
跨维智能又融资10亿,一家定义Physical Token经济学的具身世界模型公司
跨维智能又融资10亿,一家定义Physical Token经济学的具身世界模型公司2026年,具身智能赛道的融资热度仍在持续,但投资人的提问方式已经变了。
来自主题: AI资讯
9019 点击 2026-07-01 10:28
 搜索
搜索
2026年,具身智能赛道的融资热度仍在持续,但投资人的提问方式已经变了。
具身智能现在面临的问题,和自动驾驶几年前的困境非常相似。
近日,全球具身世界模型权威评测基准 WorldArena 公布最新榜单。在 5 月 25 日截止的最终榜单中,跨维智能登顶 Track 2 赛道全球第一。可以说是,在英伟达、谷歌等全球科技巨头深度布局、重兵把守的世界模型核心腹地,跨维智能实现了强势突围。
今年4月,具身智能领域发生了一件看起来不大、但意味深长的事。
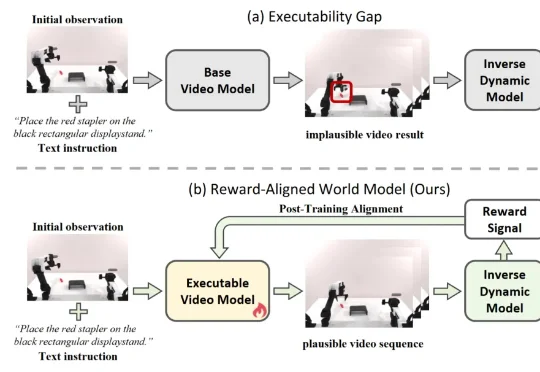
近期,利用视频生成模型为机器人构建 “世界模型”,已成为具身智能领域的热门技术路线。给定当前观测和自然语言指令,这类模型能够先 “想象” 出未来的视觉轨迹,再由逆动力学模型(IDM)将生成画面解码为机器人动作,从而形成 “先预测、后执行” 的解耦式规划范式。由于兼具较强的可解释性与开放场景泛化潜力,这一路线正在受到学术界和工业界的广泛关注。