
xAI再失华人大将:预训练负责人已离职,马斯克又留不住人了
xAI再失华人大将:预训练负责人已离职,马斯克又留不住人了刚刚,xAI再失一名华人大将。就在今天,预训练负责人庄钧堂官宣了自己的离职消息。此前,庄钧堂已经在xAI工作了两年。这期间,他主导了从Grok 2到Grok 5的全系列预训练,同时负责Grok在X和Tesla上的语音模型及xAI企业API模型。
来自主题: AI资讯
8406 点击 2026-05-09 13:17
 搜索
搜索
刚刚,xAI再失一名华人大将。就在今天,预训练负责人庄钧堂官宣了自己的离职消息。此前,庄钧堂已经在xAI工作了两年。这期间,他主导了从Grok 2到Grok 5的全系列预训练,同时负责Grok在X和Tesla上的语音模型及xAI企业API模型。
MiniMax M2 系列受到了开发者社区的广泛关注,不少用户在深度使用中发现了一些个例问题,其中“模型无法说出马嘉祺”这个问题引发了较多讨论。 我们也注意到,社区中有不少开发者对这个现象进行了高质量
Jim Fan 在红杉资本 AI Ascent 最新观点,信息量极大,机器人物理AI很快就会迎来突破,答案就在视频模型,路径就是LLM的突破路径,Jim Fan把机器人的未来路线图比作文明游戏里的科技树,还剩三个成就要解锁,2040年就是终局

这场Musk v. 奥特曼审判,正在把OpenAI最不想公开的内部裂痕一次性摊开:前CTO Mira Murati作证称奥特曼曾在模型安全审批上误导她,还长期制造高管间的「混乱与不信任」。核心看点不只是八卦,而是OpenAI到底是怎样从「非营利理想」一步步走到今天的权力与利益之争,这会直接影响外界对OpenAI、治理、AI安全和公司合法性的判断。
就在今天,OpenAI 的 Codex 团队开发者体验工程师 Jason Liu 发推公布了一个「小而有爱」的项目:OpenAI 官方推出了命令行界面工具 openai-cli,开发者只需在终端敲下一行命令,即可直接与 OpenAI 的最新模型深度交互,打破了过去SDK的限制。
就在昨天,全球AI四极格局一夜崩塌!xAI解散、22万张GPU归入Anthropic,下一代模型三大方向也曝光了。今天,Anthropic研究院成立,AI 2027的许多预言已经成真——AI终局战,已经刺刀见红。

其中,大家「讨伐」声量最大的莫过于 ChatGPT 了,从 AI 味儿熏人的经典破折号、「不是 A,而是 B」句式,以及前段时间间歇性出现的「哥布林」,再到如今充满青春伤痛文学矫情劲儿的「我会稳稳接住你」,用户快要被折磨疯了:我们关系可以亲密,但没必要这么亲密。

刚刚,Anthropic 发布论文《Natural Language Autoencoders Produce Unsupervised Explanations of LLM Activations》,试图用一套 自然语言自动编码器(Natural Language Autoencoders,下文简称 NLA), 撬开这个黑箱。

据消息人士透露,阶跃星辰将完成近25亿美元(约合人民币170亿元)融资,并已拆除红筹架构,加速筹备赴港IPO,或将成为智谱、MiniMax之外又一家赴港上市的国产大模型公司。
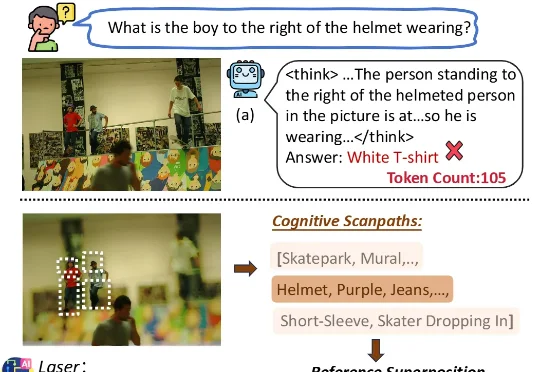
为了解决这一痛点,由 MBZUAI、复旦大学、中国人民大学高瓴人工智能学院以及哈佛大学联合组成的研究团队,提出了一种名为 Laser 的全新隐式视觉推理范式。该研究从认知心理学中汲取灵感,引入了 “Forest-before-Trees” 的认知机制,通过动态窗口对齐学习(DWAL),首次实现了在隐空间中维持视觉特征的 “概率叠加” 状态。