
刚刚,李飞飞买下仿真公司SceniX,World Labs首笔收购剑指具身智能
刚刚,李飞飞买下仿真公司SceniX,World Labs首笔收购剑指具身智能“AI教母”李飞飞创办的World Labs正式宣布收购美国机器人仿真初创公司SceniX。这笔交易是World Labs成立以来的首笔公开收购,也标志着这家以“空间智能”为旗帜的明星创企,正式将业务边界从3D世界生成推进到物理机器人训练领域。
来自主题: AI资讯
9250 点击 2026-07-22 17:41
 搜索
搜索
“AI教母”李飞飞创办的World Labs正式宣布收购美国机器人仿真初创公司SceniX。这笔交易是World Labs成立以来的首笔公开收购,也标志着这家以“空间智能”为旗帜的明星创企,正式将业务边界从3D世界生成推进到物理机器人训练领域。
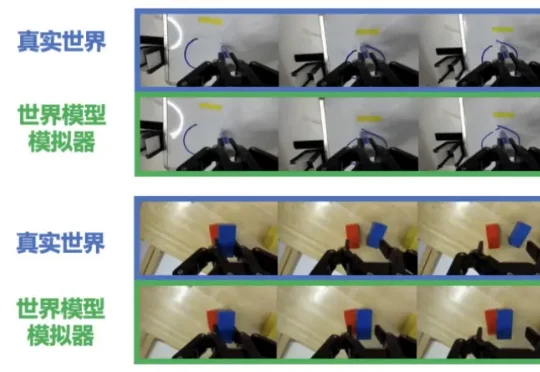
蚂蚁灵波选择了后一条路:开源 LingBot-Video。这是一个面向具身智能的视频生成基座模型,也是一套专为机器人场景设计的 DiT 视频预训练范式。通用视频模型更多学习画面变化、镜头运动和视觉风格;LingBot-Video 则把重点放在动作、任务、交互和物理环境变化上,面向世界预测、动作理解和机器人训练构建视频生成基座。
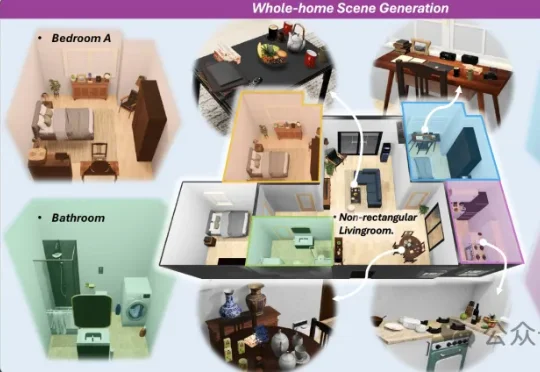
一觉睡醒,具身智能公司竟然也开始搞房地产了?!刚刚,大晓机器人联合港中文MMLab发布了一个新项目——Kairos-Homeworld,全球首个实现全屋三维生成与物体级全交互的统一框架。
2026 年,“世界模型” 正在成为具身智能行业的高频词。越来越多公司开始将自己的技术路线表述为机器人世界模型,试图用可学习的环境模型提升机器人训练效率。
机器之心编辑部 整个具身智能领域都在探索世界模型的实用化路径。这个被寄予厚望的「数字模拟器」,本应成为机器人训练的核心工具,却因物理保真度低等问题成为「空中楼阁」。 去年年中,谷歌发布了 Genie-
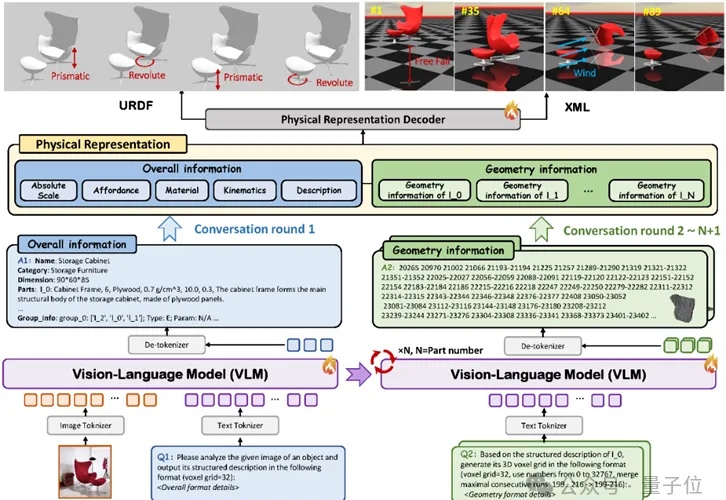
一张照片,就能生成可直接用于仿真的3D资产。

还得是大学生会玩啊(doge)! 网上正高速冲浪中,结果意外发现:有男大竟找了个机器人队友?而且机器人还相当黏人(bushi~ 白天超市打工它要跟着,一看东西装好就立马乐颠颠帮忙拉小推车,上楼下楼忙个不停:

注意看,眼前这个男人暂且叫他小帅。 你可能想不到,他只是在厨房里优雅地煎牛排做做家务,每小时最高能赚进1000多块(150美元)。 怪不得小帅天天上班喜笑颜开。
第一作者陈昌和是美国密歇根大学的研究生,师从 Nima Fazeli 教授,研究方向包括基础模型、机器人学习与具身人工智能,专注于机器人操控、物理交互与控制优化。
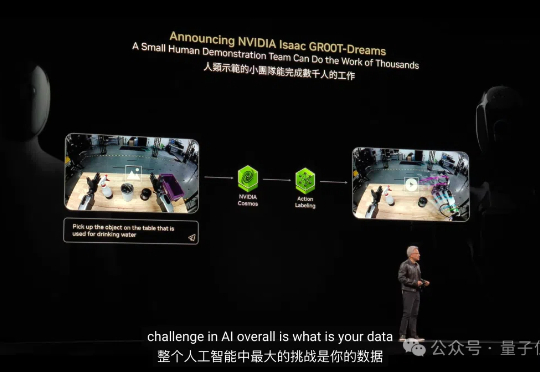
「仿生人会梦见电子羊吗?」这是科幻界一个闻名遐迩的问题。现在英伟达给出答案:Yes!而且还可以从中学习新技能。如下面各种丝滑操作,都没有真实世界数据作为训练支撑。仅凭文本指令,机器人就完成相应任务。