打破代码大模型训练瓶颈:微软&剑桥&普林推出MicroCoder,算法、数据、框架、训练经验全面升级
打破代码大模型训练瓶颈:微软&剑桥&普林推出MicroCoder,算法、数据、框架、训练经验全面升级新一代代码模型的训练动态已与旧模型截然不同,主流强化学习方法和数据集在其上几乎“失效”。
来自主题: AI技术研报
10504 点击 2026-03-30 09:29
 搜索
搜索
新一代代码模型的训练动态已与旧模型截然不同,主流强化学习方法和数据集在其上几乎“失效”。
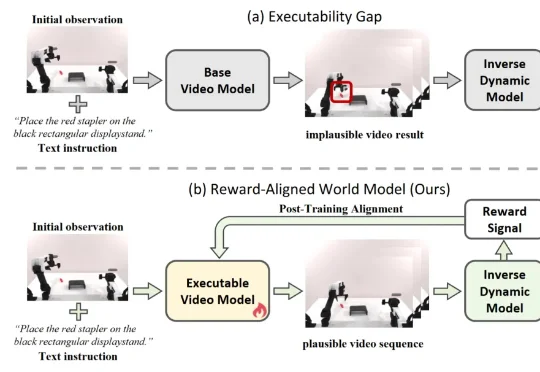
近期,利用视频生成模型为机器人构建 “世界模型”,已成为具身智能领域的热门技术路线。给定当前观测和自然语言指令,这类模型能够先 “想象” 出未来的视觉轨迹,再由逆动力学模型(IDM)将生成画面解码为机器人动作,从而形成 “先预测、后执行” 的解耦式规划范式。由于兼具较强的可解释性与开放场景泛化潜力,这一路线正在受到学术界和工业界的广泛关注。

最近,Kickstarter 上一个叫 ClawStage 的小方块,把不少人的“好奇心”给勾起来了。刚刚上线,就已经快速冲破20万美元,目前仍在飞速增长! 它最吸引我的地方,在于“让云端的 AI 有了躯体”。这背后,藏着一套叫 OpenClaw 的自托管 AI 框架,还有我们熟悉的 Raspberry Pi 5 硬件支撑。
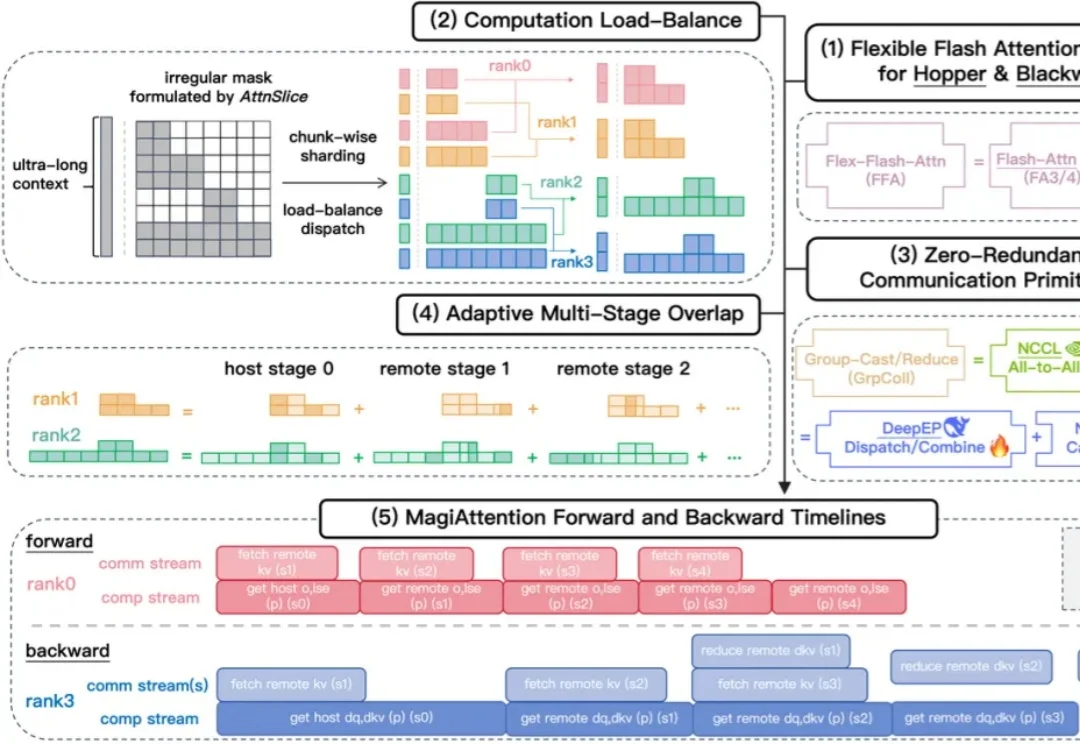
2025 年 4 月,Sand.ai 开源了 MagiAttention v1.0.0,定义了下一代分布式 Attention 的全新设计和系统框架。历经一年的深耕,今天 Sand.ai 正式发布:MagiAttention v1.1.0,以更成熟的原生算子组件,重新定义 Hopper 与 Blackwell 两代架构分布式 Attention 的性能上限。
昨天在群里闲逛,发现观猹上新了一个龙虾测评专区。

原来字节也有龙虾——Deer-Flow2超级智能体管理框架。开源发布后迅速登上了GitHub Trending榜首,已经收获了35.3k Star。Deer-Flow2采用模块化多智能体架构,这些智能体通过LangGraph实现协同合作。

AI 驱动的自动化科研正从概念走向真实系统。近期受到广泛关注的 FARS,以及 Karpathy 开源的 autoresearch,都在不同程度上展示了 AI Scientist 自动进行 AI 领域研究的可行性。
2026 年,OpenClaw 引爆 AI 圈,但 B 站 UP 主开发的硬核 Agent 框架 AstrBot 早在 2023 年 1 月就发布了第一个版本。B 站是如何凭借独特的社区反馈机制,成为孕育 AI 技术落地的「第一现场」?
在此背景下,浙江大学研究团队提出了 EasySteer——一个基于 vLLM 构建的高性能、可扩展 LLM Steering 统一框架。该框架通过与 vLLM 推理引擎的深度集成,相比现有 Steering 框架实现了 10.8-22.3 倍的推理加速,同时提供更细粒度的干预控制,并为八大应用场景提供了预计算 Steering 向量与完整复现示例,方便研究者快速上手和对照复现。
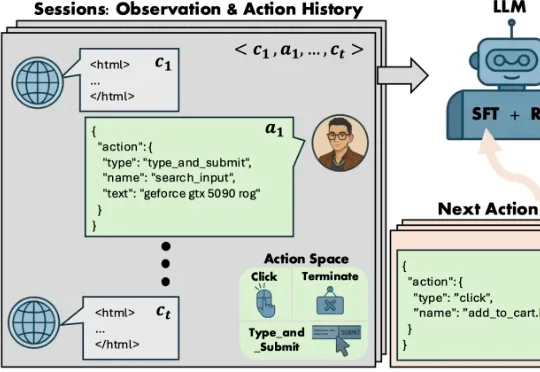
传统的 AI 购物助手更像是一个任务完成机器:接到指令,搜索,下单。他们或许能跑通流程,却完全无法理解用户为何在最后一刻因为一条关于 “夹耳朵” 的差评而放弃支付。简而言之,传统的电商 Agent 只是任务导向的(task-oriented),而不是模拟导向的(simulation-oriented)。为此,来自亚马逊(Amazon)的研究团队提出了名为 Shop-R1 的训练框架 。