
离开OpenAI和Google后,两位大模型核心负责人决定卷下一代架构
离开OpenAI和Google后,两位大模型核心负责人决定卷下一代架构曾经最相信强化学习的人之一,如今却认为:强化学习没有把我们带到 AGI。
来自主题: AI资讯
6799 点击 2026-08-05 15:49
 搜索
搜索
曾经最相信强化学习的人之一,如今却认为:强化学习没有把我们带到 AGI。

在日常摄影中,后期处理往往是决定照片最终观感的重要一步。
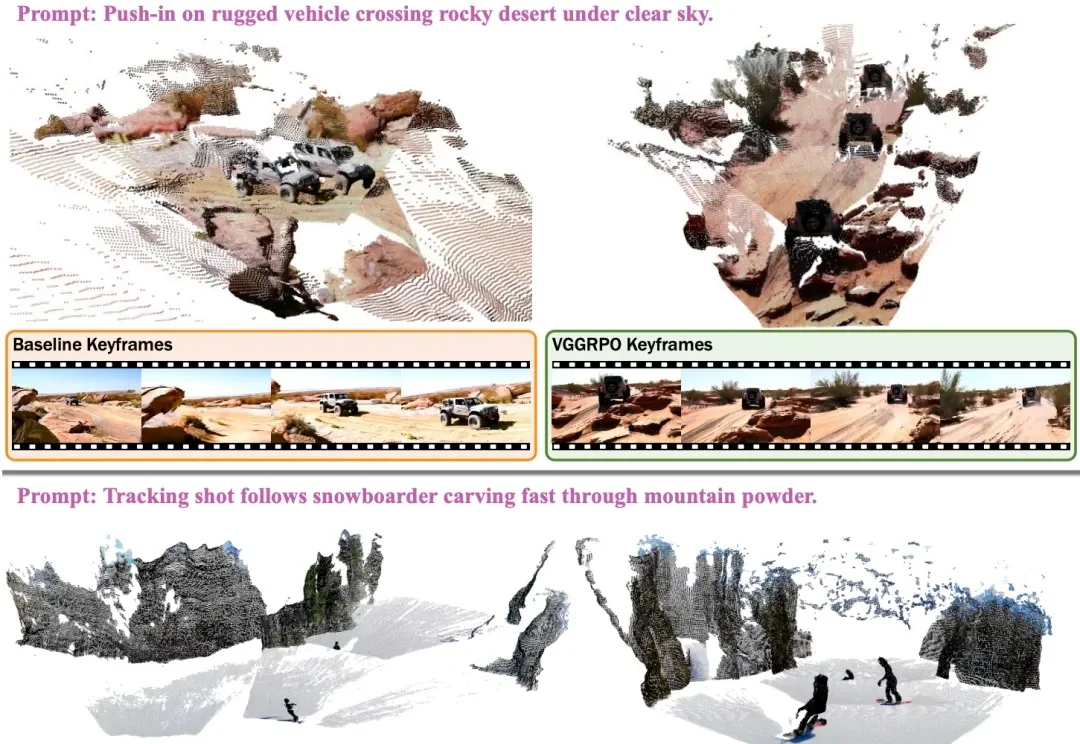
大规模视频扩散模型,画面越来越真,却总在“物理定律”上栽跟头。

WAIC 2026 期间,我们和另外几家媒体(机器之心是其中唯一的专业媒体)共同对来到中国的强化学习奠基人、2024 年图灵奖得主 Richard Sutton 做了一场群访。
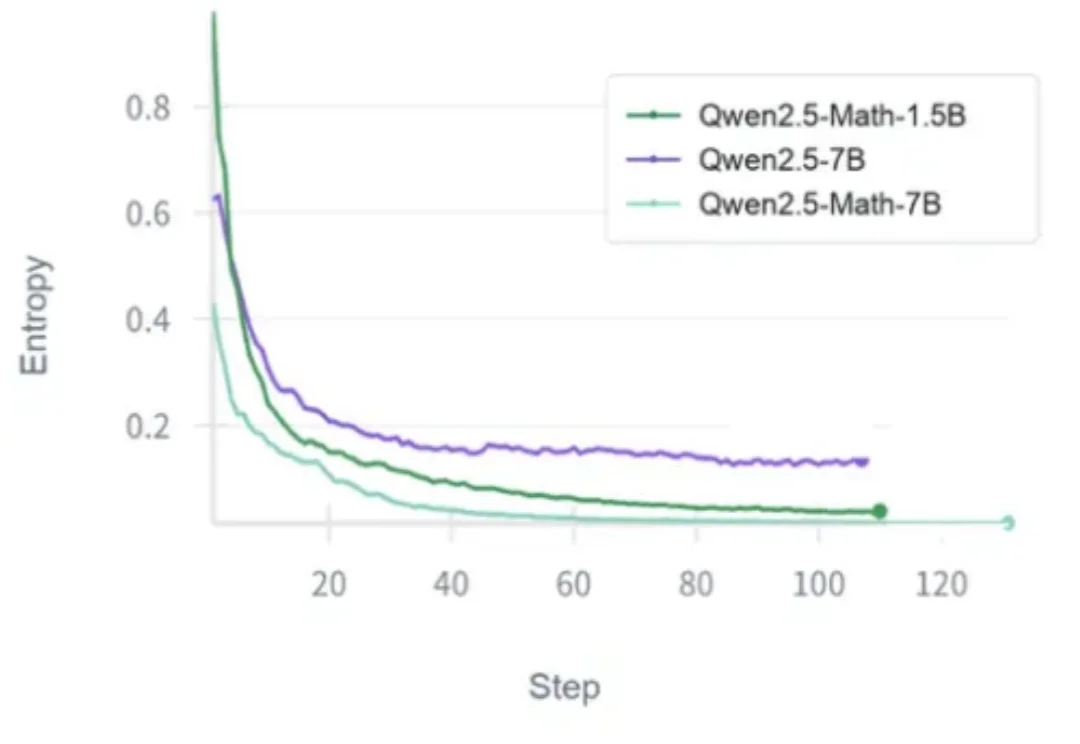
基于可验证奖励的强化学习(Reinforcement Learning with Verifiable Rewards,RLVR)正在成为大模型后训练的关键技术。数学题能判对错,代码能跑测试,可验证奖励让大模型可以通过强化学习持续提升推理能力。

年近 70 岁的图灵奖得主、强化学习之父理查德・萨顿(Richard Sutton),宣布创业了。本周一,Richard Sutton 宣布与 Khurram Javed 共同创立新公司 Oak Lab,要打破当前深度学习方式,用全新的理念构建 AGI。
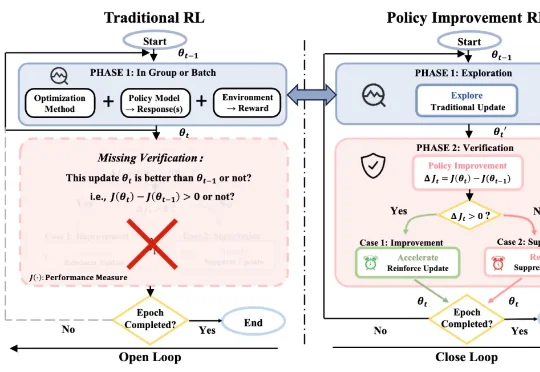
来自北航、北大、美团的研究团队提出了Policy Improvement Reinforcement Learning, PIRL,以及对应的落地算法 PIPO。这项工作关注的是大模型 RL 后训练中一个非常基础、但长期被默认跳过的问题:一次更新在当前数据上看起来优化了学习信号,是否就真的说明模型策略变强了?

ICML 2026大奖公布来了!ICML年度杰出论文奖和时间检验奖,正式公布。其中杰出论文共有9篇入围,含7篇研究论文及2篇立场论文,最终优胜奖3名和荣誉提名6名;ICML时间检验奖花落强化学习领域,DeepMind经典巨作再封神。
做大模型RL微调,你是不是也踩过这些坑?
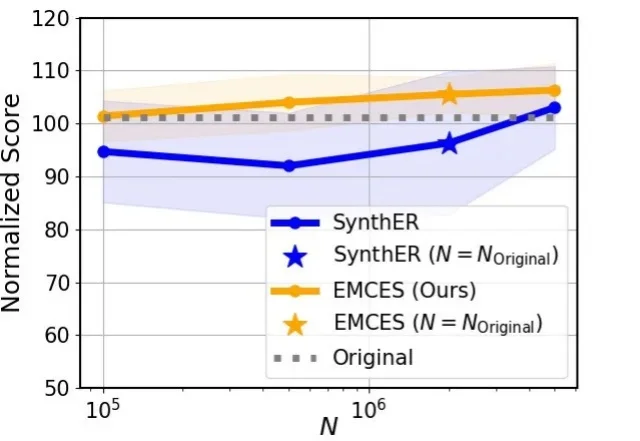
近年来,强化学习在游戏智能体、具身智能、大语言模型等领域取得了显著进展。然而,在真实世界中,强化学习仍面临一个核心难题:高质量样本的获取不仅成本高昂,还可能带来多种风险。因此,样本增强成为缓解强化学习中样本获取成本高、风险大等问题的重要途径之一。