腾讯Robotics X开源HyVLA-0.5:基于亚毫米级指套UMI与真机强化,摆脱繁重遥操
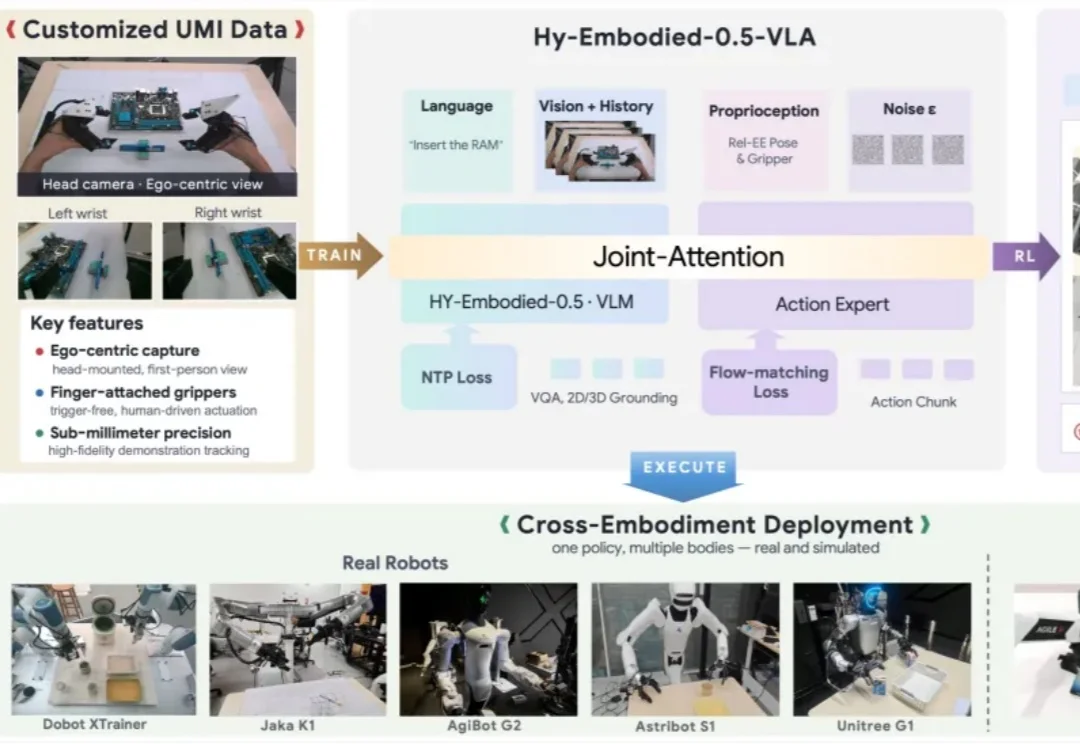
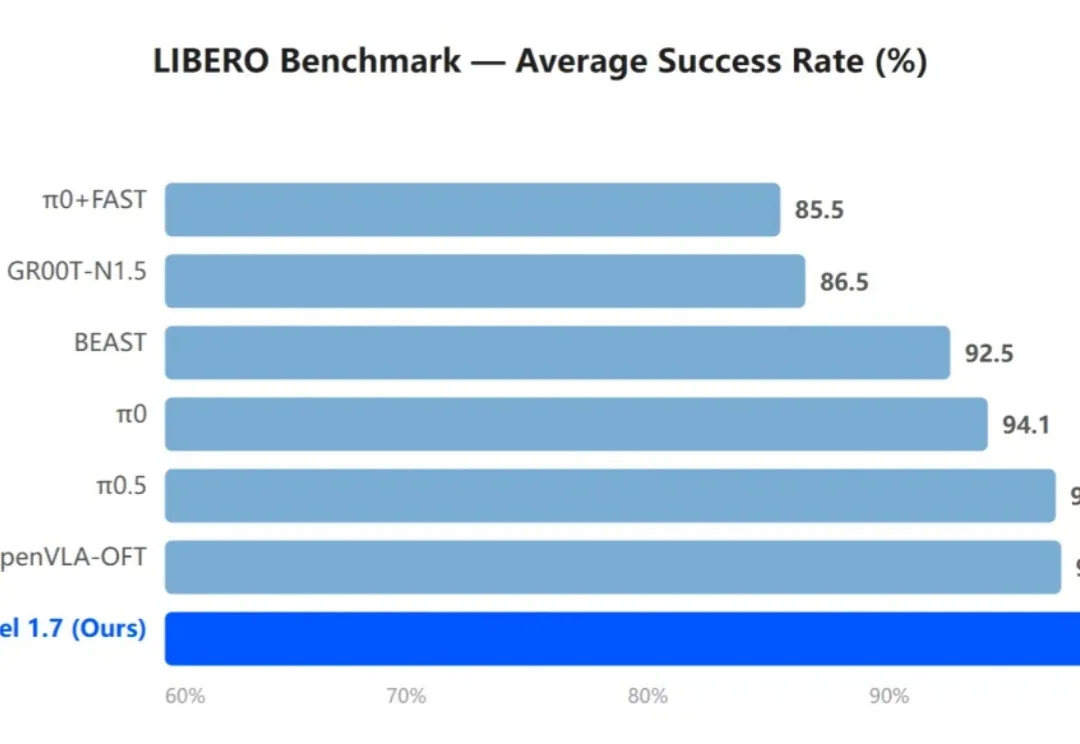
腾讯Robotics X开源HyVLA-0.5:基于亚毫米级指套UMI与真机强化,摆脱繁重遥操6 月 15 日,腾讯 Robotics X、福田实验室与混元团队联合发布面向真实世界机器人操作任务的端到端具身智能模型 Hy-Embodied-0.5-VLA(简称 HyVLA-0.5)。
来自主题: AI技术研报
10196 点击 2026-06-16 10:21
 搜索
搜索
6 月 15 日,腾讯 Robotics X、福田实验室与混元团队联合发布面向真实世界机器人操作任务的端到端具身智能模型 Hy-Embodied-0.5-VLA(简称 HyVLA-0.5)。
具身智能公司戴盟机器人(Daimon Robotics)新近完成亿元A轮融资,本轮融资由汇川产投和中国电信联合投资。与此同时量子位还获悉了关于这家公司的另一则消息——阿里通义实验室前多模态研究专家原玮浩加入戴盟,担任首席AI科学家。

独家获悉,字节跳动多模态负责人周畅管理范围再次扩大,原由李航负责的 Seed Robotics 团队已向周畅汇报月余,李航现以顾问身份负责学术合作方向。字节也正在招聘具身智能技术负责人,负责机器人业务整体规划,职级定位为 L8,对标阿里 P10-P11,将向周畅汇报。该岗位候选人主要来自头部具身智能创业公司技术负责人。
这是第一次,机器人学会了用手「盘」:
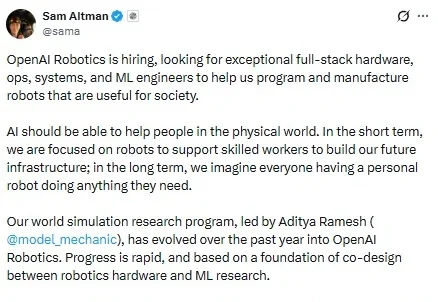
“OpenAI 进军机器人领域!”

连续创业的 York 开启了又一段新征程。过去十几年里,他几乎一直在做软硬一体系统:从计算机视觉、嵌入式,到后来的机器人。他的上一个创业项目——智能购物车 Caper AI,在 2021 年被 Instacart 以 3.5 亿美元收购。

AI科技评论独家消息,前月之暗面后训练与强化学习负责人宋鸿涌(Flood Sung)已于 2025 年 12 月离职,创立机器人公司「北京十六号机器人科技有限公司」(XVI Robotics),公司业务方向聚焦通用人形机器人基座模型。
2026 年,世界动作模型(WAM)在具身智能领域逐渐成为一个集中讨论的方向,英伟达等公司也陆续在这一领域投入资源。
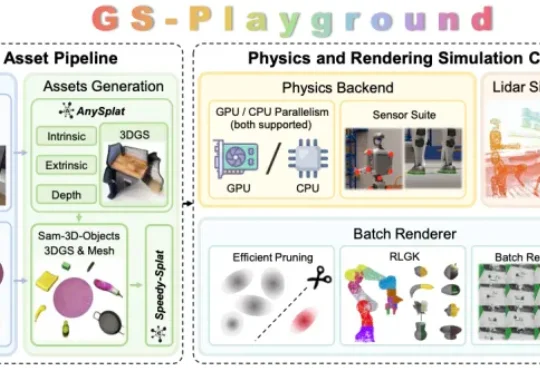
近日,清华大学智能产业研究院(AIR)DISCOVER Lab 联合谋先飞技术、原力灵机、求之科技和地瓜机器人,提出了新一代高通量视觉高保真仿真器 GS-Playground。该成果已被机器人领域国际顶级学术会议 RSS 2026(Robotics: Science and Systems)录用,标志着国内具身智能仿真基础设施在视觉保真度与训练吞吐量两个维度上同时取得了国际领先水平的突破。
还记得之前破产的扫地机器人鼻祖公司 iRobot 吗?最近它的创始人科林·安格尔(Colin Angle),在经历公司破产重整之后拿出了他的新作品。