全球84%的人从未碰过AI,你以为自己晚了?其实你早得离谱!
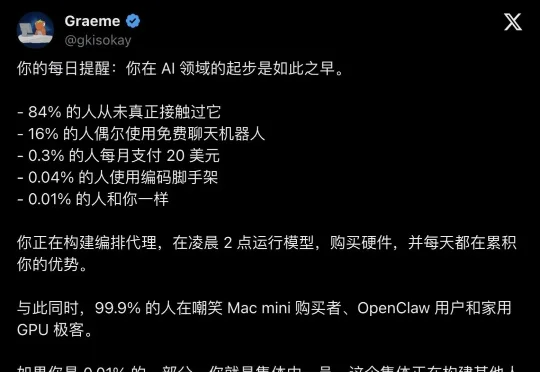
全球84%的人从未碰过AI,你以为自己晚了?其实你早得离谱!一张图在X上炸了:全球84%的人从未真正用过AI,16%偶尔玩玩免费聊天机器人,0.3%愿意每月付20美元,0.04%用AI写代码,0.01%是凌晨跑模型、买硬件的重度玩家。这不是鸡汤,微软官方数据托底。你天天刷AI资讯,以为全世界都在卷——其实你身处的那个圈子,是全球最顶端的0.01%。
来自主题: AI技术研报
8168 点击 2026-04-19 21:47