

不同灵巧手,终于可以共用「一套大脑」了
不同灵巧手,终于可以共用「一套大脑」了在机器人操作领域,一个长期悬而未决的核心问题始终困扰着研究者: 面对形态各异的灵巧手,我们是否注定要为每一种手型单独设计表示方式与控制策略?
来自主题: AI技术研报
6291 点击 2026-03-09 09:50
在机器人操作领域,一个长期悬而未决的核心问题始终困扰着研究者: 面对形态各异的灵巧手,我们是否注定要为每一种手型单独设计表示方式与控制策略?
是不是经常纠结于 VLA(视觉 - 语言 - 动作)模型的训练技巧?面对层出不穷的 VLA 算法,是不是常常感到眼花缭乱,不知道哪种数据模态、训练策略最有效? 别急,丰田研究院(TRI)和清华大学刚刚

资本正在加速押注具身智能的下一阶段。

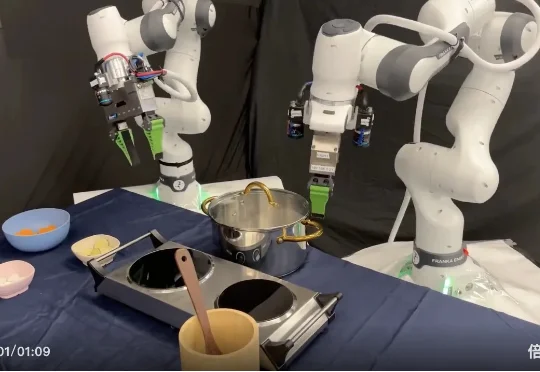
导读:近日,位于中关村的深度机智全球首次使用全新范式——人类学习,在多个国际 Benchmark 上取得 SOTA,史无前例地使用全新架构(仅使用人类第一视角数据、零真机数据)击败 Physical Intelligence 和英伟达等头部巨头二十多个百分点,并在两会开幕首日被央视报道。

又一位地平线系具身智能创业者拿到大额融资。
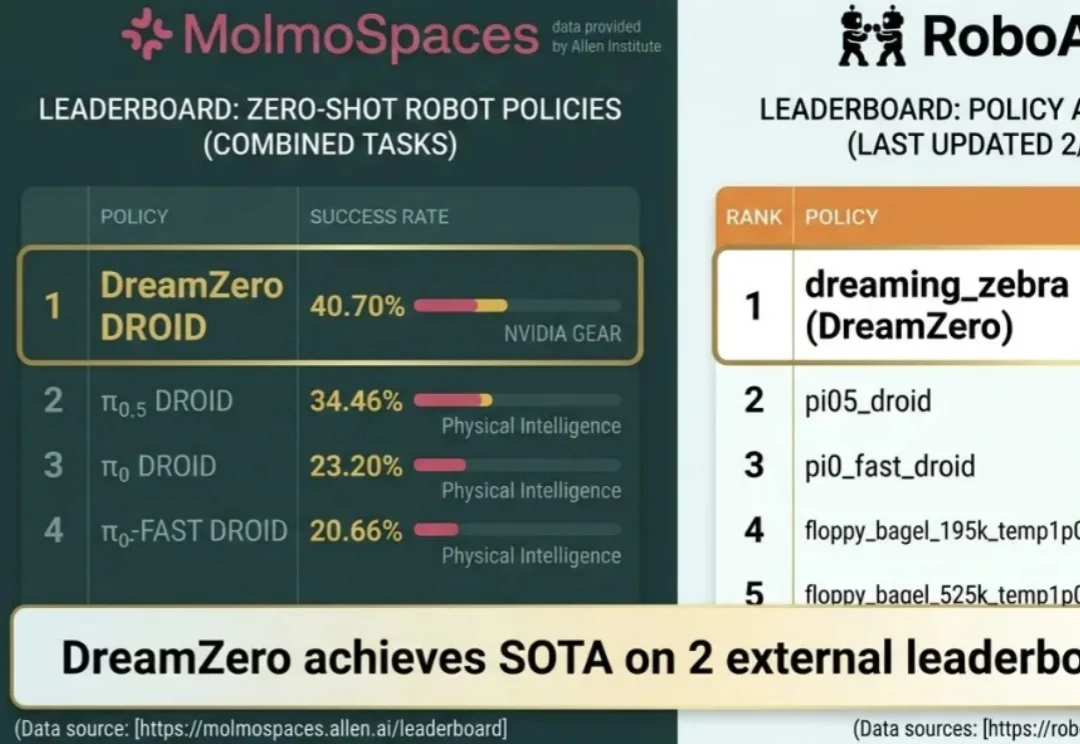
近日,NVIDIA 发布的世界 - 动作模型 DreamZero,在两项颇具代表性的机器人基准测试 RoboArena 、MolmoSpaces 上双双登顶。

全新的具身模型空间能力评估范式 Theory of Space 突破了传统静态图文问答的局限,系统性地考察基础模型能否像人一样,在部分可观测的动态环境中,通过自主探索来构建、修正和利用空间信念。该论文已被 ICLR 2026 接收。
小雨智造预计,智能焊接机器人需求可达千万台量级,只要占据10%份额,就完全具备成为“爆品”的市场条件。
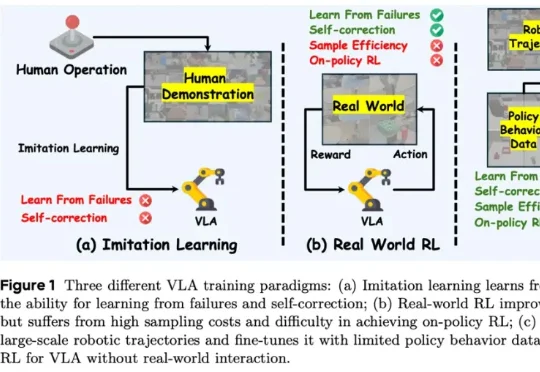
香港科技大学 PEI-Lab 与字节跳动 Seed 团队近期提出的 WMPO(World Model-based Policy Optimization),正是这样一种让具身智能在 “想象中训练” 的新范式。该方法无需在真实机器人上进行大规模强化学习交互,却能显著提升策略性能,甚至涌现出 自我纠错(Self-correction) 行为。

银河通用机器人宣布完成 25 亿元新一轮融资,投资方包括国家人工智能产业基金(国家大基金三期)、中国石化、中信投资控股、中国银行、上汽集团金控、中芯聚源、亦庄国投、未来产业投资、鲲鹏基金、无锡创投、福建产投等及多家老股东继续追加投资。