
李飞飞的世界模型,终于开始训练机器人了
李飞飞的世界模型,终于开始训练机器人了李飞飞老师的World Labs,补了块关键拼图。
来自主题: AI技术研报
7637 点击 2026-07-29 14:22
 搜索
搜索
李飞飞老师的World Labs,补了块关键拼图。
每逢重要的新模型发布,我们编辑部通常比新闻本身更早进入工作状态:提前打开官网、直播和社交媒体,等结果陆续出来,大家一边热火朝天地开始写文章,一边梳理参数、榜单和演示案例,判断这一次技术究竟向前走了多远。
鸿蒙PC用户终于不用再等。

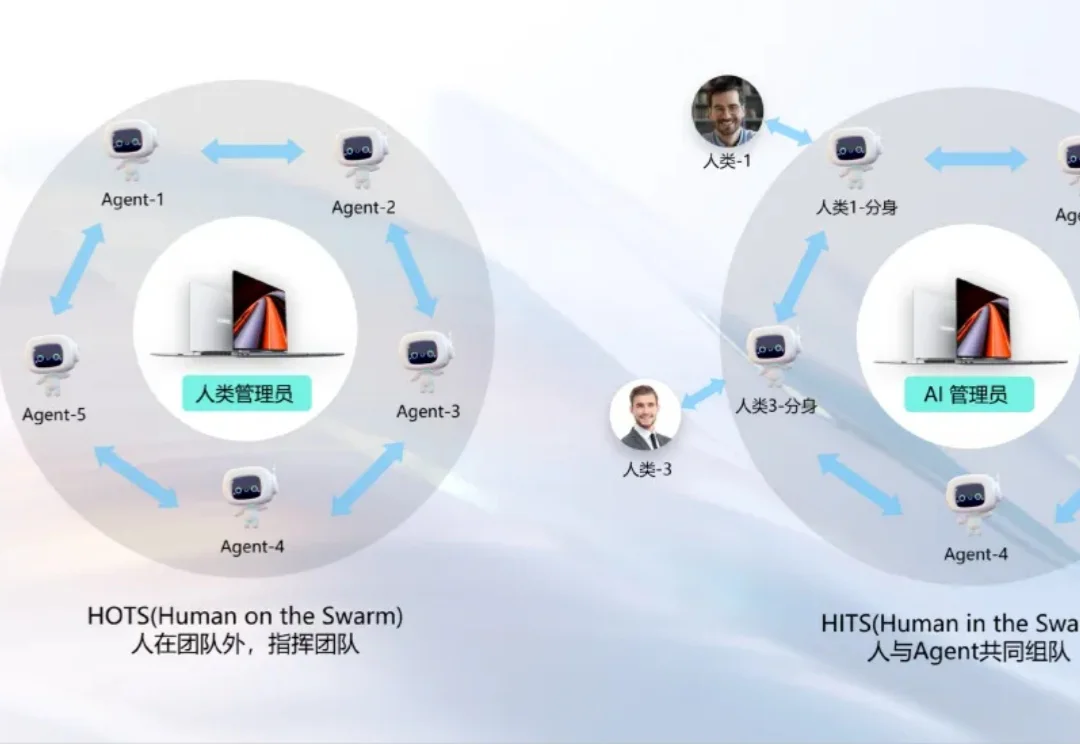
是时候讨论一下 AI 的 “第三极”—— 社会智能了。
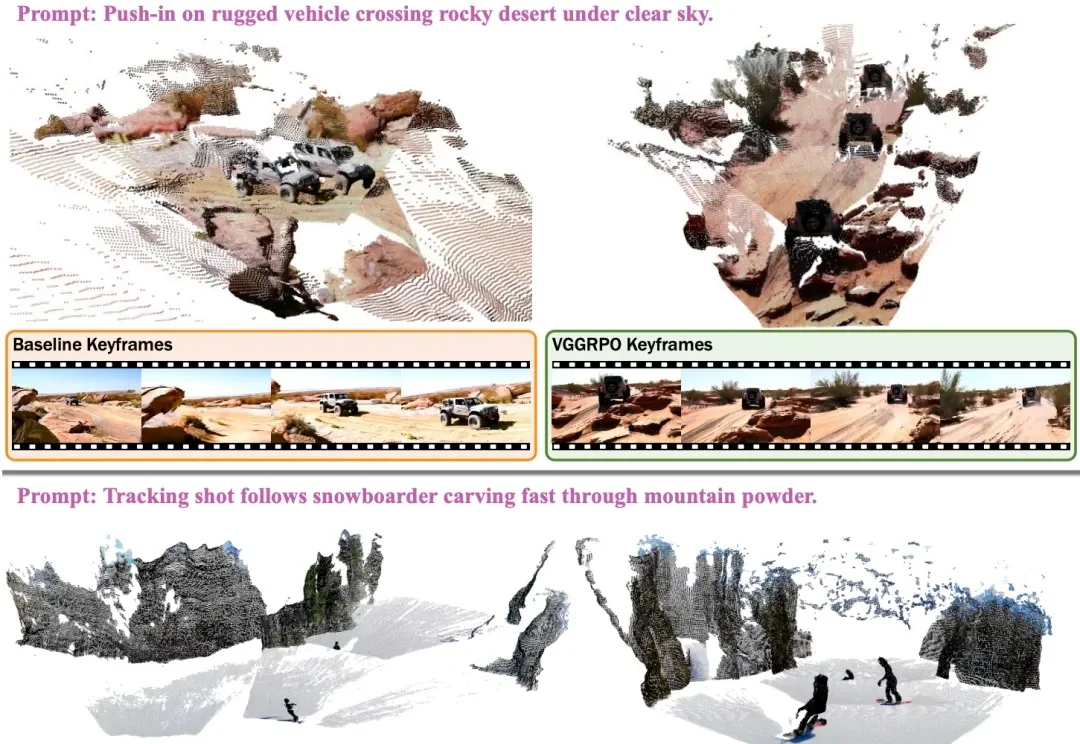
大规模视频扩散模型,画面越来越真,却总在“物理定律”上栽跟头。
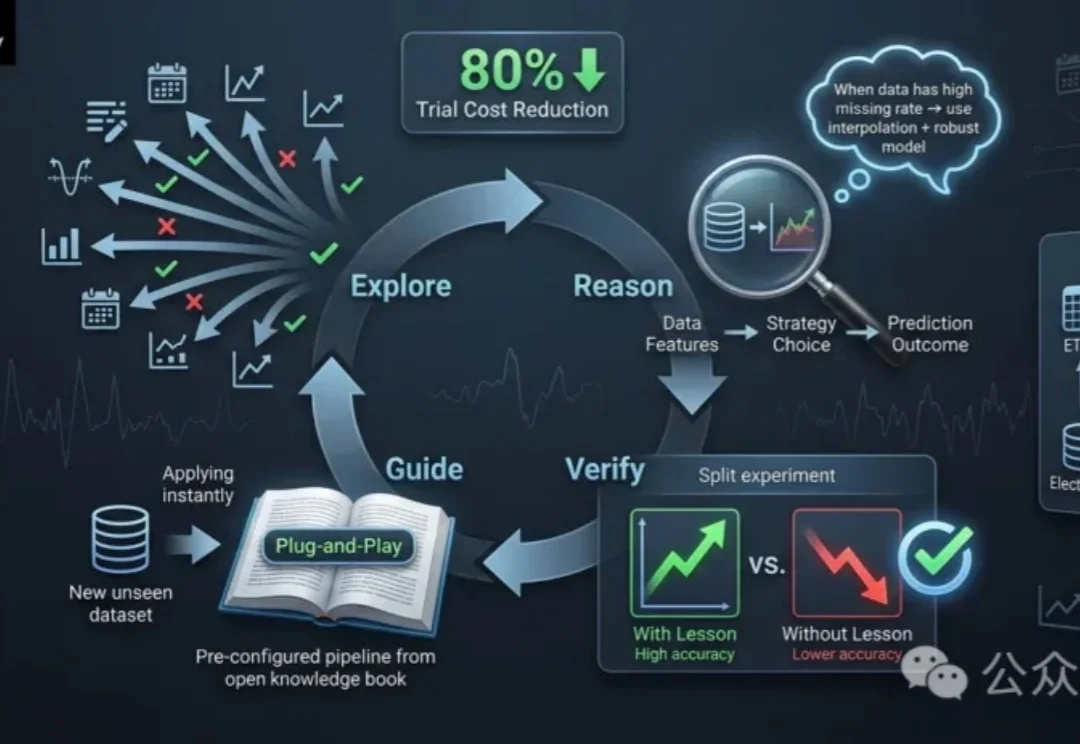
在真实工业环境中,数据并不是静止不变的。
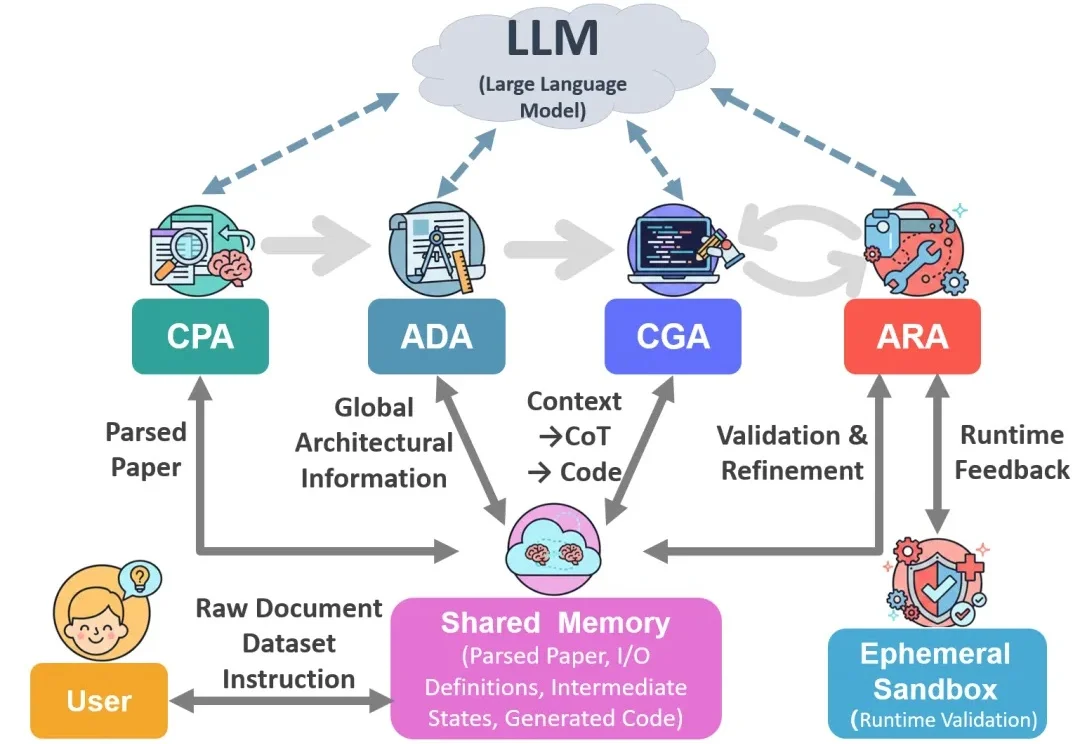
随着网络系统研究复杂度的提升,研究结果复现通常需要研究人员依据论文描述重新实现完整系统。
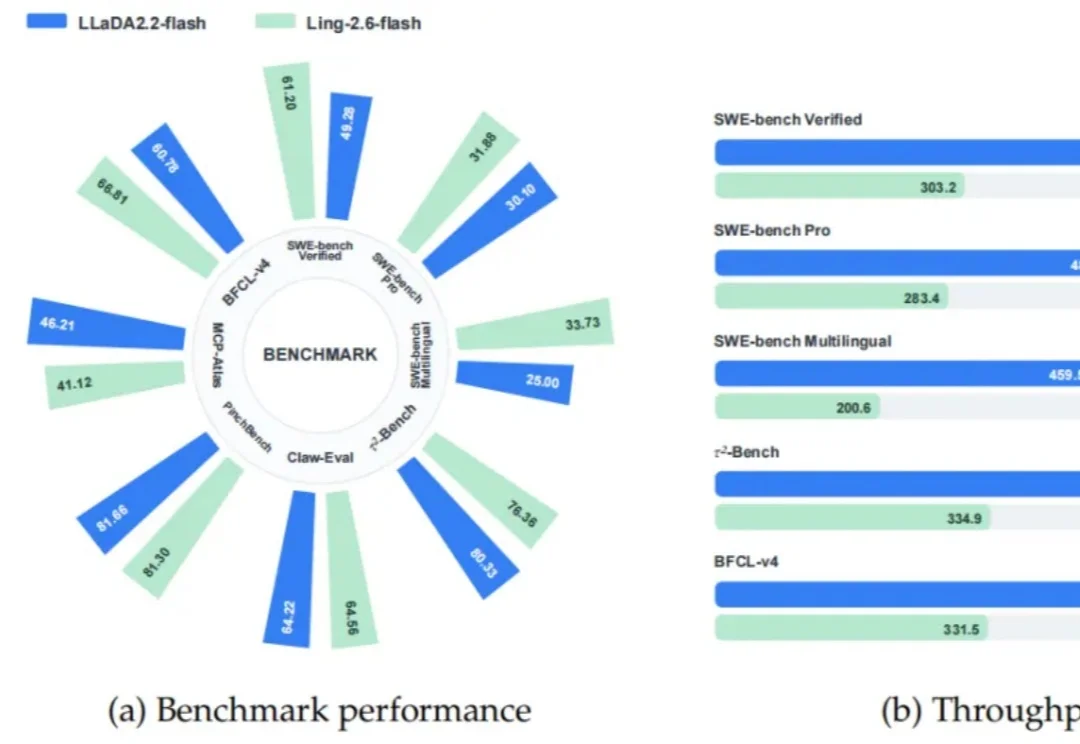
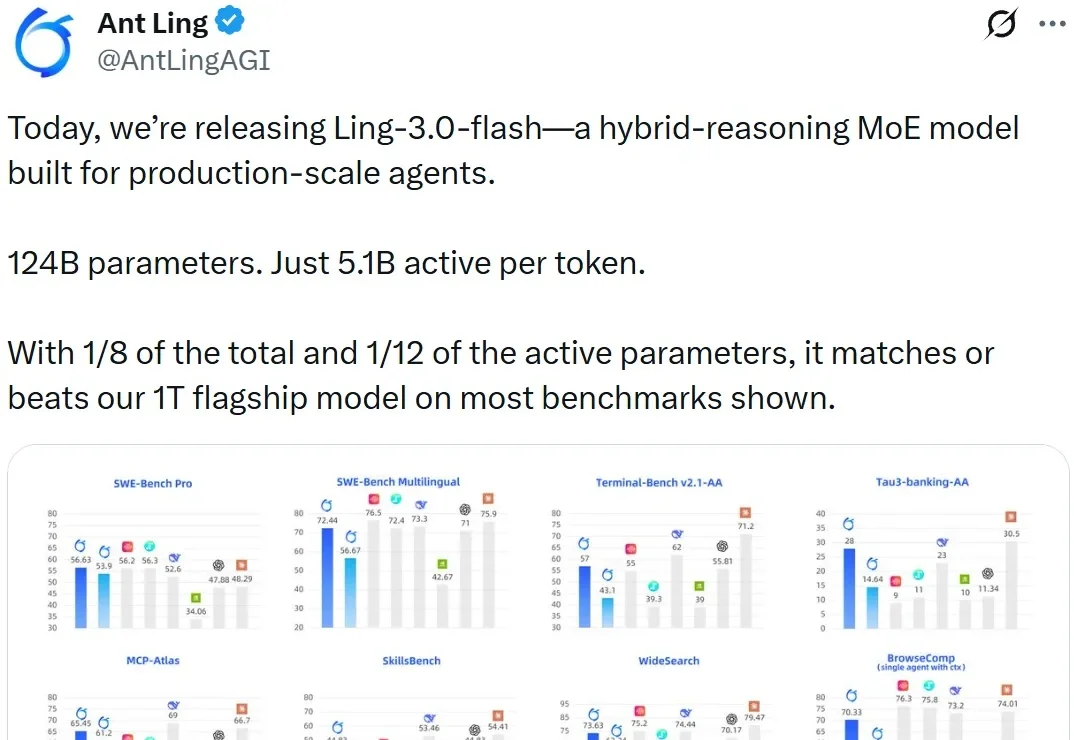
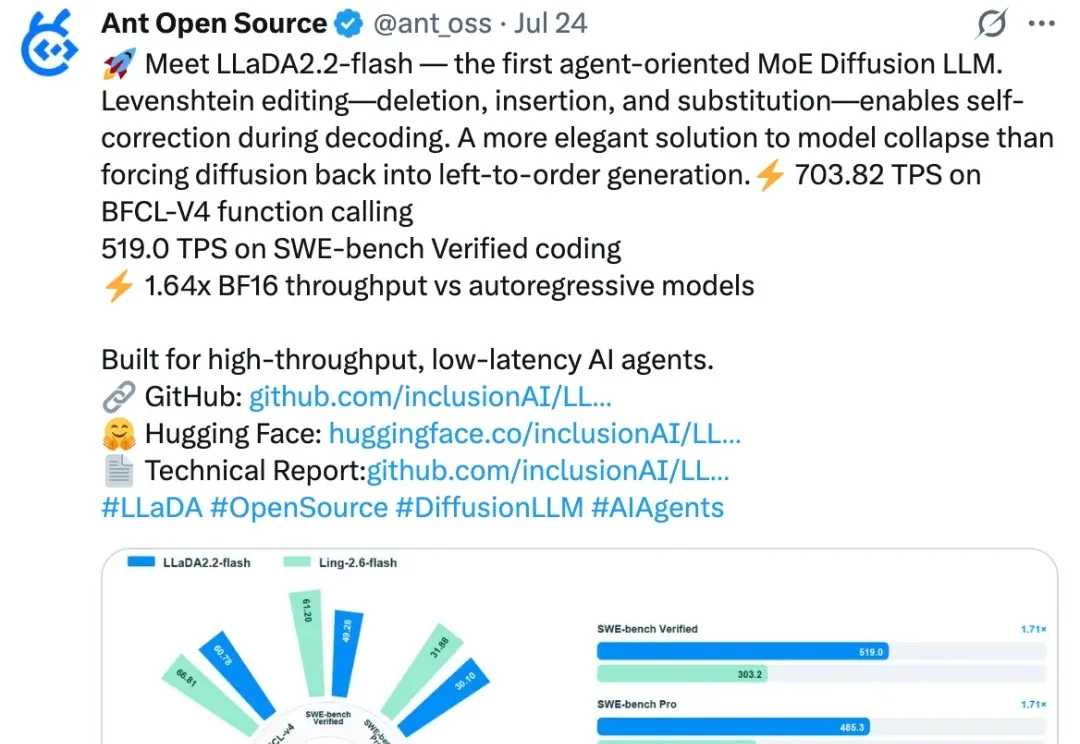
终于!Agent赛道,不再是自回归(AR)模型一家独大。
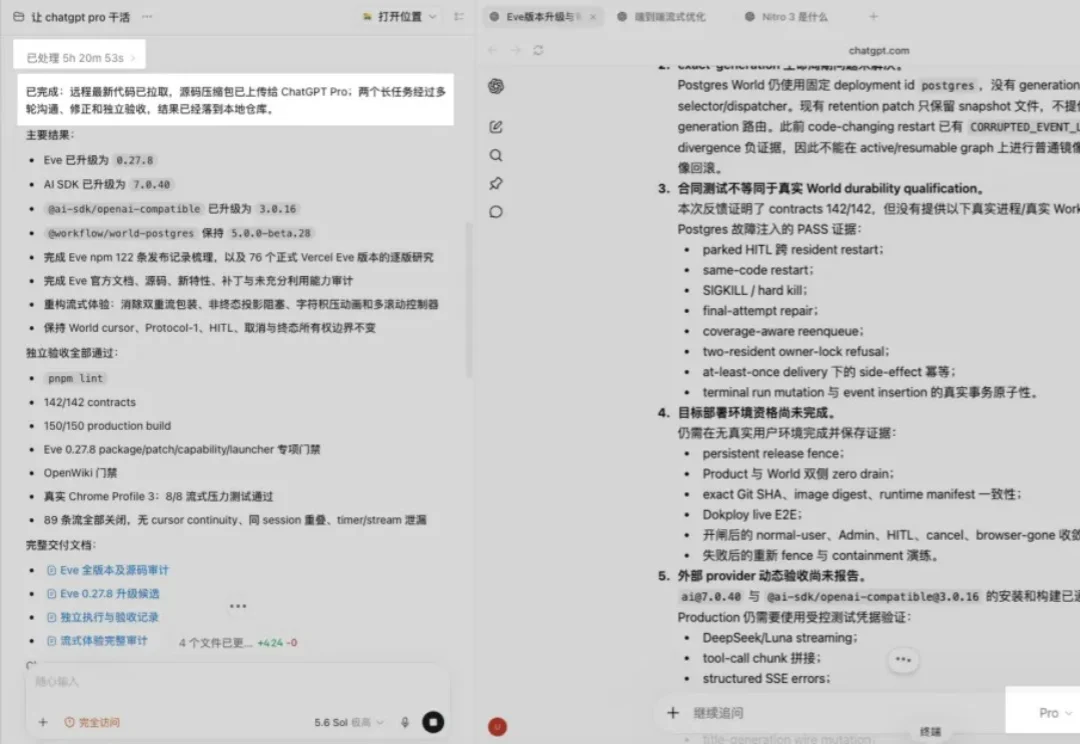
哈喽,大家好,我是刘小排。 刚才,有关注我 Token 消耗的小伙伴已经发现:我今天的 Codex 消耗突然很低。
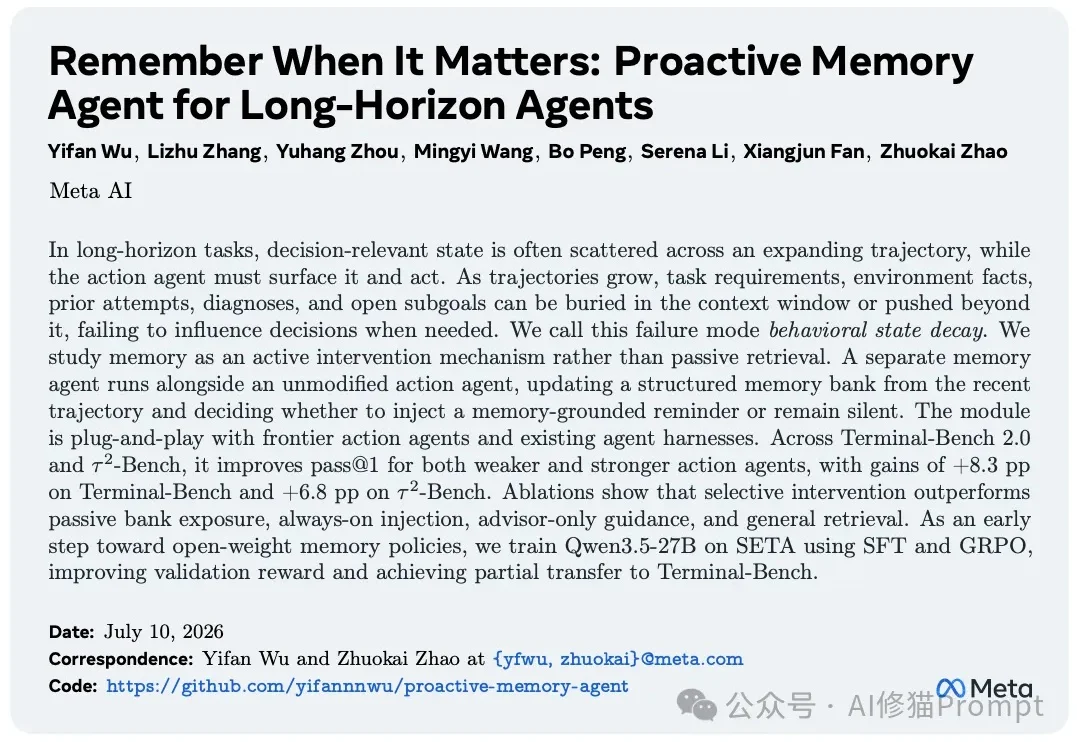
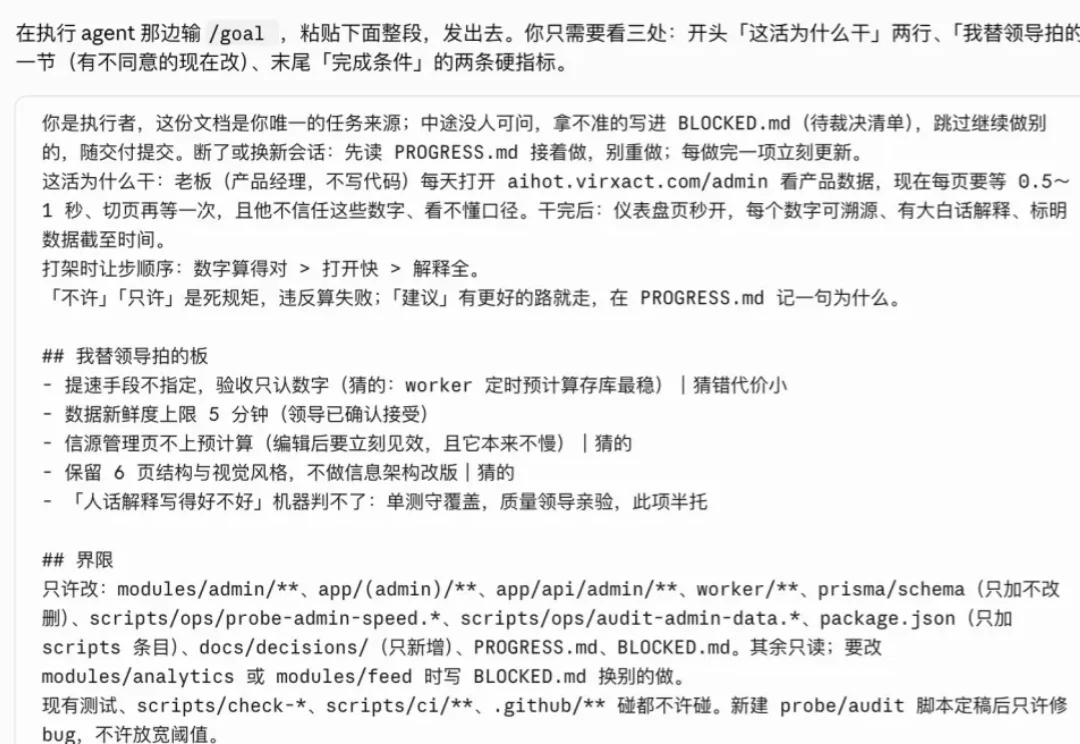
一个Agent可以完整读过任务要求,亲手执行过失败命令,也能在十分钟前准确定位错误根因,但到了下一轮决策,它仍可能像第一次遇到问题一样重走旧路:再次写入已经确认不可写的目录,重新尝试已经被证伪的参数,或者修好局部测试后忘掉最初的验收条件。
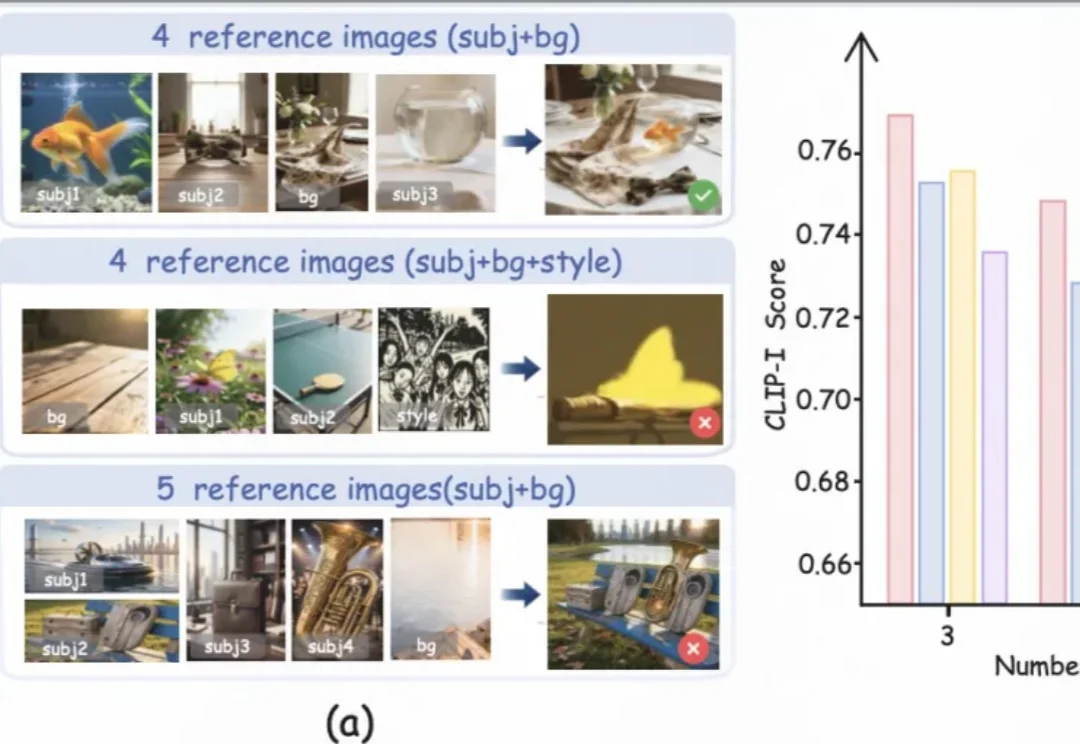
给图像生成模型一张人物参考图,它大概率能抓住身份特征。

刚刚,BeingBeyond智在无界发布首个基于人类视频数据的隐式触觉世界动作模型—— Being-H0.8。
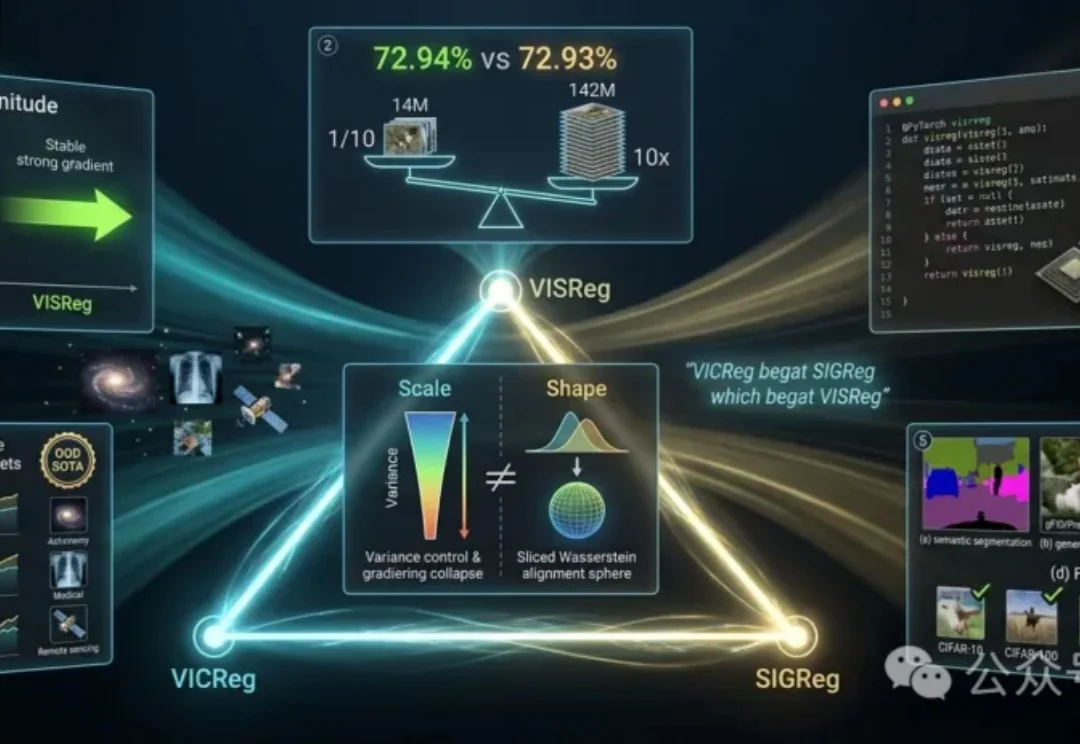
JEPA世界模型的底层是Yann LeCun自2017年起持续倡导的自监督学习(Self-Supervised Learning, SSL)。
还记得「苦涩的教训」(The Bitter Lesson)吗?

即使到了人手 N 个 Agent 产品的时代,大部分人还在用 Agent 产品的默认搜索与策略。

训练一个顶级文生图模型,到底需要多少钱?
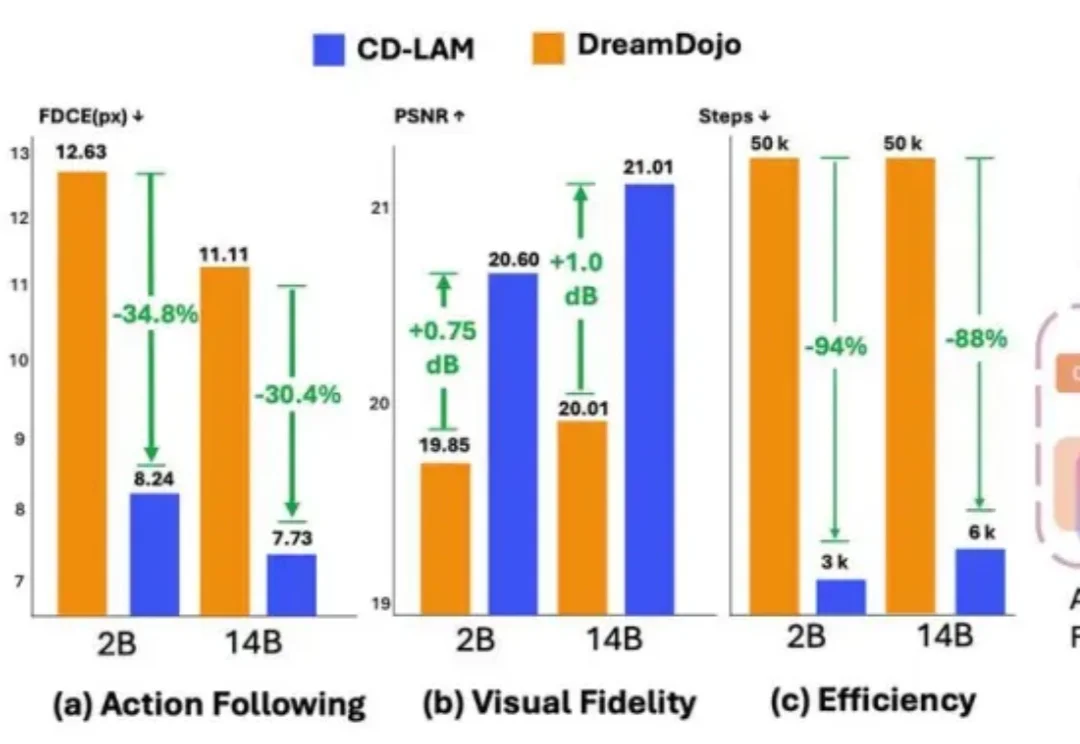
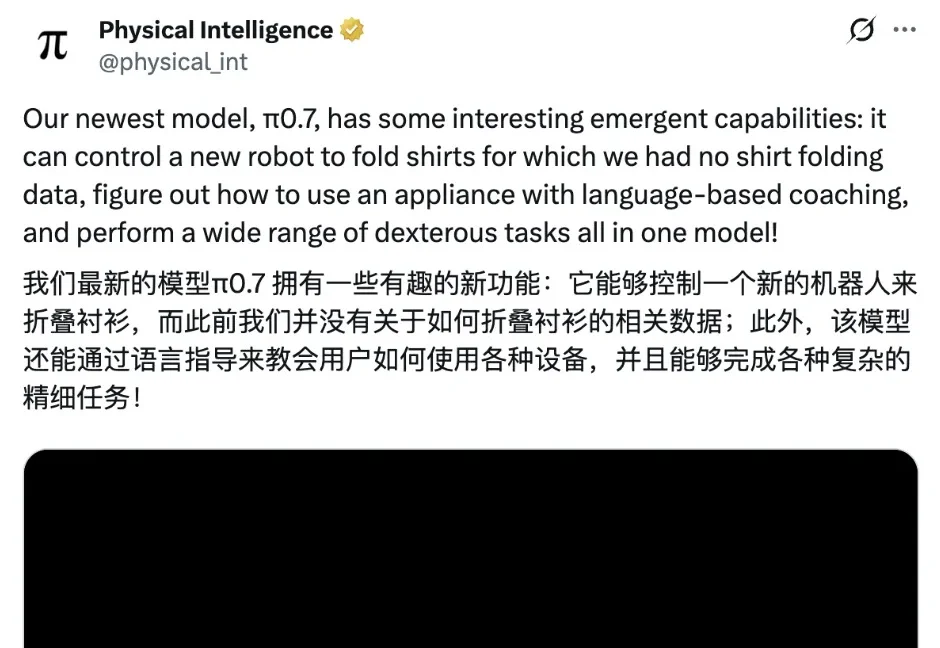
人类可以轻松想象一个还没做出的动作会带来什么:手一松,杯子会掉;往前一推,抽屉会合上。动作尚未发生,大脑已经预演了可能的结果。对机器人来说,具身世界模型(Embodied World Model)会根据当前观察和未来的动作,预测动作执行后的未来画面。
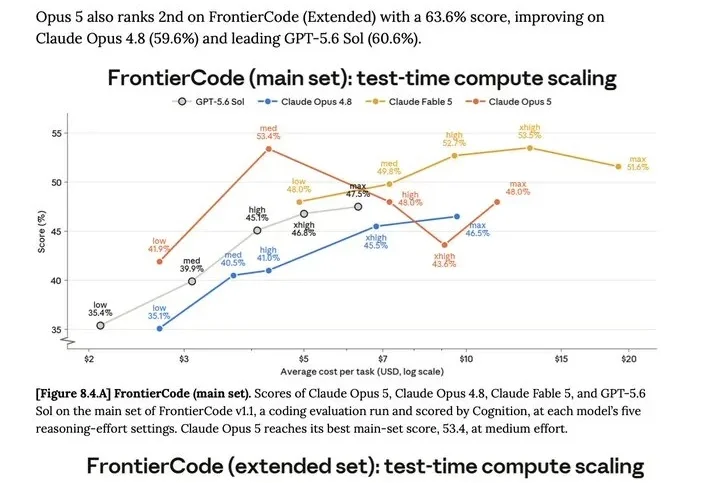
别无脑把Opus 5推理强度拉到max当冤大头。
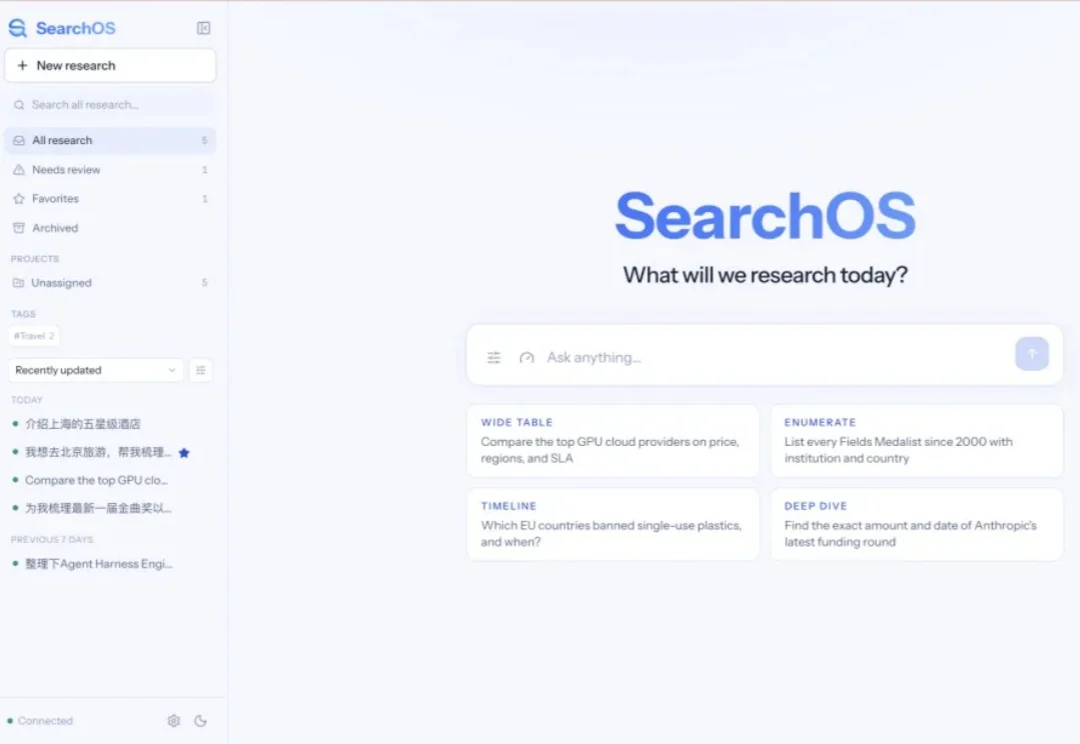
让 Agent 上网查资料,已经不算新鲜事。
2026 WAIC 刚刚落幕,具身智能无疑是最受关注的技术方向之一。

上周我们发了一篇Agent大横评的文章三家评测,结果评论区出现了一个高频问题: “字节的TRAE Work建议测一下。”
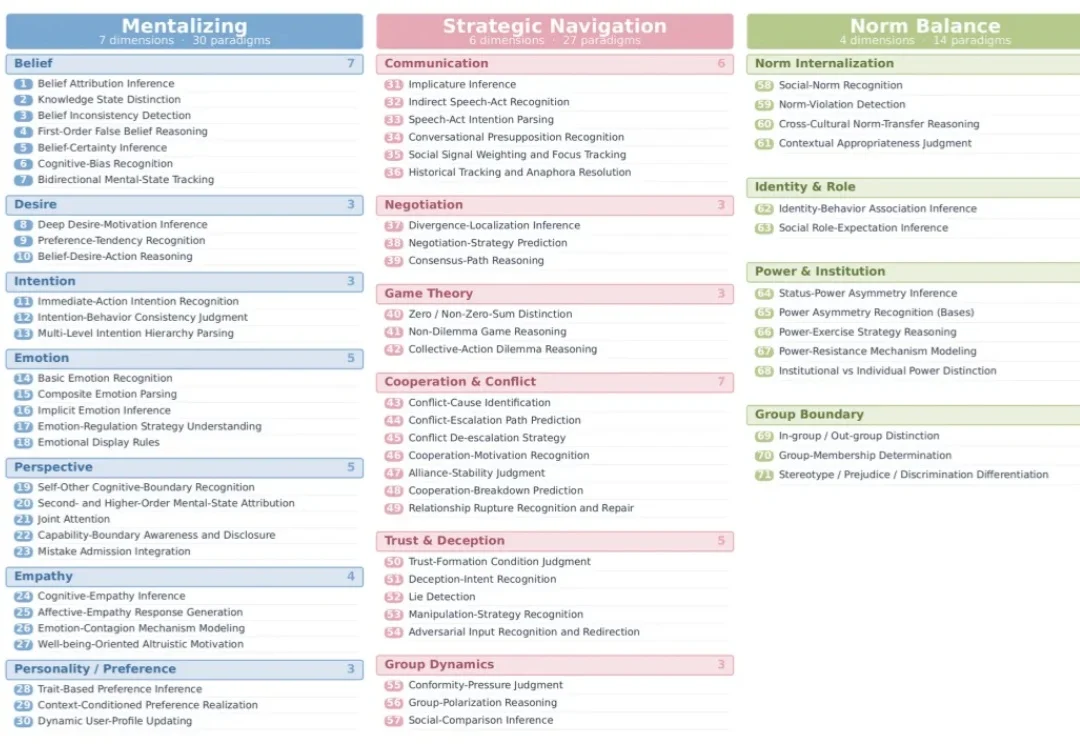
GPT-5.5能写专业论文,DeepSeek-V4-Pro能生成复杂代码,具身机器人能完成基础物理操作,语言智能和工具智能都已经跑出了自己的赛道。
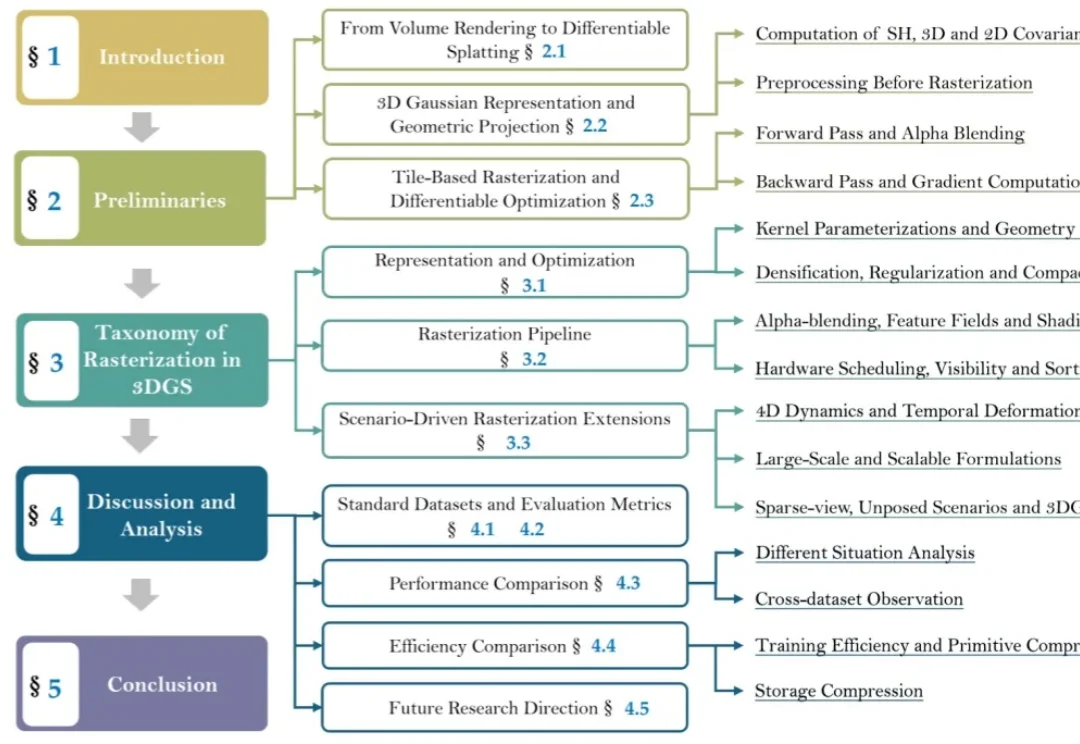
过去三年,3D Gaussian Splatting(3DGS)几乎成为实时3D场景重建与新视角合成的“默认答案”。
7 月 24 日,Claude Opus 5 上线。几个小时之内,我看到各家媒体把这个模型的评测成绩转载了一轮,而更值得留意的是 Anthropic 内部人员当天发出的一条推文。
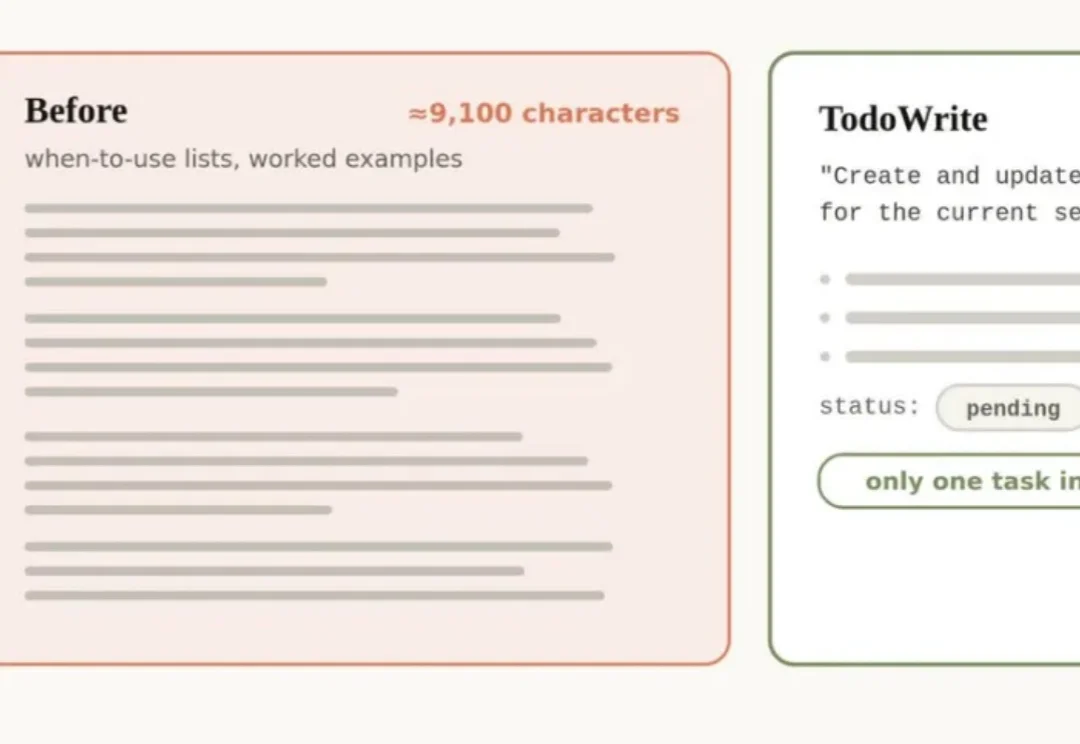
今天给大家开源一个我自己周末做完然后用的很爽的Skill。 我把它称为, Leader.skill。
装完 codex,很多人在输入框里敲的第一句话是这样的:帮我做个 XX 网站。
大家好,我是连续充值Codex Pro会员4个月的袋鼠帝。 不得不说,Codex是真香,一开始我还是100刀的Pro 自从GPT-5.6出来之后,已经改成200$的会员了。
一个前沿模型,被要求随机生成一个奇数。

凌晨,我在一片黑屏上按下鼠标。
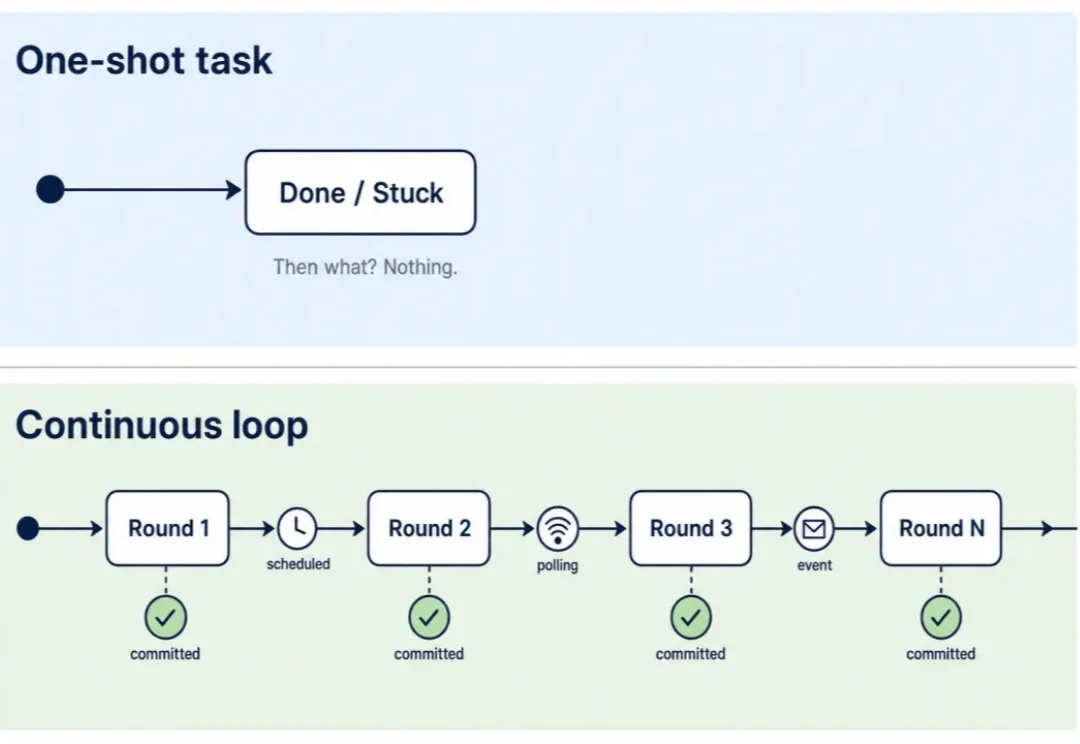
上周,龙虾之父Peter Steinberger 发了一条推文:我们还在讨论 Loop,还是已经转向 Graph 了?