
Ψ₀刚刚开源了!迈向通用人形机器人的基座模型
Ψ₀刚刚开源了!迈向通用人形机器人的基座模型人形机器人在春晚舞台上大放异彩!然而,人们在看惯了机器人跳舞、后空翻,乃至武术表演之后,不禁开始思考:机器人何时才能真正走进大众生活,解决日常生活中的琐碎任务,从而解放人类的双手?
来自主题: AI技术研报
7787 点击 2026-03-25 13:40
人形机器人在春晚舞台上大放异彩!然而,人们在看惯了机器人跳舞、后空翻,乃至武术表演之后,不禁开始思考:机器人何时才能真正走进大众生活,解决日常生活中的琐碎任务,从而解放人类的双手?

宇树的毛利率,比苹果巅峰时期的数值还要高,很大程度上,源自创始人王兴兴对成本的极致管控。
又一位华为天才少年加入具身智能创业战场。
在自动驾驶、具身智能、AR/VR应用中做3D重建,大家都想解决一个终极问题: 模型能不能像人一样,一边往前看,一边持续构建三维世界?

“对具身智能来说,力觉比视觉更重要。”
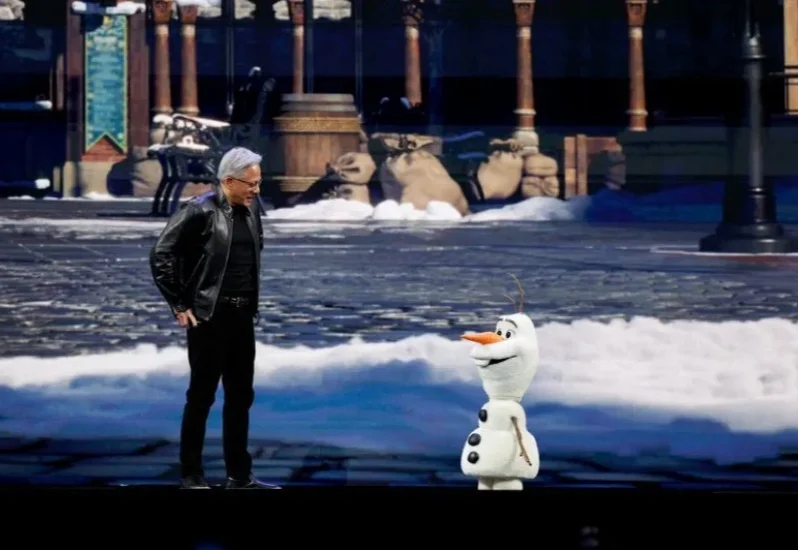
小时候看《冰雪奇缘》,相信有不少小孩问过父母:雪宝是真的吗?
GTC 2026,比往年更热。

具身智能(Embodied AI)正从算法狂欢转向物理落地的「深水区」。在FLEXIVERSE 2026发布会上,非夕科技不仅通过Enlight、Orion、MICO等新品完成了从「单臂」到「通用机器人智能底座」的升维,更在现场达成了2000台机器人的战略合作签约。全身皮肤级力感知、720°超限旋转、双臂原生协同、无源吸附壁虎夹爪——
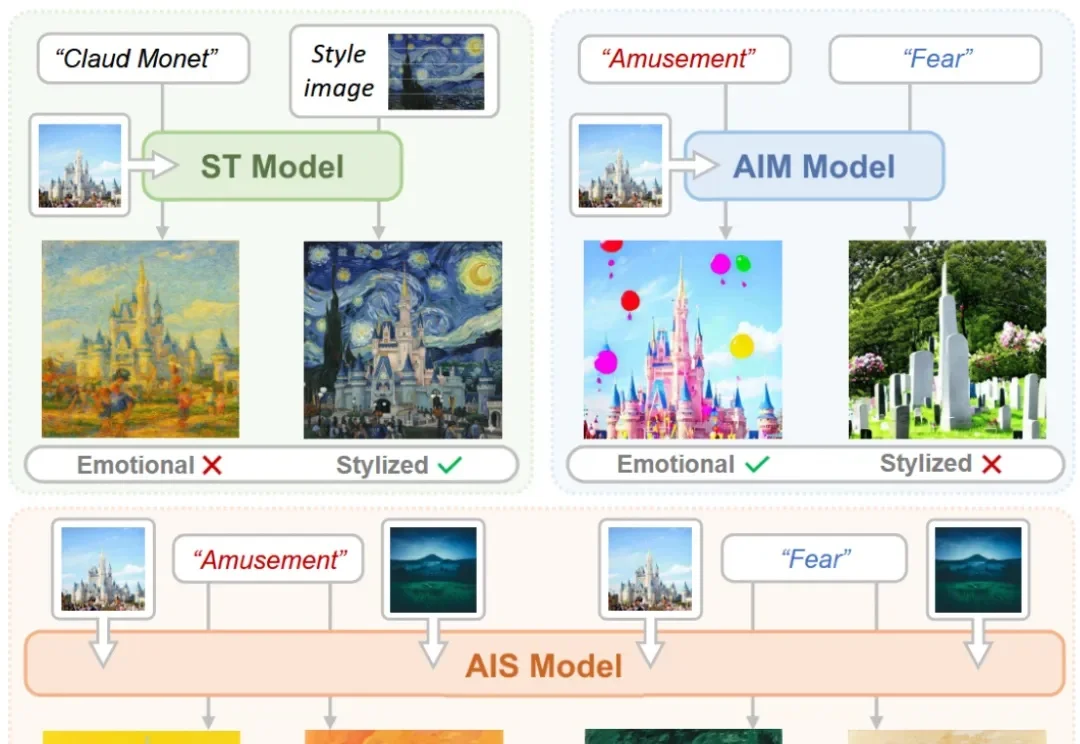
EmoStyle 由深圳大学可视计算研究中心黄惠教授课题组独立完成,第一作者为杨景媛助理教授,第二作者为研二硕士生柏梓桓。深圳大学可视计算研究中心(VCC)以计算机图形学、计算机视觉、人机交互、机器学习、具身智能、可视化和可视分析为学科基础,致力前沿探索与跨学科创新。
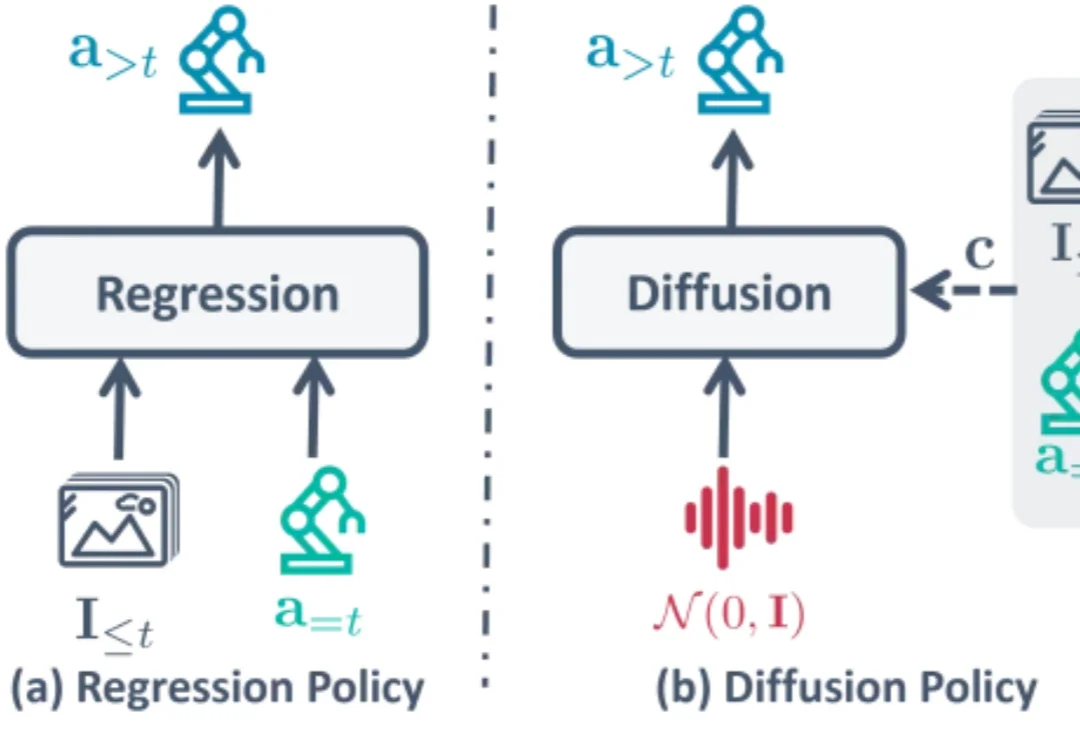
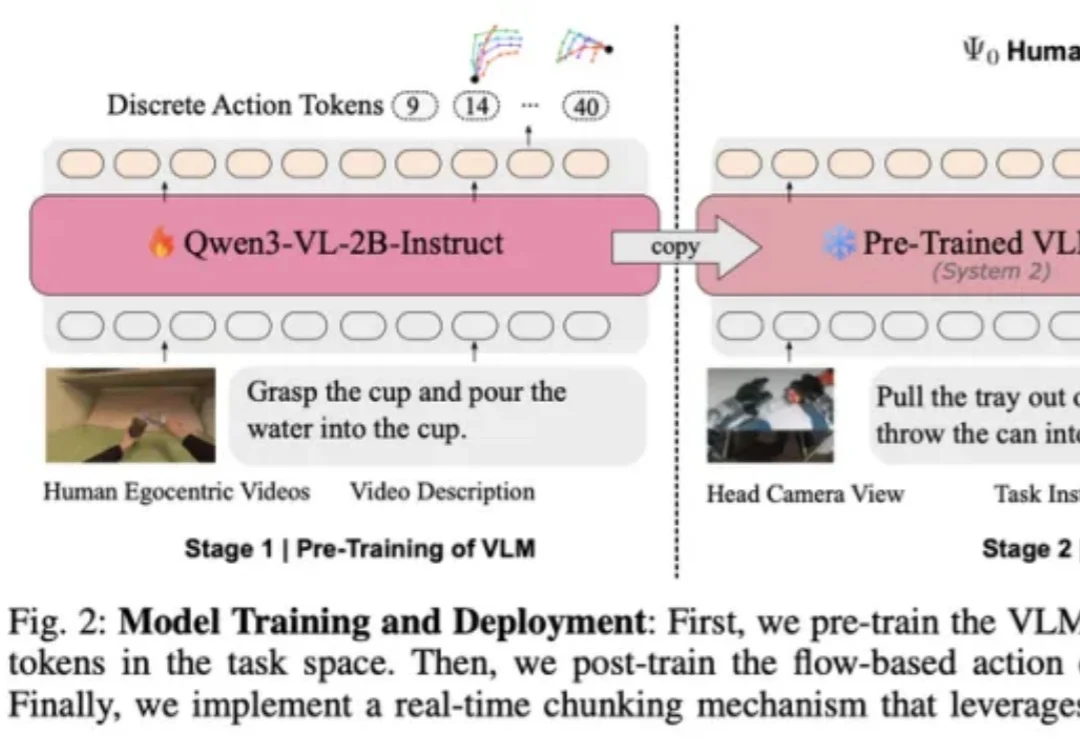
在机器人领域,扩散策略(Diffusion Policy)已经成为了标准模仿学习策略和 VLA 动作生成范式,但其「从随机噪声中迭代解噪」的机制带来了不容忽视的推理延迟。如果机器人不再从随机高斯噪声开始「盲猜」,是否可以基于「刚刚做了什么」来预测「下一步做什么」呢?