# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
人形机器人对跳舞这件事,如今是越来越擅长了。
比如跳一支查尔斯顿舞,一分四十秒的丝滑摇摆,稳定得像踩着节拍器:
不过,它们能否像人类一样自如切换跳舞、体操、日常操作等不同的动作模式?
北京大学与BeingBeyond团队联合研发的BumbleBee系统给出了最新答案:通过创新的“分治-精炼-融合”三级架构,该系统首次实现人形机器人在多样化动作中的稳定控制。
传统人形机器人控制策略长期面临两大核心挑战:
BumbleBee系统通过“分治-精炼-融合”三级架构,首次在单一控制框架内实现从专家策略优化到通用全身控制的跨越,为通用具身智能控制提供了全新解决方案。
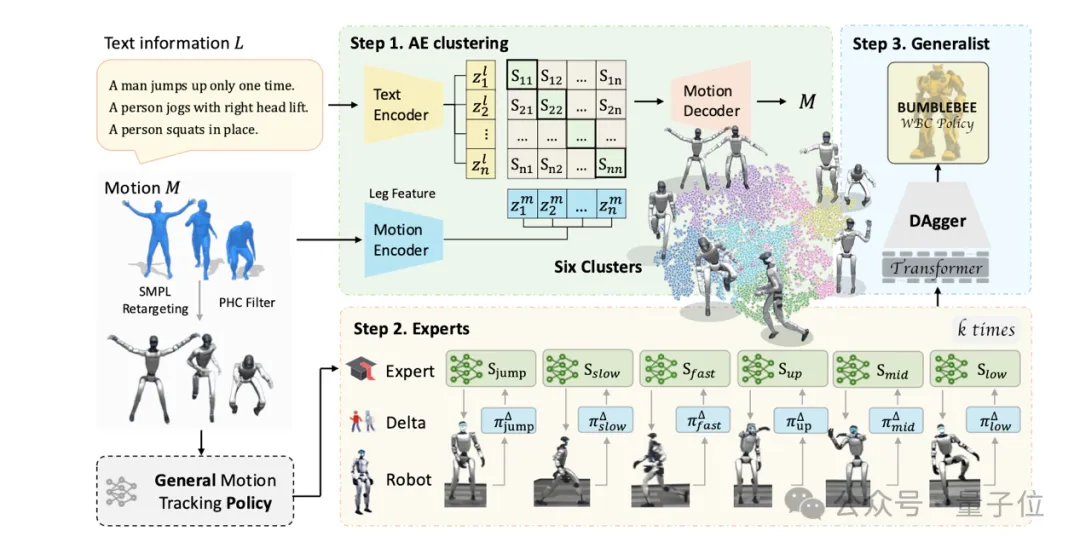
运动-语义联合驱动的动作分类:构建动作理解的“双通道”
系统通过多模态特征构建与联合隐空间对齐,实现动作在运动学与语义层面的双重表征:

仿真到现实的差异建模:弥合“现实鸿沟”
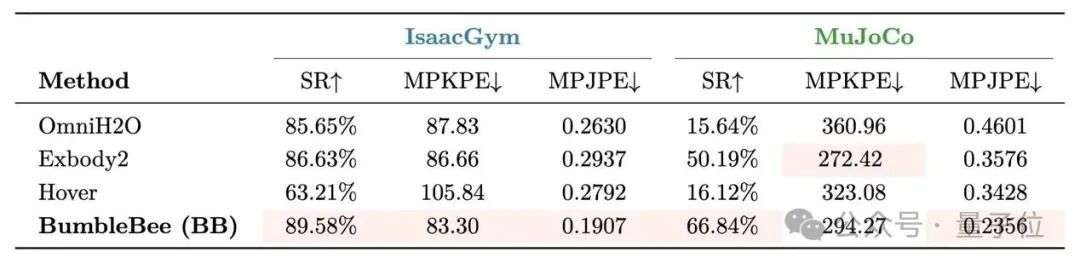
仿真环境:超越基线的全面优势
研究人员在IsaacGym和MuJoCo仿真环境进行了全面评估,使用任务成功率(SR)、关节角误差(MPJPE)、关键点误差(MPKPE)等指标对比现有方法:
在更接近真实的MuJoCo环境中,BumbleBee的成功率达到66.84%,显著优于其他基线(最高仅50.19%)。
真实机器人:稳定与灵活的双重验证
在Unitree G1平台上,系统表现出以下特性:

接下来,研究团队计划在以下方向持续突破:
项目主页:https://beingbeyond.github.io/BumbleBee/
论文链接:https://arxiv.org/abs/2506.12779v2
文章来自于微信公众号“量子位”。



