
Z Potentials|CVPR 现场对话苏度科技团队:没有遥控器,没有隔离带,只有真实世界随机的考卷
Z Potentials|CVPR 现场对话苏度科技团队:没有遥控器,没有隔离带,只有真实世界随机的考卷2026 年 6 月的科罗拉多州丹佛市,全球计算机视觉与模式识别领域的顶级学术盛会 CVPR 正在召开,最前沿的视觉模型、机器人技术、下一代智能系统全都在同一个舞台上被反复讨论和辩证。
来自主题: AI资讯
9366 点击 2026-06-08 09:48
 搜索
搜索
2026 年 6 月的科罗拉多州丹佛市,全球计算机视觉与模式识别领域的顶级学术盛会 CVPR 正在召开,最前沿的视觉模型、机器人技术、下一代智能系统全都在同一个舞台上被反复讨论和辩证。
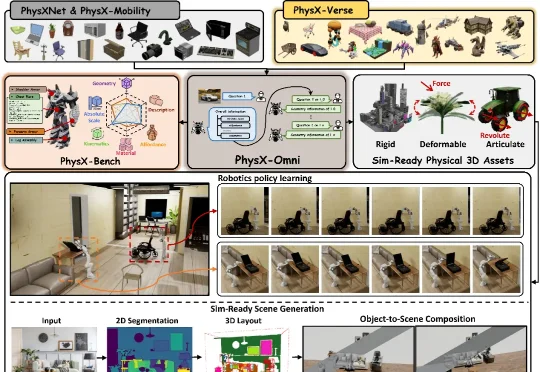
该论文第一作者为曹子昂,研究方向主要聚焦于 3D AIGC、Physical AI 与具身智能。论文主要合作者包括来自南洋理工大学的李海天、姚润茂、洪方舟、陈昭熹,以及大晓机器人的刘英豪和潘亮。通讯作者为南洋理工大学刘子纬教授。
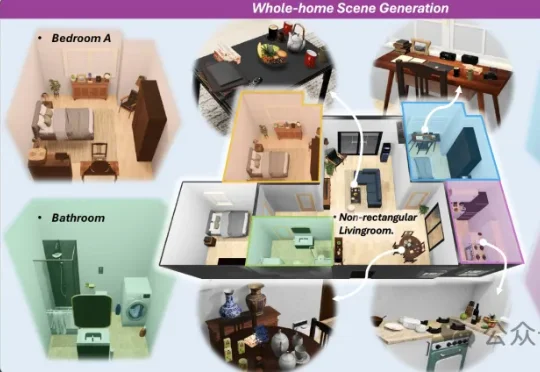
一觉睡醒,具身智能公司竟然也开始搞房地产了?!刚刚,大晓机器人联合港中文MMLab发布了一个新项目——Kairos-Homeworld,全球首个实现全屋三维生成与物体级全交互的统一框架。
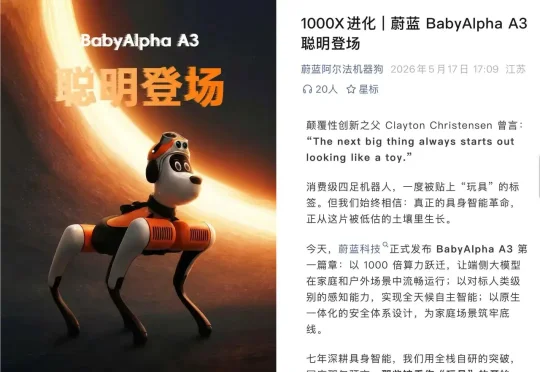
这家公司叫蔚蓝科技。前段时间,他们的新产品 ——BabyAlpha A3 机器狗引发了不小的轰动。不过,当时,很多行业讨论集中在参数本身:六颗国产芯片组成异构计算集群、端侧运行 70 亿参数大模型、感知系统全面升级,甚至第一次把高算力机器人压进了普通家庭可以认真考虑的价格区间……

近日,欧拉万象正式宣布再次完成超过亿元的天使轮融资,这也是欧拉万象三个月以来完成的第三轮融资。本轮融资由某产业资本、慕华科创、百度风投、玖兆投资、聚合资本联合投资,老股东持续跟投。这是欧拉万象继获得高瓴创投、五源资本、招商局创投等顶级机构密集加持后,再次迎来市场化与产业资本的重磅加注。

2026 AI赛道最火的概念——物理AI!
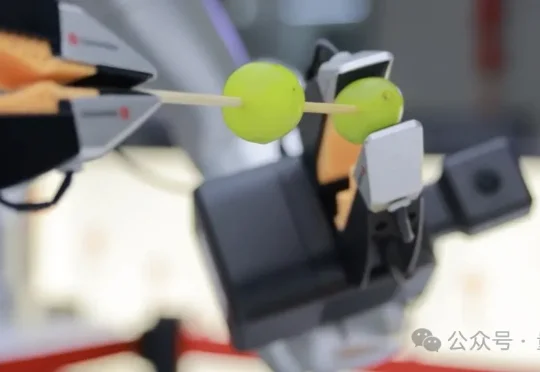
具身智能公司戴盟机器人(Daimon Robotics)新近完成亿元A轮融资,本轮融资由汇川产投和中国电信联合投资。与此同时量子位还获悉了关于这家公司的另一则消息——阿里通义实验室前多模态研究专家原玮浩加入戴盟,担任首席AI科学家。

今日(6月3日)绳驱AI机器人公司星尘智能(Astribot)完成B轮系列融资——三个月内连续完成3轮融资,融资总额超10亿元,估值突破百亿元,跻身中国具身智能第一梯队。
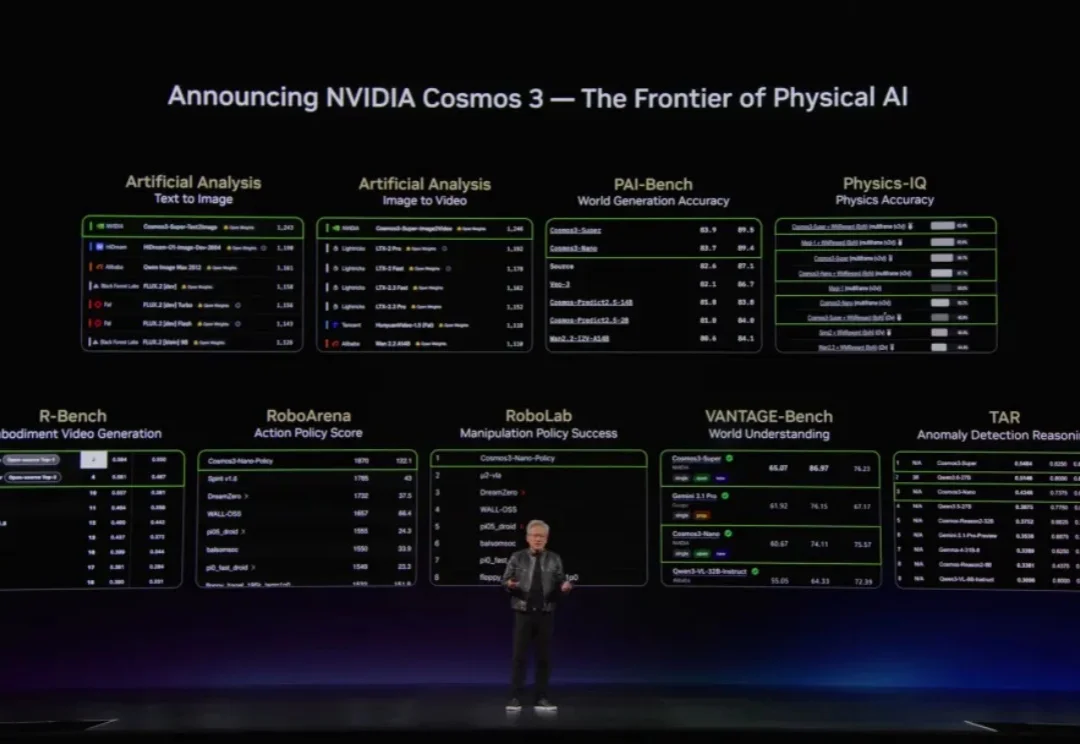
6 月 1 日,老黄在 GTC 上用了不小的篇幅讲物理 AI 和具身智能,并重磅发布了 Cosmos 3。英伟达将其定义为面向 Physical AI 的最新前沿模型,也是全球首个完全开放的全能模型,原生具备视觉推理、世界生成和动作生成能力。

刚刚过去的GTC Taipei上,最备受关注的,莫过于Cosmos 3。