
深度|从 OpenClaw 们自掏腰包补贴,看中国模型又一个全球时刻
深度|从 OpenClaw 们自掏腰包补贴,看中国模型又一个全球时刻“免费补贴”在硅谷从来不只是价格标签,而往往是战略指南针。
来自主题: AI资讯
10810 点击 2026-02-02 09:32
 搜索
搜索
“免费补贴”在硅谷从来不只是价格标签,而往往是战略指南针。
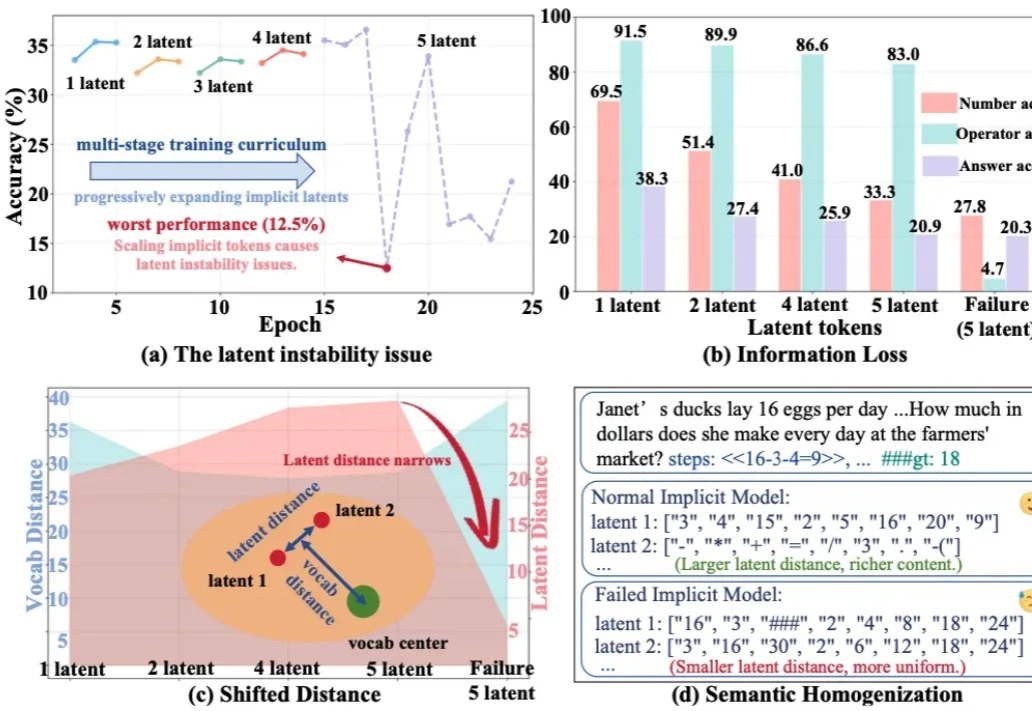
今天推荐一个 Implicit Chain-of-Thought(隐式推理) 的最新进展 —— SIM-CoT(Supervised Implicit Chain-of-Thought)。它直击隐式 CoT 一直「扶不起来」的核心痛点:隐式 token 一旦 scale 上去,训练就容易塌缩到同质化的 latent 状态,推理语义直接丢失。

世界模型真的变天了!今天,谷歌正式发布重磅世界模型原型产品“Project Genie”,只需一句话或一张图,就能一键生成可玩、可交互的实时虚拟世界。 它的重磅程度,让谷歌“掌舵人”劈柴哥和 Google DeepMind 创始人哈萨比斯亲自为它站台。
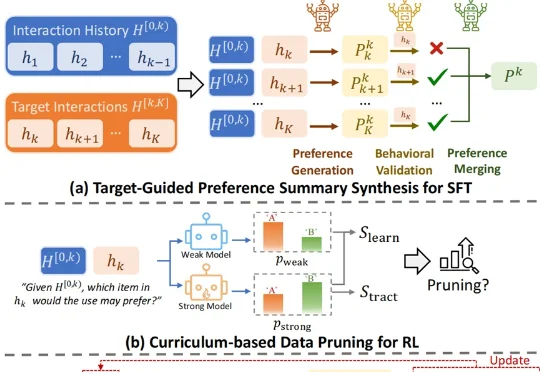
怎样做一个爆款大模型应用?这恐怕是2026年AI开发者们都在关注的问题。当算力和性能不再是唯一的护城河,“爆款”意味着大模型要能精准地“抓住”每一名具体的用户,而个性化正是其中的关键技术之一。
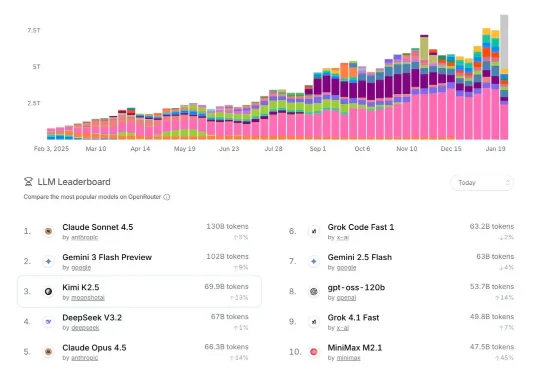
《智能涌现》获悉,近期Kimi在和投资人的沟通中表示,公司的海外收入已超过国内收入,新模型K2.5发布后,全球付费用户已有4倍增长。这一变化恰好发生在新一代模型K2.5发布后的短短几天内。
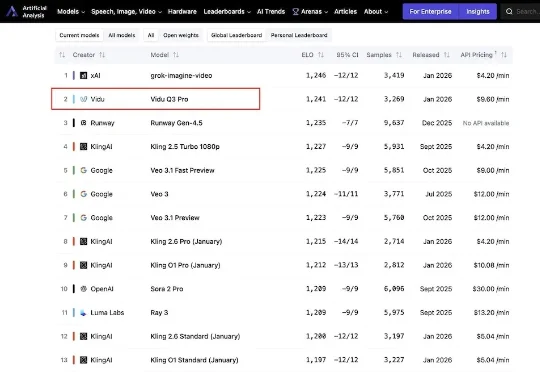
今日,来自生数科技的AI视频模型Vidu Q3 Pro登上国际权威AI基准平台Artificial Analysis榜单,位列中国第一,全球第二。这是最新榜单内,首个打入国际第一梯队的国产视频生成模型。

AI生成一张图片,你愿意等多久?在主流扩散模型还在迭代中反复“磨叽”、让用户盯着进度条发呆时,阿里智能引擎团队直接把进度条“拉爆”了——5秒钟,到手4张2K级高清大图。
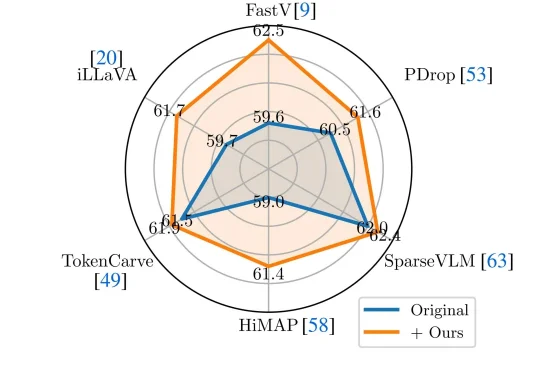
近年来,Vision-Language Models(视觉—语言模型)在多模态理解任务中取得了显著进展,并逐渐成为通用人工智能的重要技术路线。

国产算力基建跑了这么多年,大家最关心的逻辑一直没变:芯片够不够多?但对开发者来说,真正扎心的问题其实是:好不好使?
谷歌正式开放世界模型Genie 3的实验性研究原型Project Genie。一夜间暴打了游戏公司市值。《GTA》开发商Take-Two Interactive缩水10%,在线游戏平台Roblox 下跌了超过12%,最惨的是游戏引擎制造商Unity下跌了21%。