Meta蔡志鹏新作VLM³:全面揭示三维视觉的Bitter Lesson
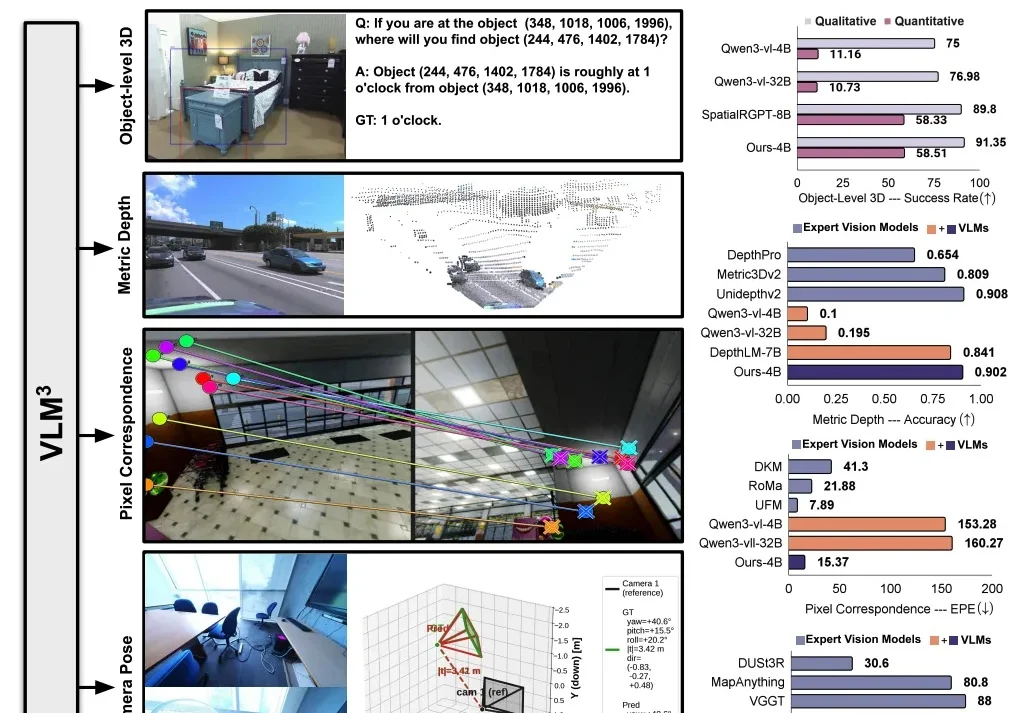
Meta蔡志鹏新作VLM³:全面揭示三维视觉的Bitter LessonMeta 发布了一项令人震撼的研究工作 VLM³,首次揭示了三维视觉学习的 Bitter Lesson:标准的视觉语言模型 + scale 数据就是最简单有效的范式,针对特定任务的架构、损失函数以及数据增强的设计,甚至是 regression 的 formulation,均不是三维视觉学习的必要条件。
来自主题: AI技术研报
6440 点击 2026-06-09 14:31