# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
单目 3D 语义场景补全 (Semantic Scene Completion, SSC) 是具身智能与自动驾驶领域的一项核心技术,其目标是仅通过单幅图像预测出场景的密集几何结构与语义标签。
长期以来,该领域受困于传统的密集网格(Grid-based)表征。虽然近期涌现出的 “对象中心” 范式(如 GaussianFormer)利用 3D 高斯基元(Gaussian Primitives)显著提升了效率,但这一路径仍面临两大瓶颈:
1. 基元初始化的盲目性:现有的方法往往通过在 3D 空间内随机分布数万个高斯基元来覆盖场景。实验发现,这种随机初始化的有效利用率极低(仅约 3.9%),造成了巨大的计算冗余。
2. 异常基元引发的 “漂浮物” 伪影:在处理稀疏基元聚合时,现有的方法往往无法有效处理孤立的离群点,导致在空旷区域生成错误的语义碎块,即所谓的 "Floaters" 现象。
针对这些挑战,我们提出了SplatSSC。该框架通过创新的深度引导策略与解耦聚合机制,实现了性能与效率的跨越式提升。
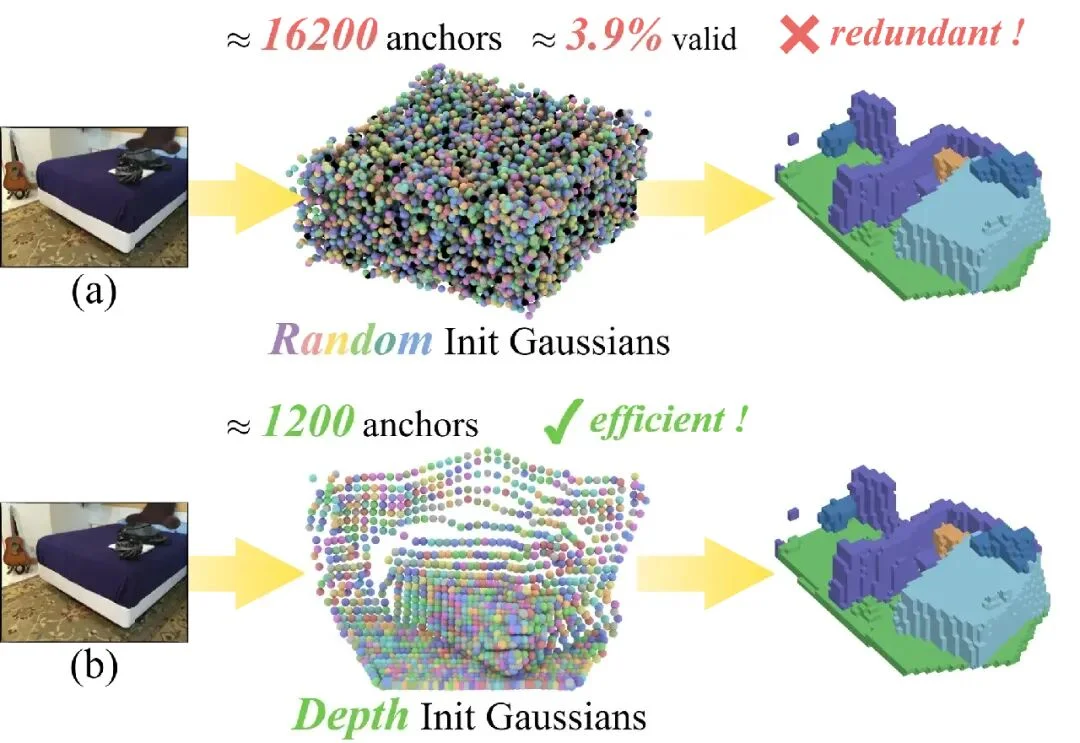
图 1:SplatSSC 与主流框架的初始化策略对比。(a) 现有的 Transformer 框架通常依赖大规模随机分布的高斯基元,这不可避免地引入了空间冗余,导致模型容量的浪费。(b) 相比之下,SplatSSC 利用几何先验进行引导,仅需一组精简且目标明确的高斯基元,即可实现高效的空间覆盖。
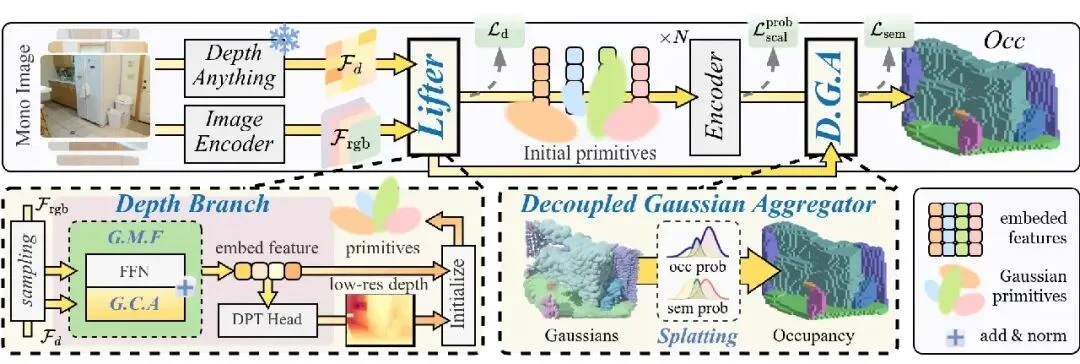
图 2:SplatSSC 架构总览。我们采用并行分支策略:可学习的图像编码器负责多尺度语义提取,而预训练的 Depth-Anything 模型则提供稳定的深度特征。通过组内多尺度融合(GMF)模块,这两类特征在经过采样后被映射到 3D 空间,完成高斯基元的几何初始化,并交由多级编码器进行精炼,最后通过 DGA 模块渲染为语义体素。
2.1 深度引导基元初始化:GMF 模块
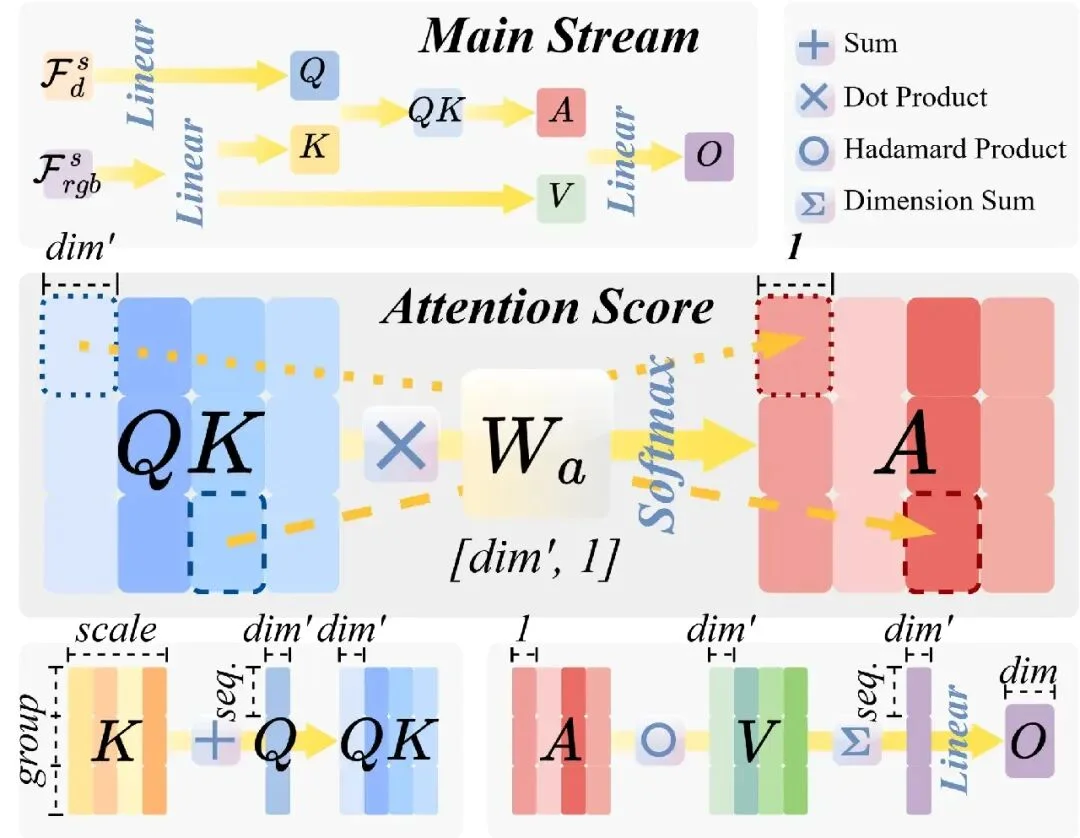
SplatSSC 的核心思想是摒弃随机初始化,转而利用几何先验进行精准引导。我们设计了组内多尺度融合模块(Group-wise Multi-scale Fusion, GMF):

2.2 解耦高斯聚合器 (DGA):向 “漂浮物” 宣战
SplatSSC 引入了解耦高斯聚合器(Decoupled Gaussian Aggregator, DGA),从根本上重新设计了高斯到体素(Gaussian-to-voxel)的喷溅过程。
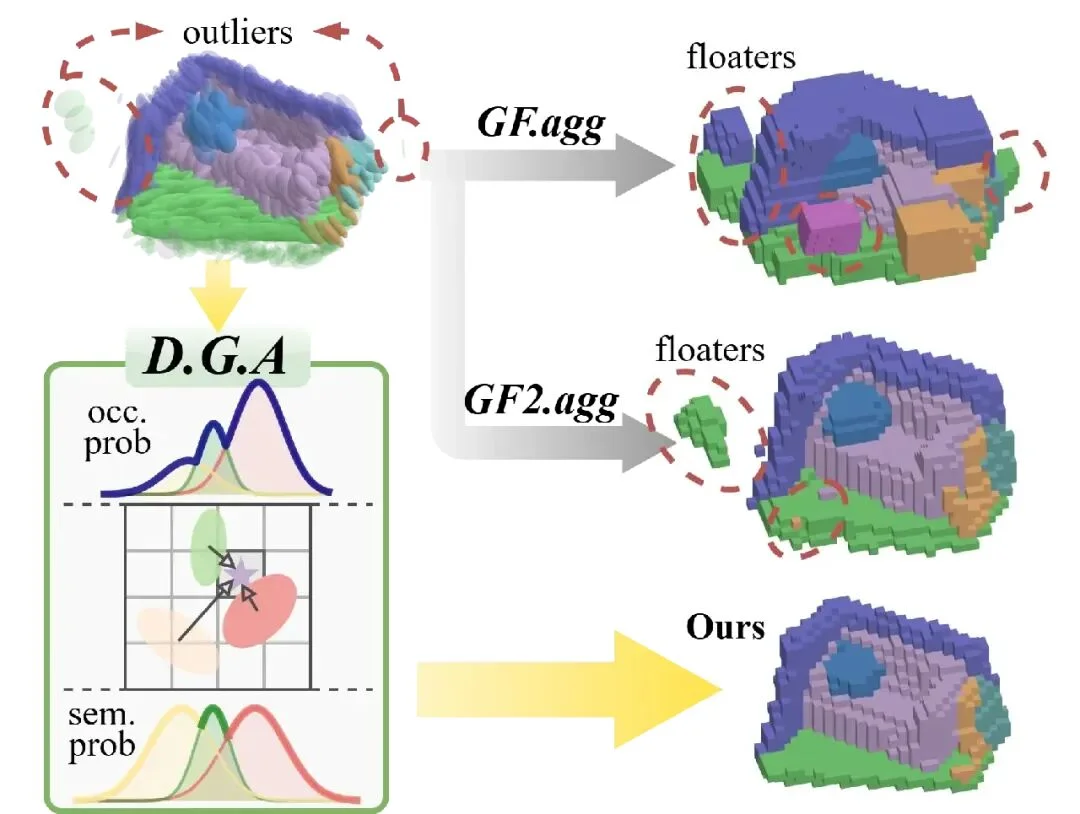
图 4:DGA 鲁棒性演示。传统的聚合方法(如 GF.agg 和 GF2.agg)在面对离群基元时,容易在空旷空间生成错误的 “漂浮物”。DGA 通过解耦占据概率与语义贡献,利用极低的占据概率直接抑制离群点的错误语义映射,从而确保了场景边界的纯净。
我们在室内场景补全的主流基准数据集 Occ-ScanNet 上验证了 SplatSSC 的性能。
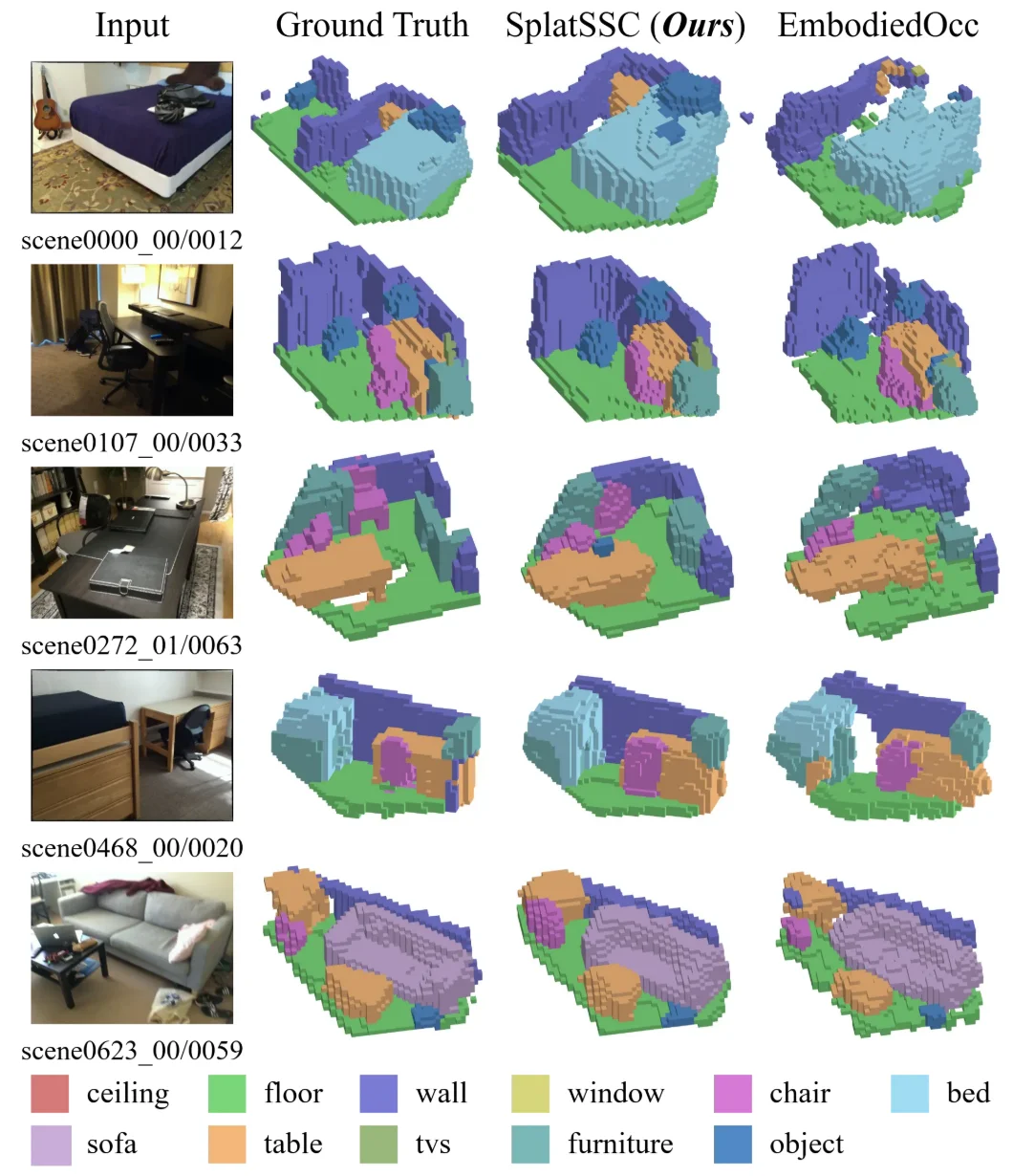
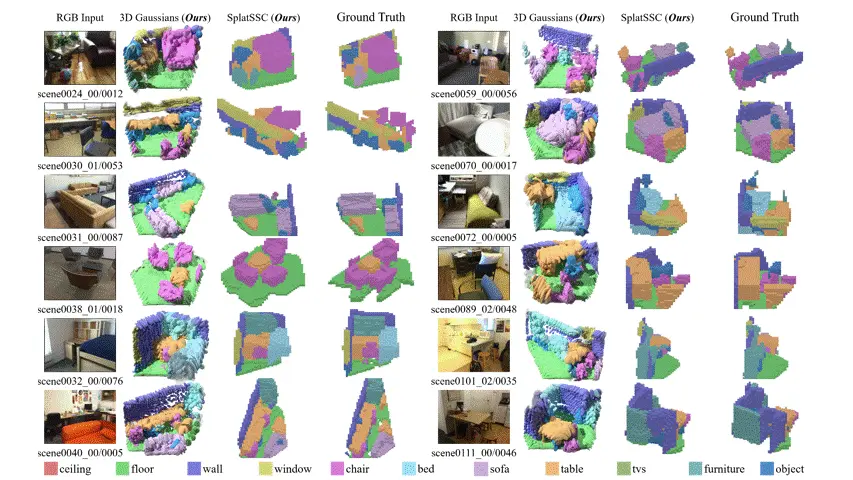
图 5:在 Occ-ScanNet-mini 上的定性实验对比。与其他 baseline 相比,SplatSSC 在场景补全的完整度以及目标物体的召回率上具有明显优势。
3.1 主实验
SplatSSC 在 IoU 指标上达到了62.83%,mIoU 达到51.83%。
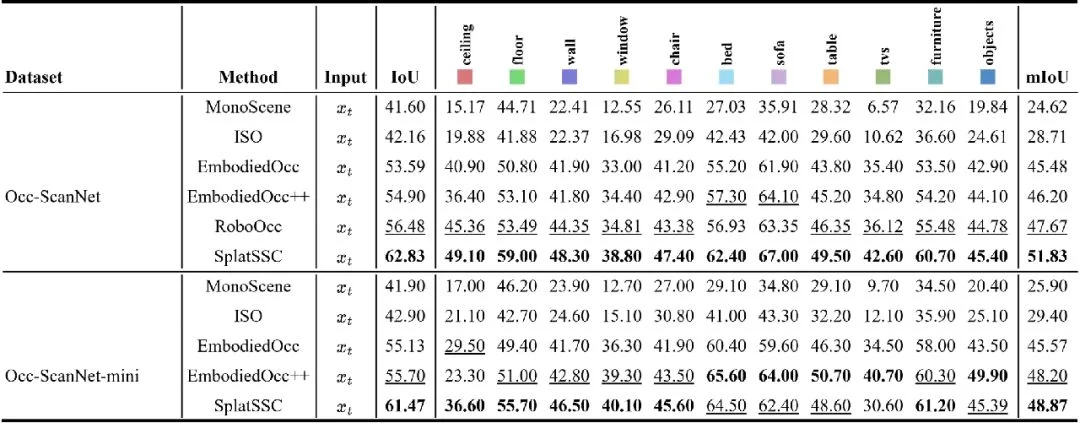
表 1:Occ-ScanNet 数据集上的局部预测性能对比。实验结果显示,SplatSSC 在 IoU 与 mIoU 各项指标上均刷新了记录。表中加粗部分代表最优结果,下划线代表次优结果。
3.2 消融实验
高斯基元参数的消融分析:这组实验揭示了一个关键结论:基元堆砌并不等同于精度提升。
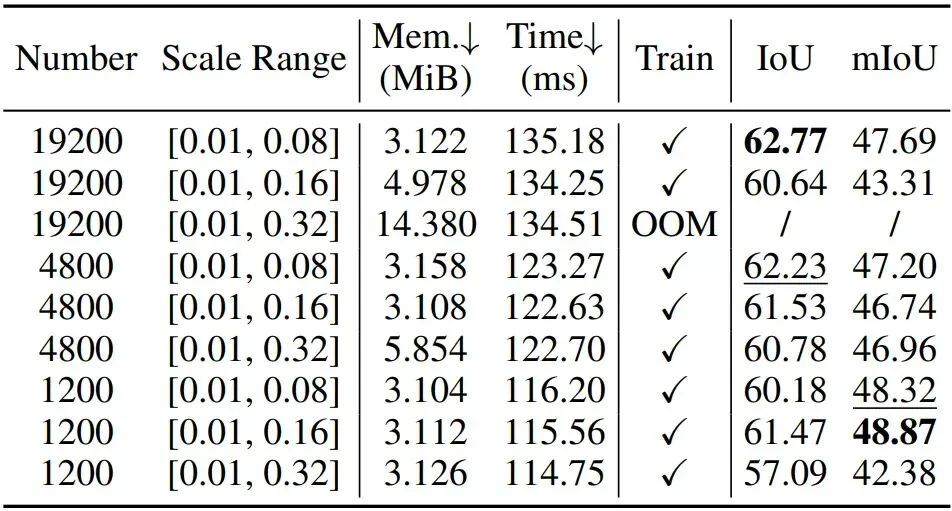
表 2:高斯基元参数消融实验。显存占用与耗时均在单张 RTX 3090 GPU 上测得。
模块贡献与架构拆解:这组实验量化了深度分支(GMF)与解耦聚合器(DGA)的协同效应,证明它们是解决行业痛点的 "组合拳":
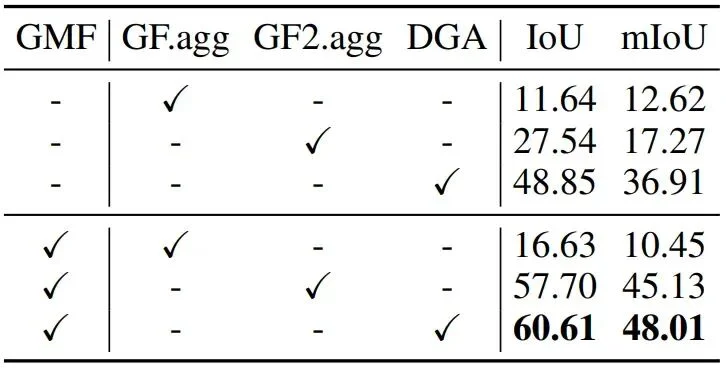
表 3:SplatSSC 核心组件消融实验。
SplatSSC 展示了稀疏表征的巨大威力:
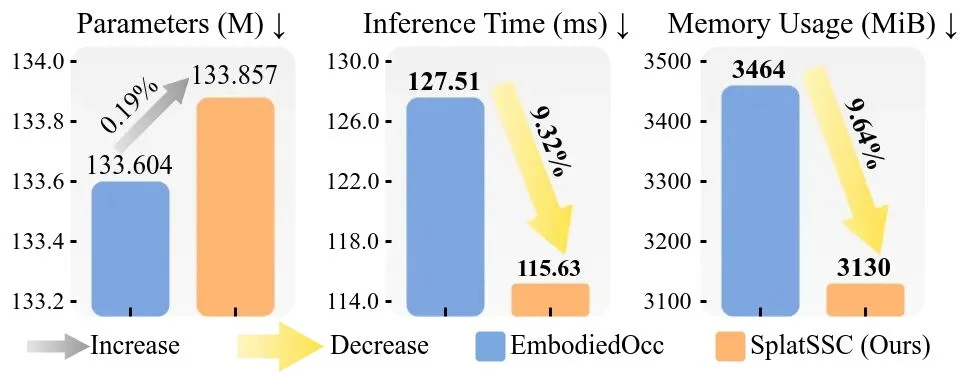
图 6:效率指标对比。实验结果表明,通过引入几何引导的稀疏表征,SplatSSC 仅付出极小的参数成本,即可显著降低推理延迟与显存占用。
SplatSSC 的成功证明了:在 3D 场景表征中,基元的 “质量” 远比 “数量” 更重要。通过几何引导的精准初始化与解耦聚合,我们可以在更低的计算资源下实现更高质量的场景重构。
目前 SplatSSC 在单帧感知上表现优异,未来我们将致力于将其扩展到大规模户外动态场景以及长程具身感知任务中。我们相信,这种基于高斯基元的高效表征将成为构建持久性、交互式世界模型的关键一步。
文章来自于“机器之心”,作者 “机器之心”。


