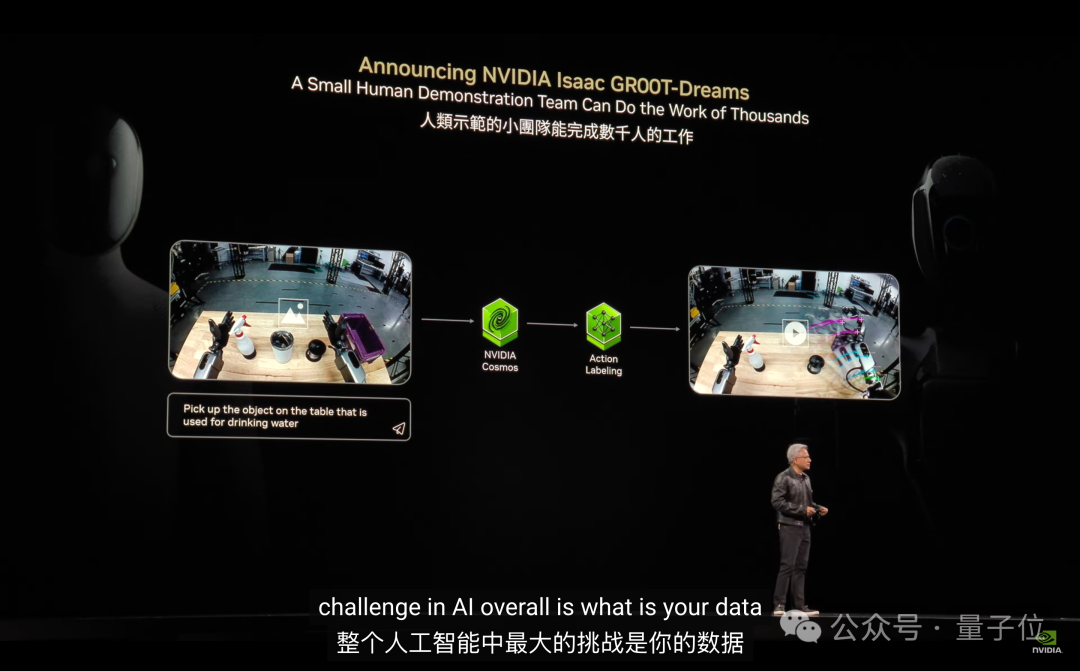
英伟达掌门人老黄最近也在Computex 2025演讲上将其作为GR00T-Dreams的一部分对外正式进行宣布。
接下来就DreamGen构造我们一一拆解。
传统机器人虽已展现出执行复杂现实任务的巨大潜力,但严重依赖人工收集的大规模遥操作数据,成本高且耗时长。
纯粹的计算机仿真合成数据,也由于模拟环境与真实物理世界差距大,机器人所学会的技能难以直接应用到现实。

于是研究团队提出要不试试让机器人在梦境中学习?
这个想法也并非空穴来风,早在2016年MIT的一项研究就证实,婴儿大脑会通过睡眠期间的神经活动进行自发学习。
由此诞生的DreamGen,核心思想就是利用成熟的视频世界模型 (如Sora、Veo),对现实视频进行虚拟合成,创建大规模逼真训练数据。
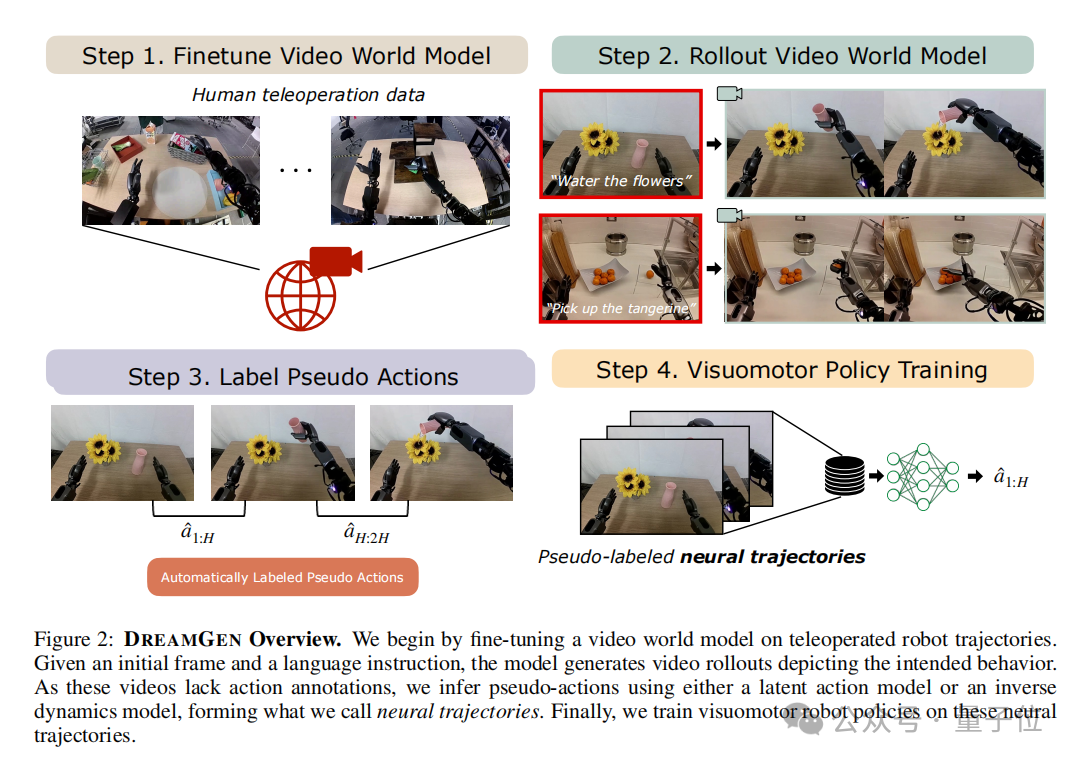
新范式主要遵循四步走流程:
通过目标机器人的远程操作轨迹,捕捉其运动学与动力学特征,微调视频世界模型。
给定初始帧与语言指令后,生成描述预期行为的海量机器人视频序列,既包含微调后的已知行为,也包括未知场景中的新行为。
当然在这一步也要过滤掉那些不听从指令的噩梦。
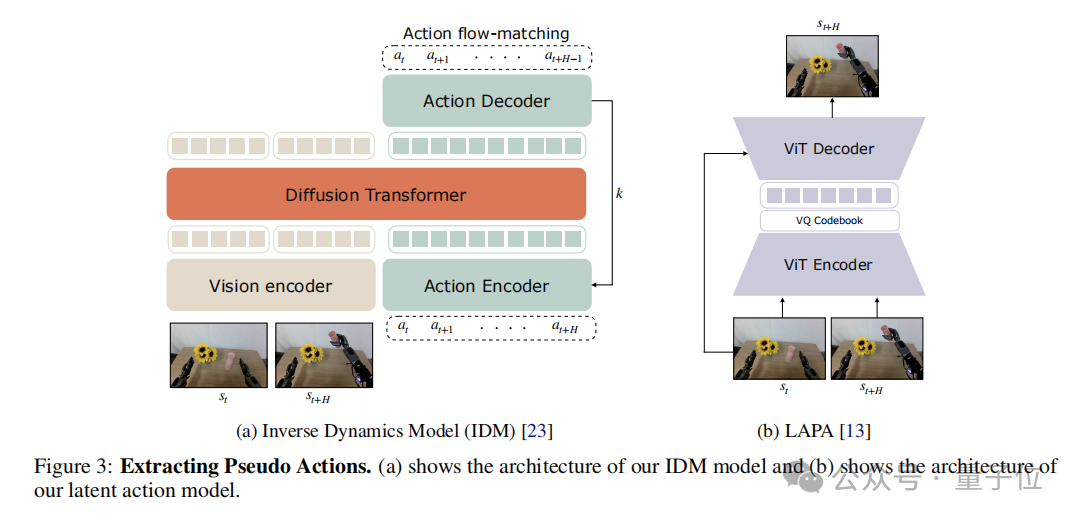
利用潜在动作模型或逆动力学模型 (IDM)解析伪动作序列,形成神经轨迹。
使用生成的视频-动作序列对(即神经轨迹)训练下游视觉运动策略。
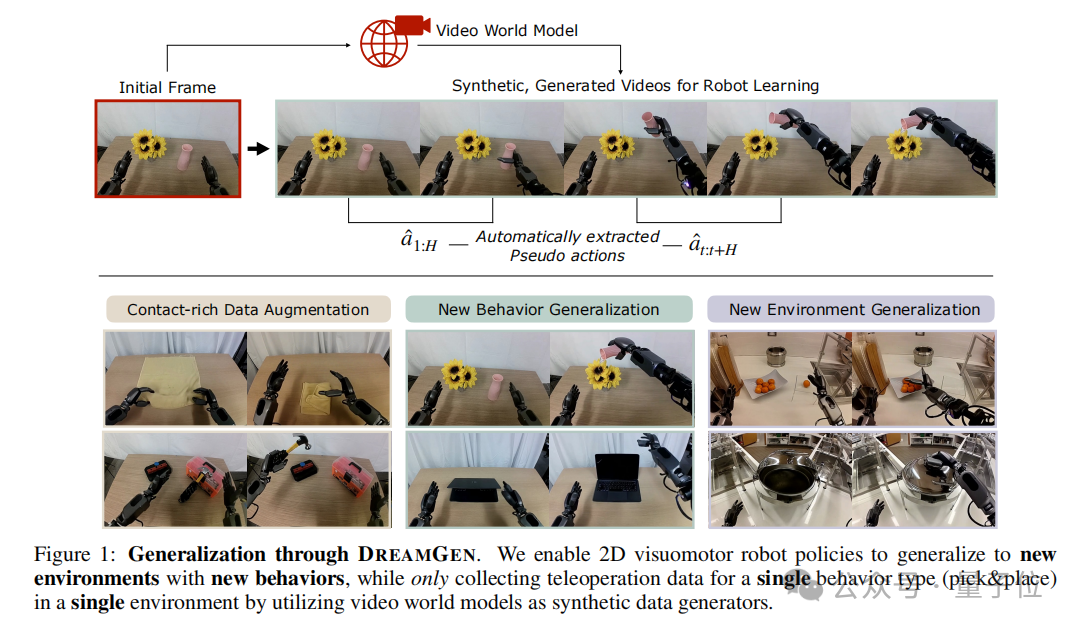
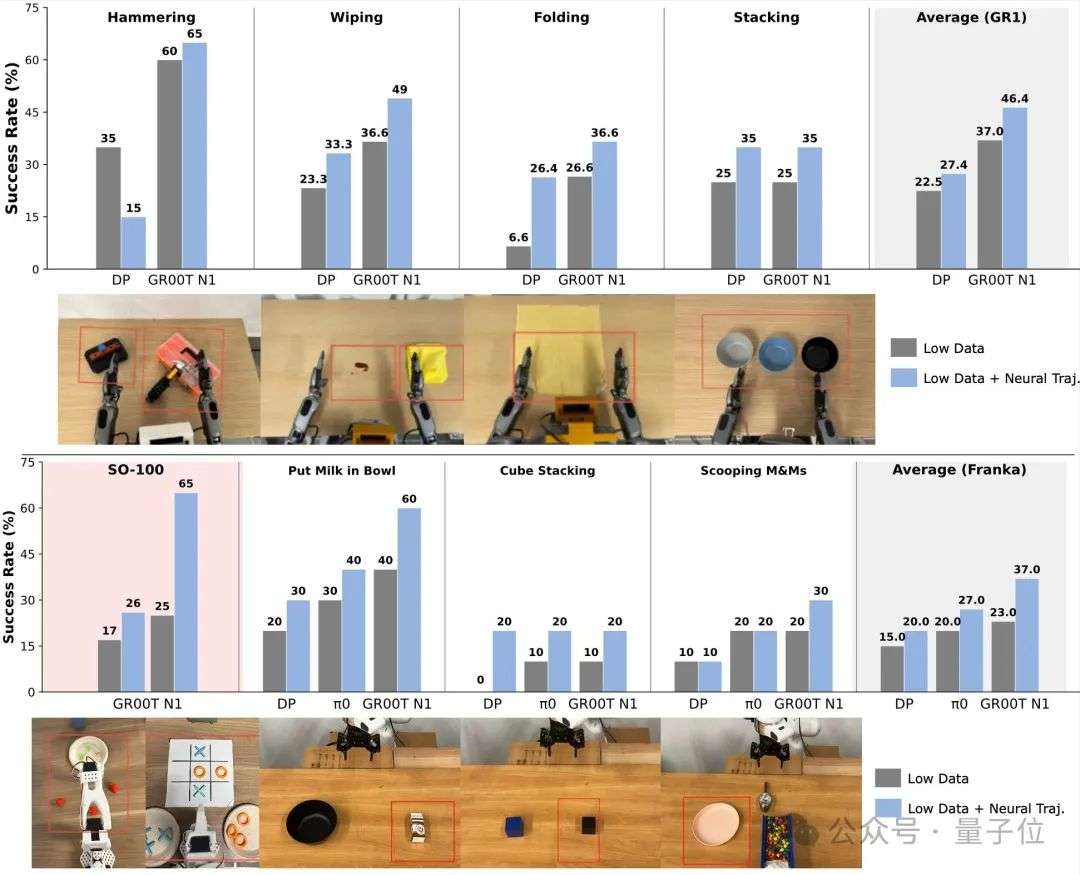
通过DreamGen,团队实现仅凭单个环境中的单一拾取任务的遥操作数据,就能在10个新环境中生成22个新动作的“梦境”或神经轨迹,例如倾倒、锤击、折叠、熨烫衣物、舀取M&M‘s豆等,并训练机器人“零镜头”下执行这些任务。
此外它还可以增强不同机器人系统(如Franka与SO-100)以及不同策略架构(如Diffusion Policy、GR00T N1)在接触密集型任务中的表现,真正实现了从0到1的零样本行为泛化和零样本环境泛化。
实验结果表明,利用单一动作数据学习新动作的成功率从11.2%升至43.2%,在单环境训练下,全新环境中的成功率也从0%达到了28.5% (传统方法几乎无法完成)。
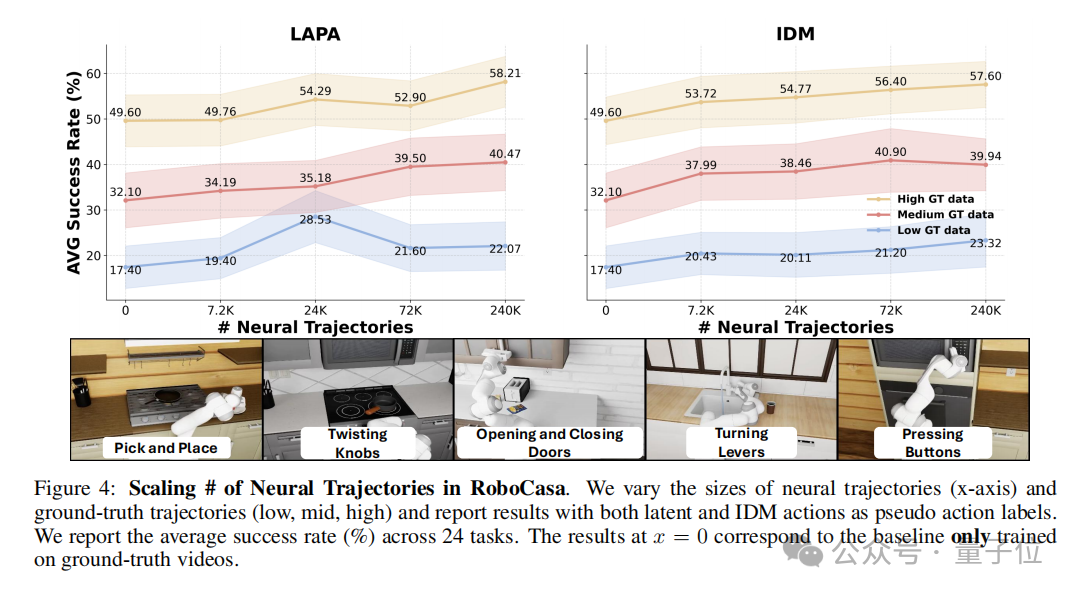
以RoboCasa为基准的仿真验证中,神经轨迹规模达到人类演示数据的333倍,策略性能随轨迹数量呈对数线性提升。
在Fourier GR1、Franka Emika和SO-100机器人等真实平台上复杂任务的成功率也提升显著,均证实了DreamGen的有效性。
另外团队还开发了首个机器人视频生成评估基准DreamGen Bench,通过指令遵循度(IF)和物理合理性(PA)两项指标,评估模型生成数据的质量。
英伟达的野心还远不止于此,DreamGen作为英伟达进军物理AI的宏伟蓝图的一部分,将协助新工具GR00T-Dreams从单个图像中生成大量合成运动数据,并通过压缩动作令牌加速机器人行为学习。
这意味着GR00T-Dreams将会让GR00T N1.5开发从3个月锐减至36小时,作为英伟达开放、通用、完全可定制的类人推理和技能基础模型的首次更新,GR00T N1.5将部署在Jetson Thor上,预计于今年底推出。
老黄谈到这一发展时表示:
从机器人的人工智能大脑,到用于实践的模拟世界,再到用于训练基础模型的人工智能超级计算机,NVIDIA为机器人技术发展的每个阶段提供了基础模块。
也许正如网友所说,英伟达一直走在造梦的路上:
论文链接:https://arxiv.org/abs/2505.12705
项目链接:https://research.nvidia.com/labs/gear/dreamgen/
参考链接:
[1]https://x.com/DrJimFan/status/1924819887139987855
[2]https://x.com/jang_yoel/status/1924805253993488595
[3]https://www.youtube.com/watch?v=TLzna9__DnI&t=5059s
文章来自于“量子位”,作者“鹭羽”



【开源免费】XTuner 是一个高效、灵活、全能的轻量化大模型微调工具库。它帮助开发者提供一个简单易用的平台,可以对大语言模型(LLM)和多模态图文模型(VLM)进行预训练和轻量级微调。XTuner 支持多种微调算法,如 QLoRA、LoRA 和全量参数微调。
项目地址:https://github.com/InternLM/xtuner
