
清华系团队给大模型织了一张“智能算力电网”
清华系团队给大模型织了一张“智能算力电网”所有人都在比谁的模型参数更大,但真正决定AI能不能落地的,其实是另一件没那么性感的事:一颗Token,能不能被稳定、便宜、规模化地生产出来。死磕这件事的,是一支从中国超级计算体系里走出来的年轻团队,是石科技。
来自主题: AI资讯
9088 点击 2026-05-30 10:03
 搜索
搜索
所有人都在比谁的模型参数更大,但真正决定AI能不能落地的,其实是另一件没那么性感的事:一颗Token,能不能被稳定、便宜、规模化地生产出来。死磕这件事的,是一支从中国超级计算体系里走出来的年轻团队,是石科技。

不用JAX,SpaceX正在用C语言编写的全新堆栈训练新模型。而且马斯克本人亲口承认,Grok 5已经用的就是这个新堆栈。按马斯克的说法,这种新堆栈能让大模型训练速度提升一个数量级。
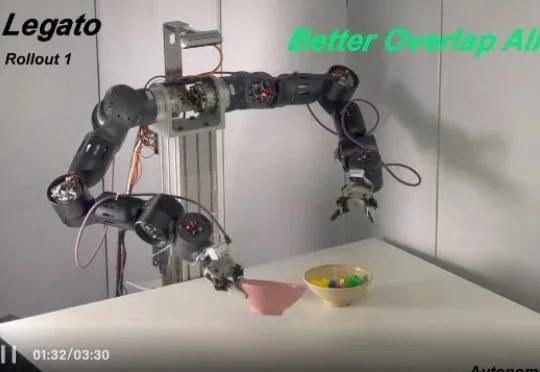
近日,千寻智能高阳团队的研究成果 《Learning Native Continuation for Action Chunking Flow Policies》 被机器人顶会 RSS 2026 接收!这项工作从训练机制出发,让机器人动作天然具有连续性,实现了 "连音" 般的流畅执行,在五个真实世界操作任务上超越了现有方法,为具身智能领域的动作生成研究提供了新的思路。
光正在进入AI算力系统,但这次不只是拿来传数据,而是直接参与计算。
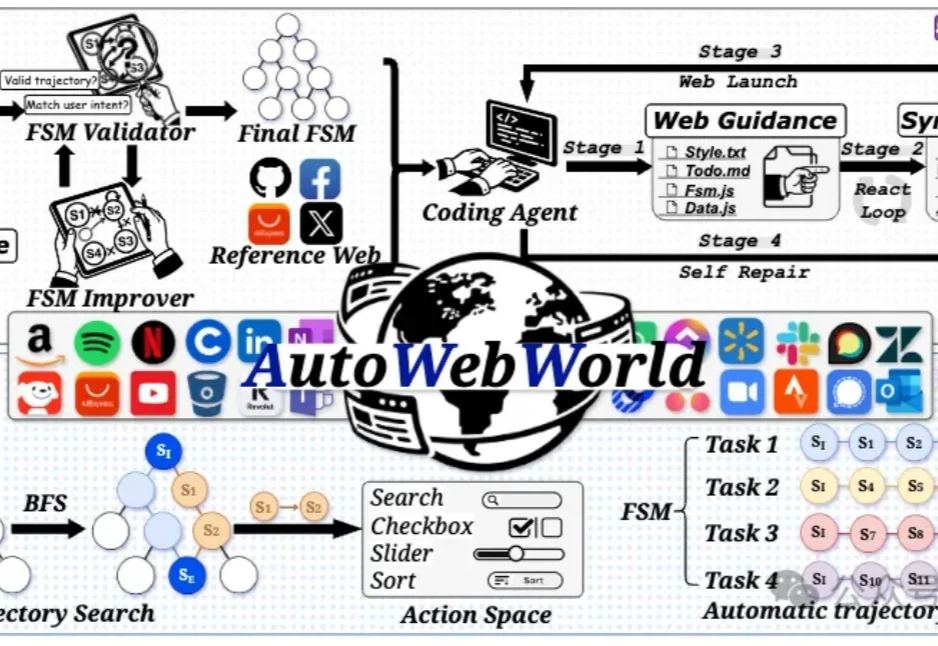
训练一个真正会用网页的GUI Agent,最自然的思路通常是: 去真实网站上操作,收集轨迹,再拿来训练。
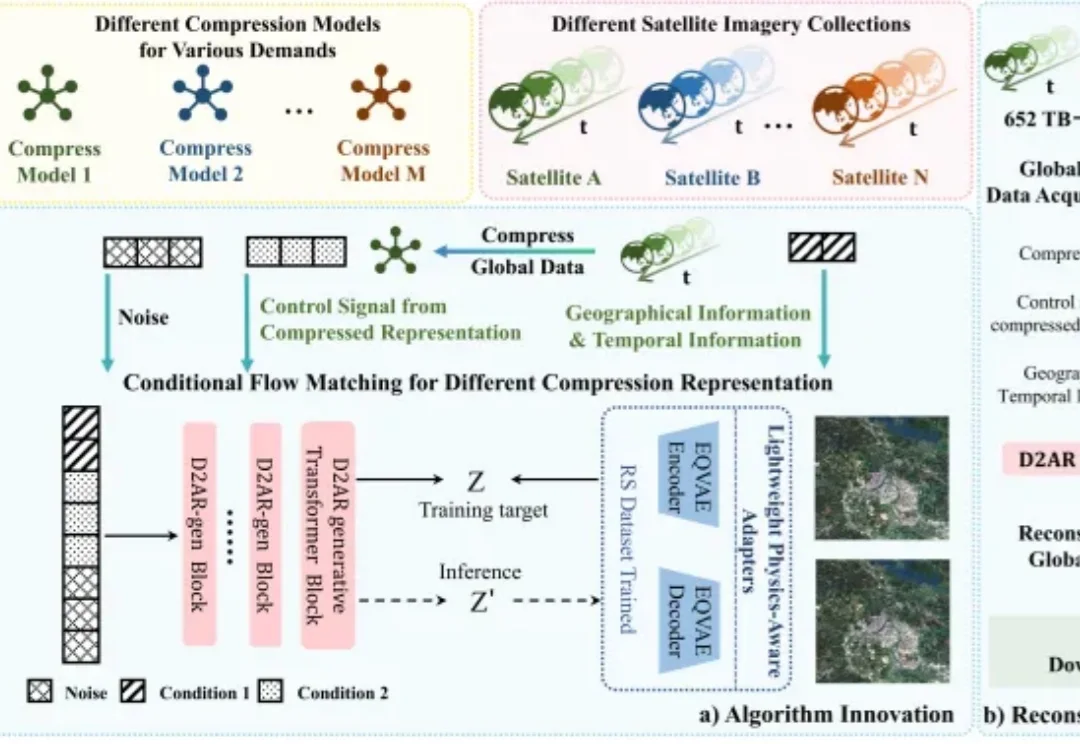
随着全球遥感卫星持续运行,地球观测数据正在快速增长。多源、多时相、多光谱遥感影像为国土监测、生态评估、灾害预警、气候变化研究等任务提供了重要数据基础,但也带来了显著的存储、传输和计算压力。
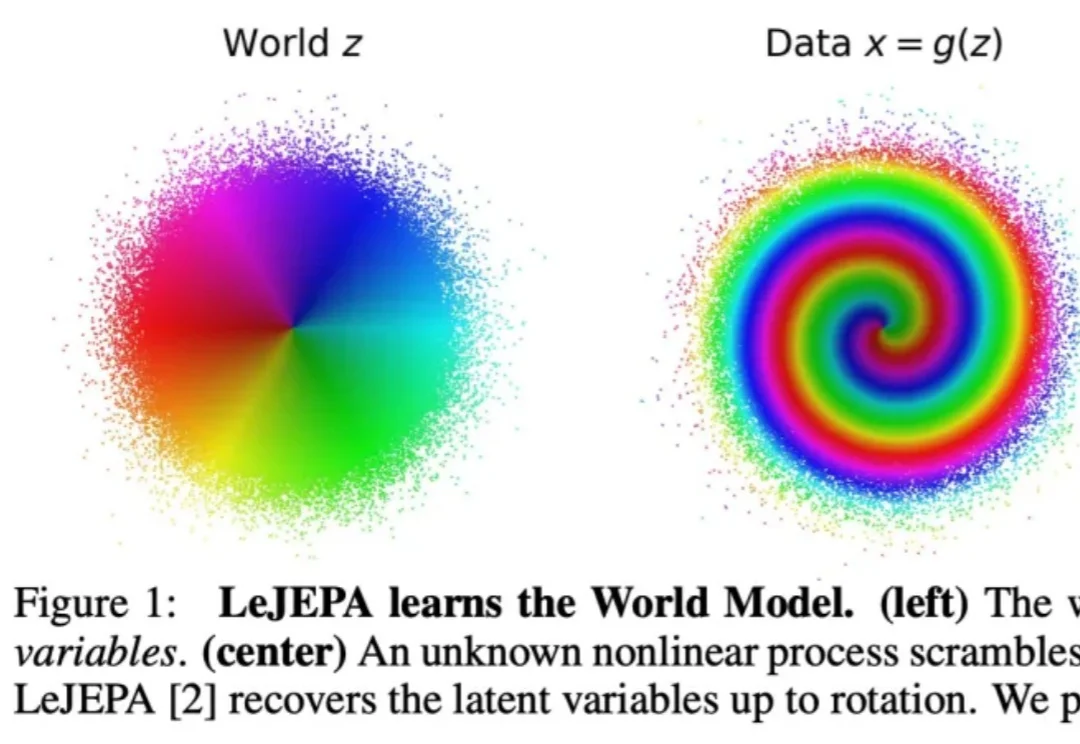
LeCun的LeJEPA到底有没有构建出世界模型?他本人最新发表的论文,解答了这个问题。
7×24,AI也吃不消。
过去的大模型 scaling law 通常回答的是:当模型参数量、数据量和训练计算量增加后,loss 会如何下降。
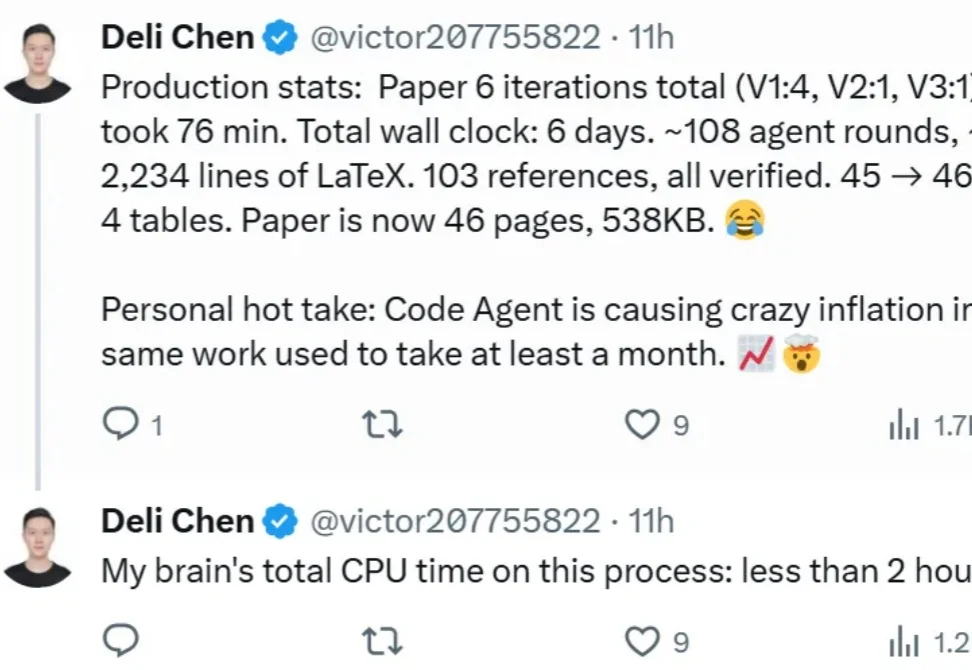
「借助 CodeAgent,我终于可以重新捡起很多过去因为精力不足而搁置的事情了,写博客就是其中之一。这篇博客大概 1% 是我写的,99% 是 Agent 写的 😂」。