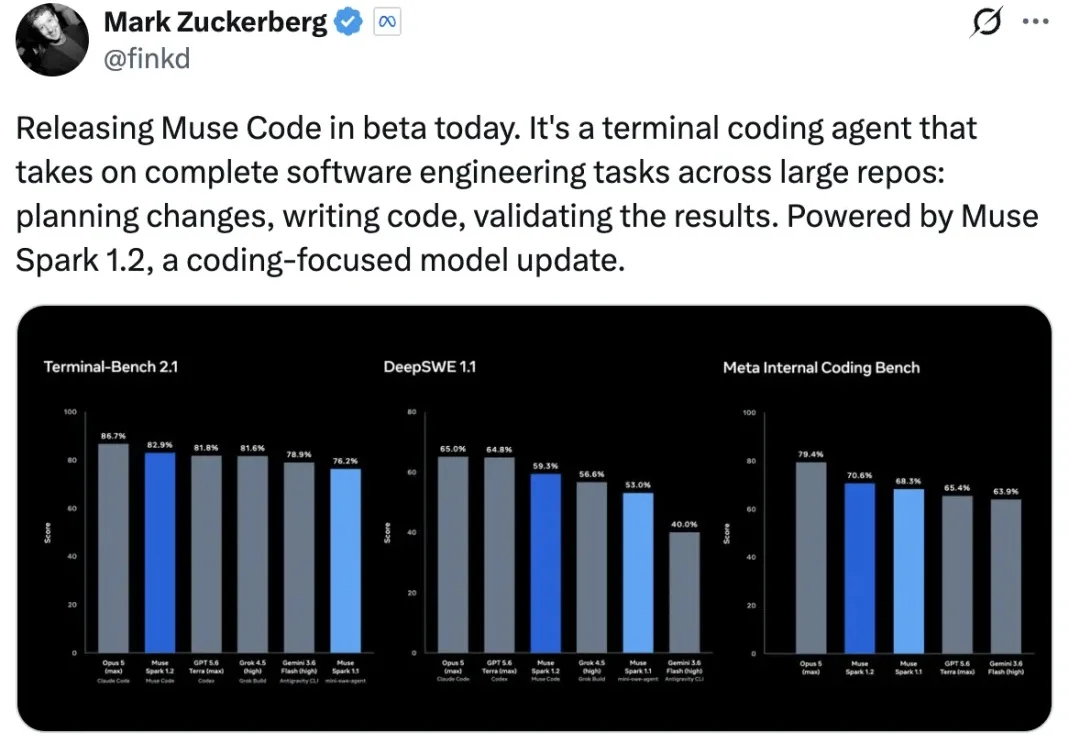
Meta首款编程Agent来了!背后模型能力直追Opus 5
Meta首款编程Agent来了!背后模型能力直追Opus 5终于,Meta 下场做 Coding Agent 了。
来自主题: AI资讯
5283 点击 2026-08-06 16:05
 搜索
搜索
终于,Meta 下场做 Coding Agent 了。
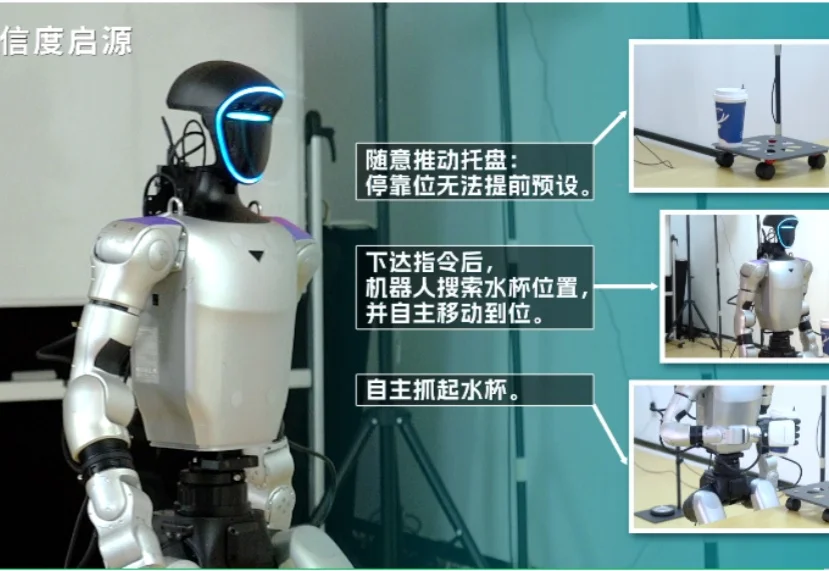
7 月中旬的一天,清华科技园的一处办公区, 一台人形机器人站在屋子中央,身后没有风扇轰鸣的 GPU 机柜,不远处是两张落满公式的书写板。
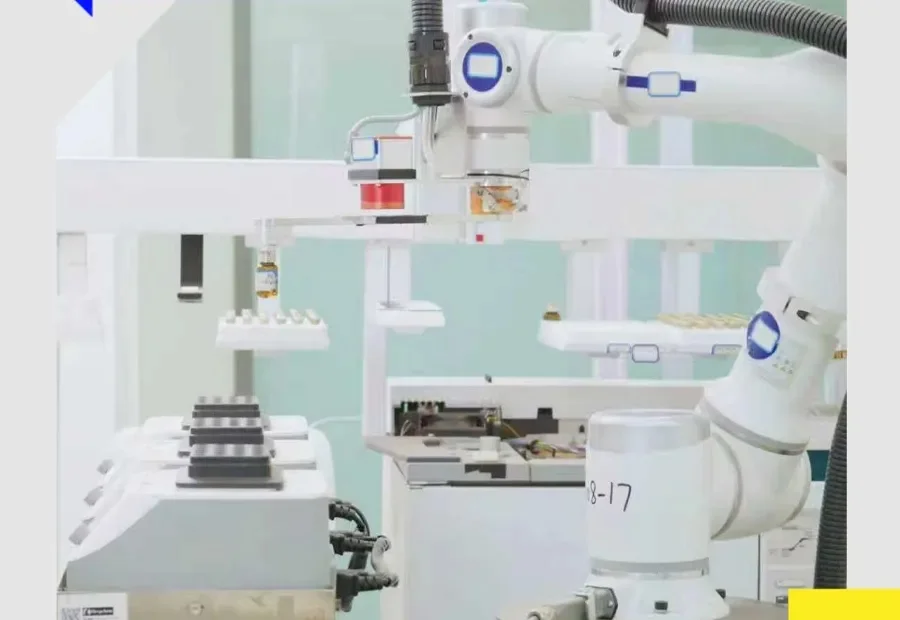
硬氪获悉,近日AI新材料企业北京和光智成科技有限公司(以下简称“和光智成”)完成天使轮数千万融资,此次融资将主要用于团队扩招与自主实验室扩容。
看 Agent 新品,对我来说已经是例行公事了。
时隔近两年,李飞飞终于再做客a16z,畅谈空间智能和World Labs在机器人赛道上的全盘布局。
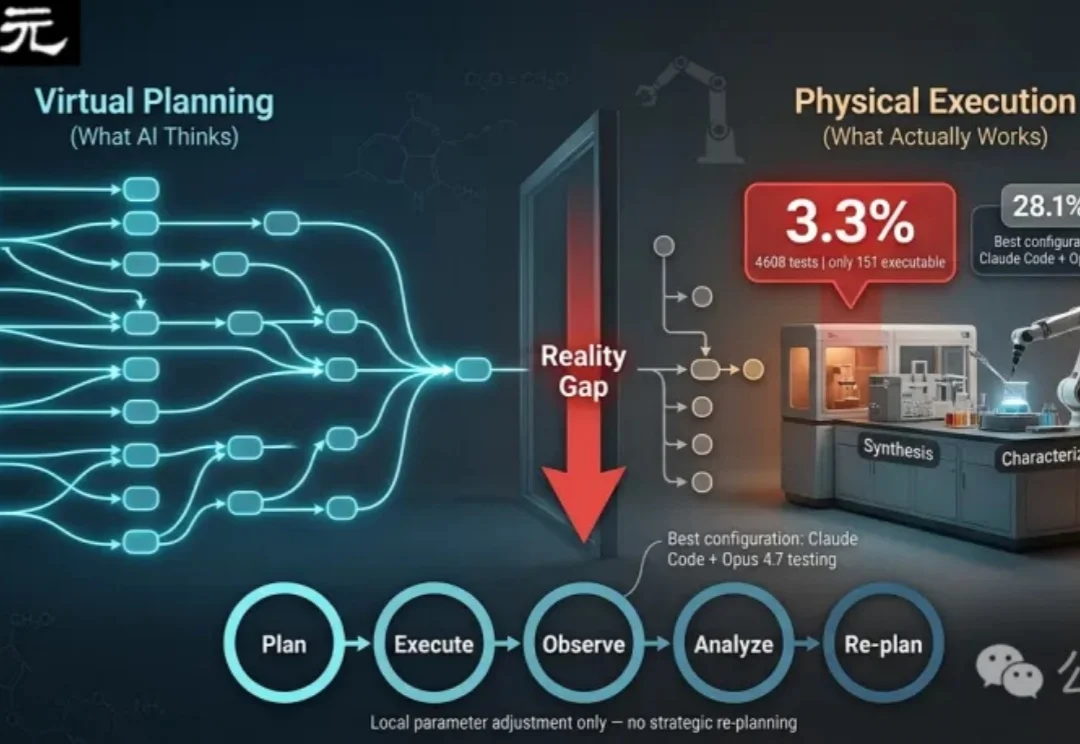
我们如何判断人工智能是否已经足够聪明,能够从事科学研究,实现端到端的自主科学发现?
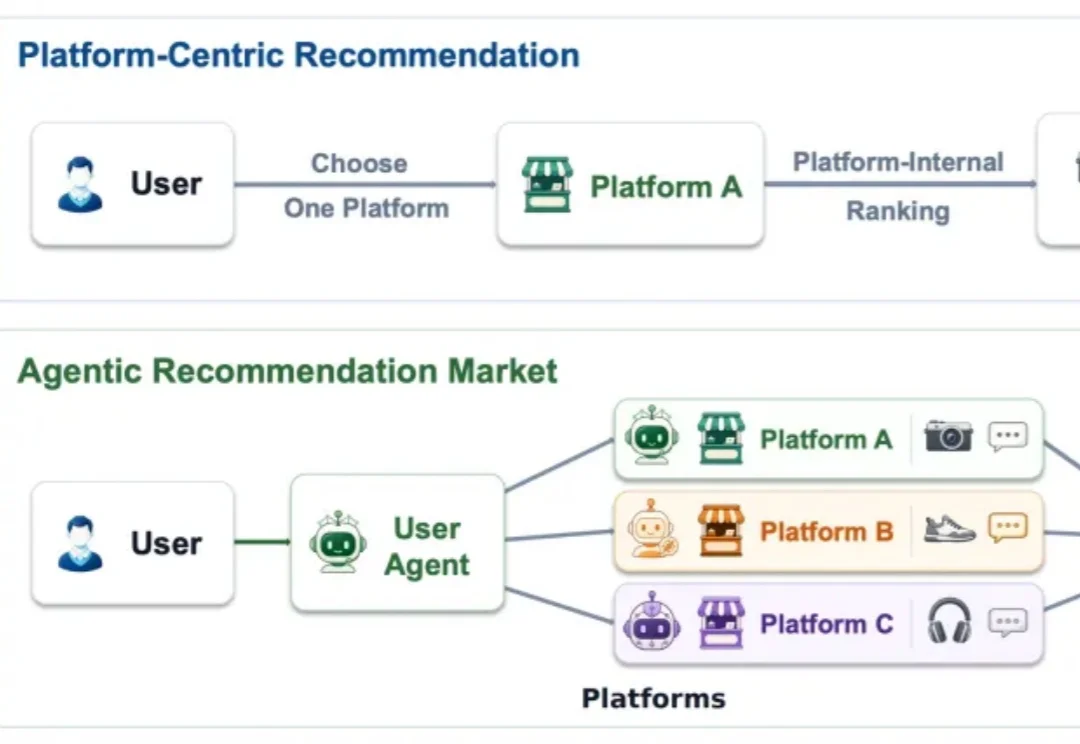
你有没有想过,有一天你买东西,不再需要打开购物软件挨个搜索,而是直接对你的AI助手说一句“我想买一把适合初学者的吉他”,它就能跑遍全网,把最好的几个选项摆在你面前,还附带理由?
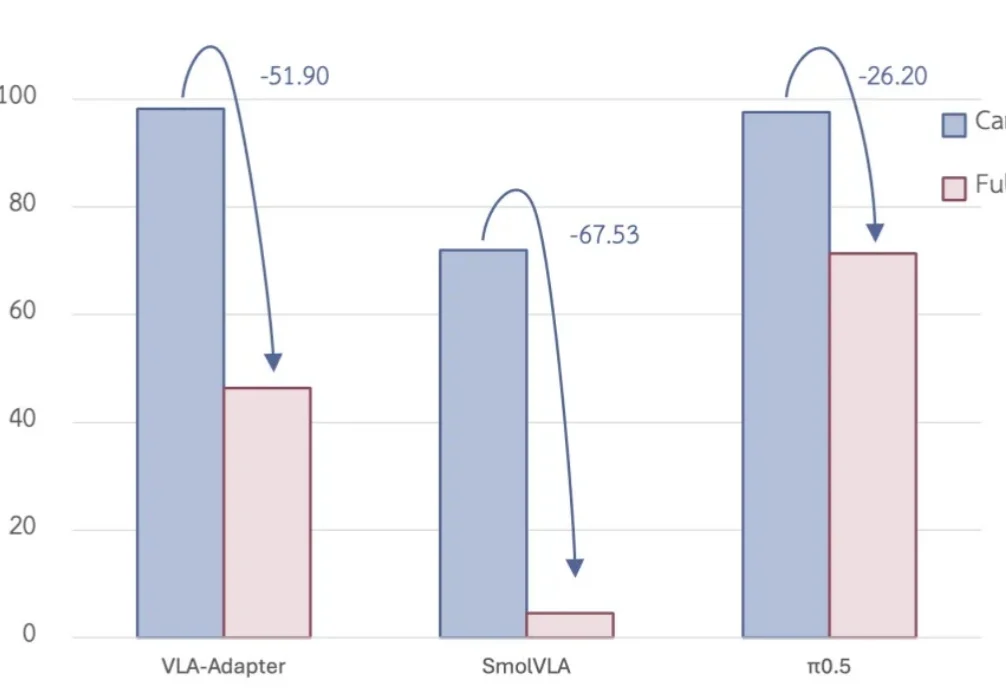
作为具身智能最主流的路线之一,VLA 快速发展的同时也因为其各种问题被诟病。其中最主要的痛点之一便是指令泛化能力。

据 The Information报道,创始人张一鸣在上个月的一场内部会议上向员工明确表达了这一立场,也让外界难得一窥他对字节跳动AI发展路线的思考。外媒披露,在Seed团队内部,关于公司是否应该转向蒸馏技术的争论由来已久。今年,国内竞争对手开源模型的快速发展给字节跳动带来了更大的压力。员工们称,每当有一个强大的中国开源新模型发布,字节跳动内部关于蒸馏的争论就会升温。

国内唯一做多模态长记忆的公司——丘脑智能,推出原生多模态记忆基座,押注AI从通用走向个性化,最终走向主动智能。