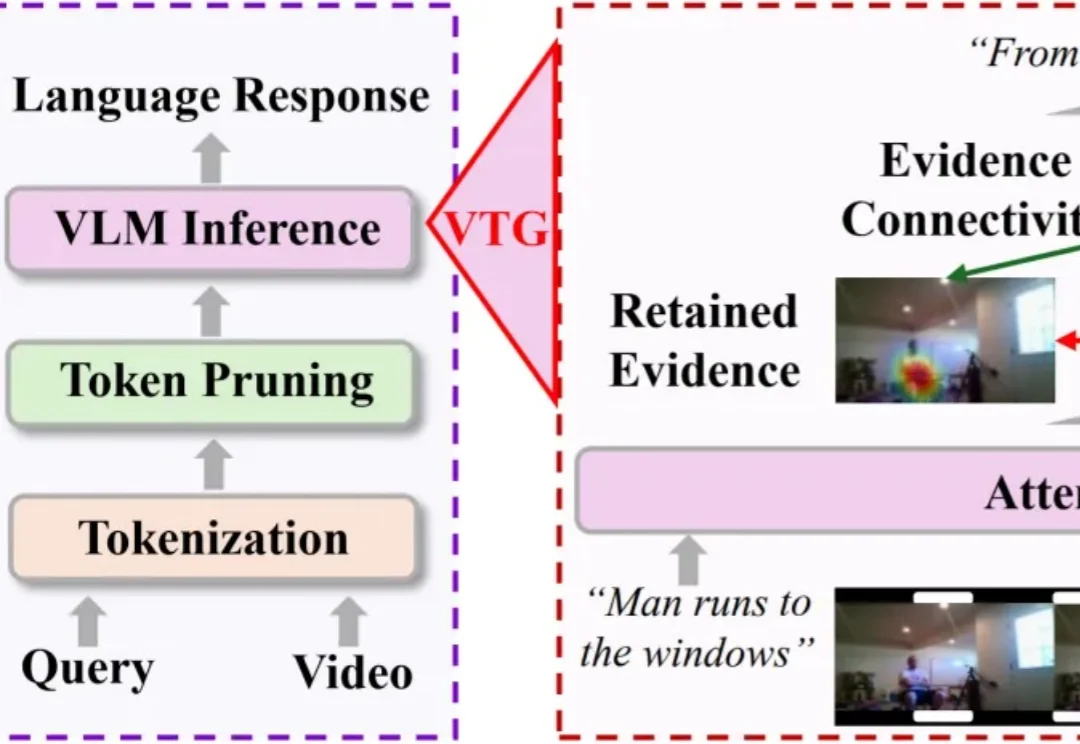
三类视觉Token分配,能直接解决高压缩时序碎片化 | ECCV‘26
三类视觉Token分配,能直接解决高压缩时序碎片化 | ECCV‘26长视频理解,正在成为多模态大模型的重要能力。
来自主题: AI技术研报
6613 点击 2026-07-30 15:57
 搜索
搜索
长视频理解,正在成为多模态大模型的重要能力。
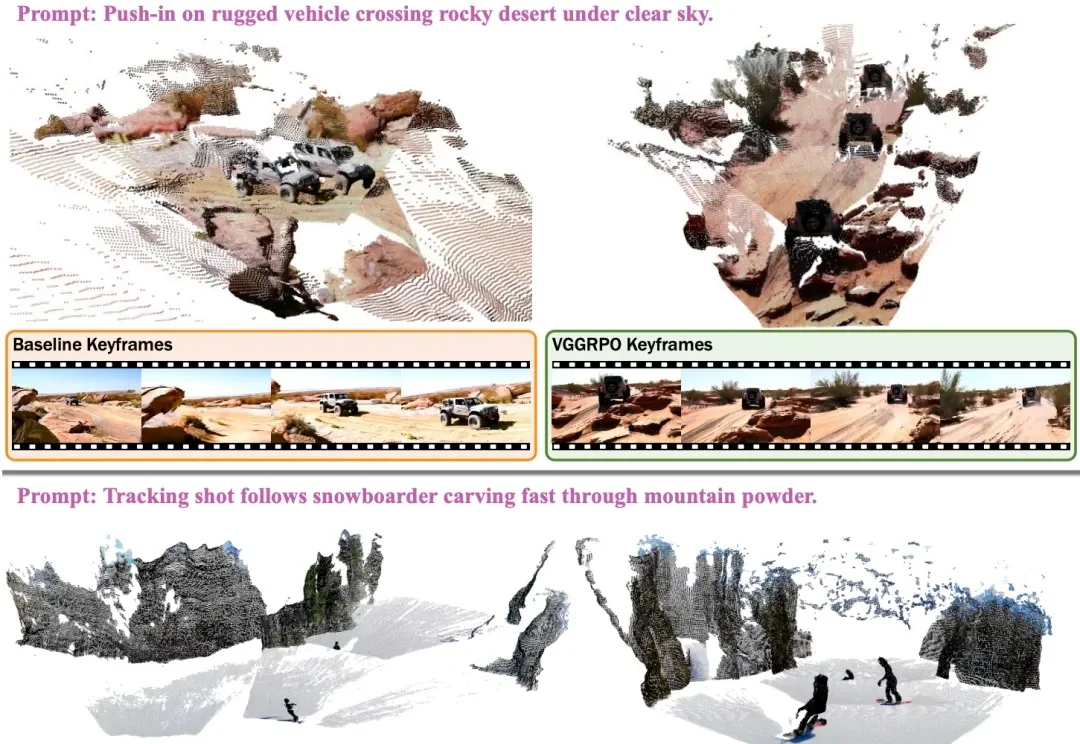
大规模视频扩散模型,画面越来越真,却总在“物理定律”上栽跟头。
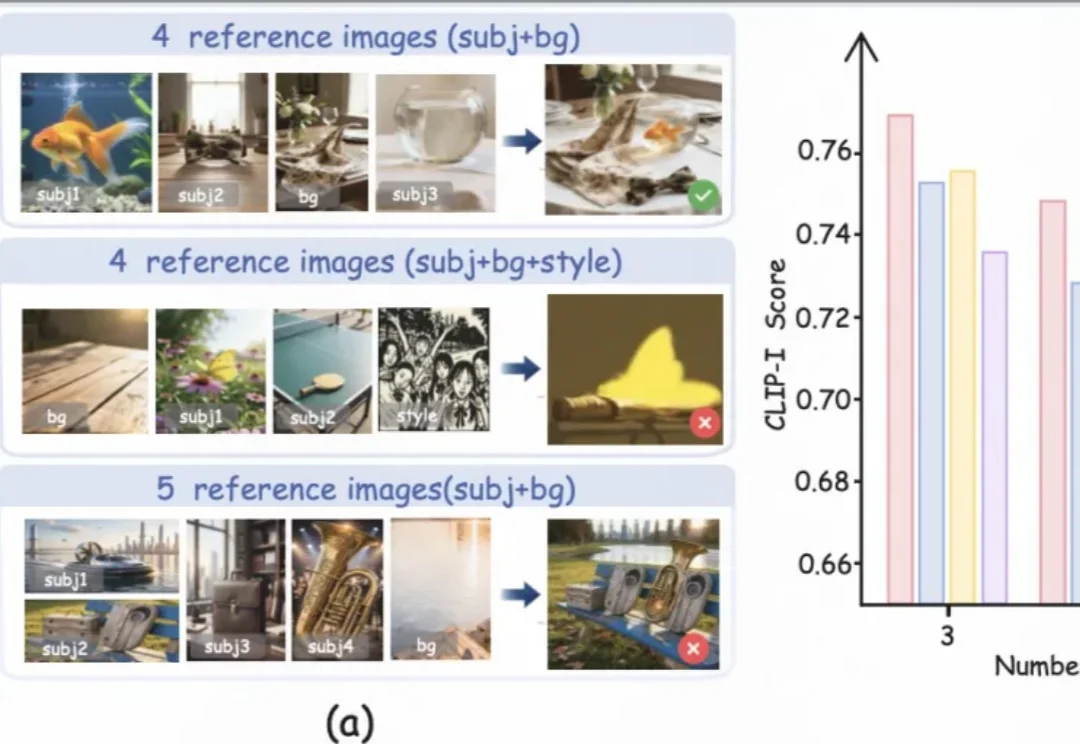
给图像生成模型一张人物参考图,它大概率能抓住身份特征。
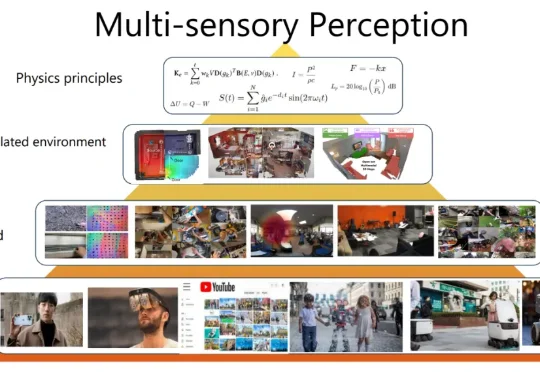
以往的空间音频模型,要么受限于实验室的苛刻采集条件,要么被高昂的人工标注成本卡住脖子。而团队的核心洞察是:相机的自运动本身就是一种免费的监督信号。当相机转动时,声源在声场中的相对位置随之改变——这种变化无需人工标注,模型即可从中学习空间对应关系。这项工作入选CVPR 2025 Highlight,投稿论文前2%。

近日,来自清华大学等单位的研究团队提出了AutoMIA,一种自动生成镜像错觉艺术的 AI 设计方法,用户仅需任意指定两张图片,分别对应镜子前和镜子中的图案,AutoMIA就可以自动完成3维艺术品的设计,并且支持直接3D打印出来制作艺术品。
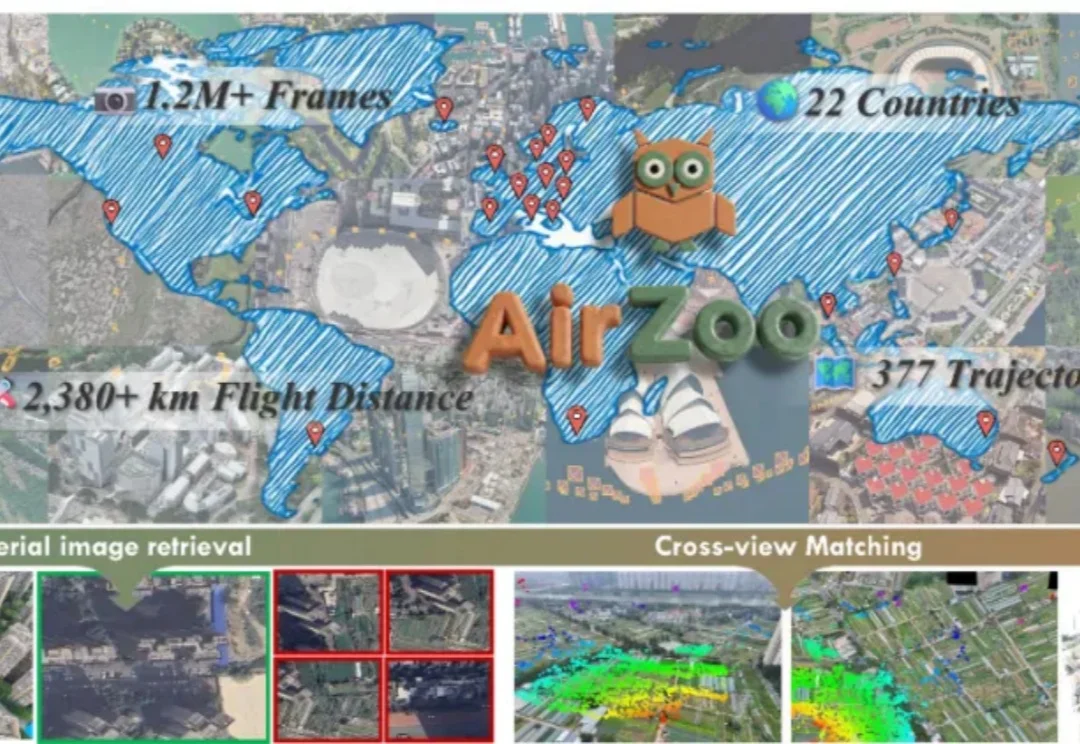
国防科技大学虚拟现实与视觉计算团队(SAW Lab)联合先进制导与控制技术国家级重点实验室等推出面向航拍几何 3D 视觉的统一大规模数据集与评测基准 「AirZoo」。

一个月前的CVPR现场,一家中国具身智能公司的展台被围得水泄不通。
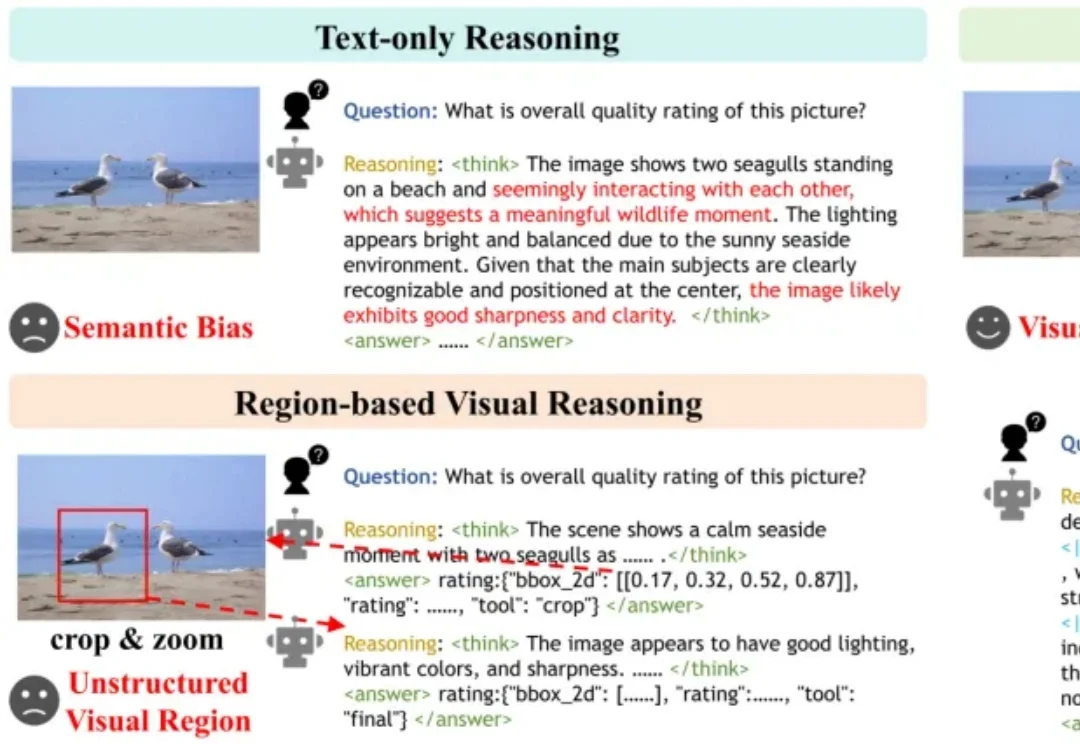
让大模型给一张图片打“质量分”,它其实经常看走眼。
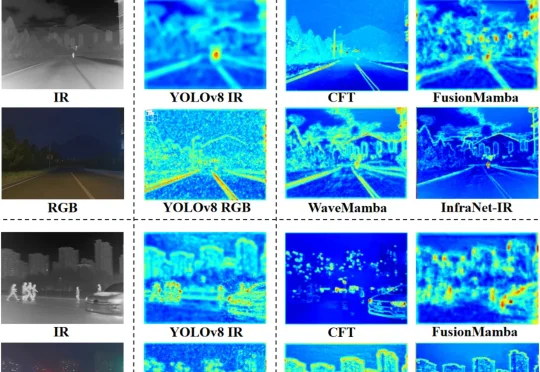
在讨论 RGB-IR 目标检测时,「两种模态互补」几乎是默认前提。RGB 擅长保留纹理和颜色,红外图像在弱光条件下更稳定,于是最直接的路线是搭建双分支网络,让它们在中间层不断交换信息。InfraNet 的出发点却来自一个不太符合这一直觉的现象。
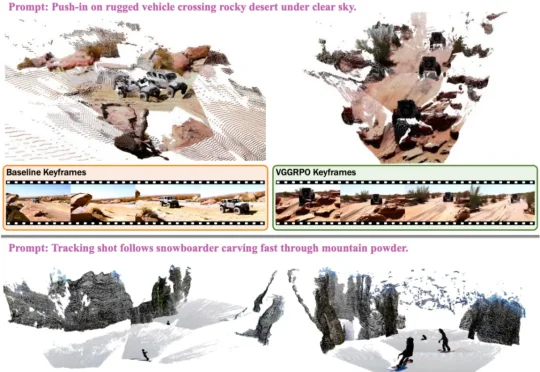
最近,来自 Google、哥本哈根大学、牛津大学等机构的研究者提出了 VGGRPO(Visual Geometry GRPO,收录于 ECCV 2026)。这项工作聚焦于一个核心问题:如何在不牺牲预训练模型泛化能力的前提下,高效地提升视频生成的几何一致性,并使其适用于动态场景。其核心思路是,在隐空间(latent space)中利用 4D 几何奖励,进行几何感知的视频后训练。