刚刚,国产预训练具身大模型开源了,让后训练不再是必选项!
刚刚,国产预训练具身大模型开源了,让后训练不再是必选项!2026 年初,国内具身智能赛道掀起了一波开源潮,越来越多团队开始公开自己的视觉-语言-动作(VLA)模型、数据集与训练框架。与此同时,行业竞争也逐渐集中到 benchmark 成绩、任务成功率以及跨任务泛化能力上,尤其是在标准化或已训练任务中的表现。
来自主题: AI技术研报
8430 点击 2026-05-29 09:19
 搜索
搜索
2026 年初,国内具身智能赛道掀起了一波开源潮,越来越多团队开始公开自己的视觉-语言-动作(VLA)模型、数据集与训练框架。与此同时,行业竞争也逐渐集中到 benchmark 成绩、任务成功率以及跨任务泛化能力上,尤其是在标准化或已训练任务中的表现。

刚刚完成新一轮亿元融资的具脑磐石,从成立之初押注的正是这个方向。具脑磐石由朱森华创立。他曾任华为云AI算法创新Lab主任,主导过AI脑科学云平台、盘古具身大模型、全球具身智能产业创新中心等系统级项目。在业内,他被称为“华为具身大脑一号位”。
机器人拉个拉链,到底需不需要“脑子”?

当前,大语言模型(LLMs)和视觉语言模型(VLMs)在语义领域的成功未能直接迁移至物理机器人,归根结底在于其互联网原生的基因。

全新的具身模型空间能力评估范式 Theory of Space 突破了传统静态图文问答的局限,系统性地考察基础模型能否像人一样,在部分可观测的动态环境中,通过自主探索来构建、修正和利用空间信念。该论文已被 ICLR 2026 接收。
极佳视界具身大模型 GigaBrain-0.5M*,以世界模型预测未来状态驱动机器人决策,并实现了持续自我进化,超越π*0.6 实现 SOTA!该模型在叠衣、冲咖啡、折纸盒等真实任务中实现接近 100% 成功率;相比主流基线方法任务成功率提升近 30%;基于超万小时数据训练,其中六成由自研世界模型高保真合成。
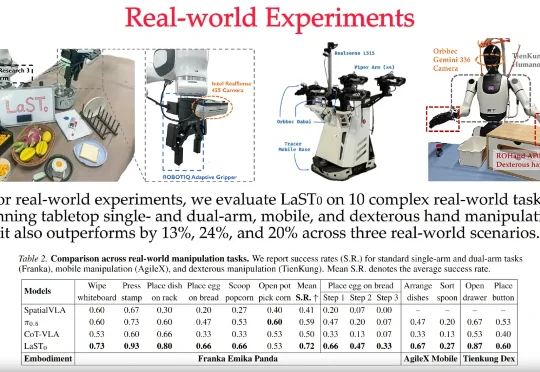
LaST₀团队 投稿 量子位 | 公众号 QbitAI 近日,至简动力、北京大学、香港中文大学、北京人形机器人创新中心提出了一种名为LaST₀的全新隐空间推理VLA模型,在基于Transformer混

用多样化的任务与公开透明的机制,堵上具身大模型刷榜的捷径。

近日,清华大学深圳国际研究生院的机器人博士团队创办的「知有无界」获得卓源亚洲领投、力合科创跟投的种子轮融资。「知有无界」诞生在清华大学王学谦教授的智能机器人实验室,实现了全球首个船舶具身通用大模型,本轮融资后,「知有无界」将会进一步加快在船坞的商业化落地,并持续进行多代产品的研发。

正式入职小米还不到10天,罗福莉的首篇论文,这就来了!针对自驾与具身操作场景的知识迁移难题,MiMo团队提出并开源了全球首个打通这两大领域的跨具身(X - Embodied)基座模型——MiMo-Embodied。