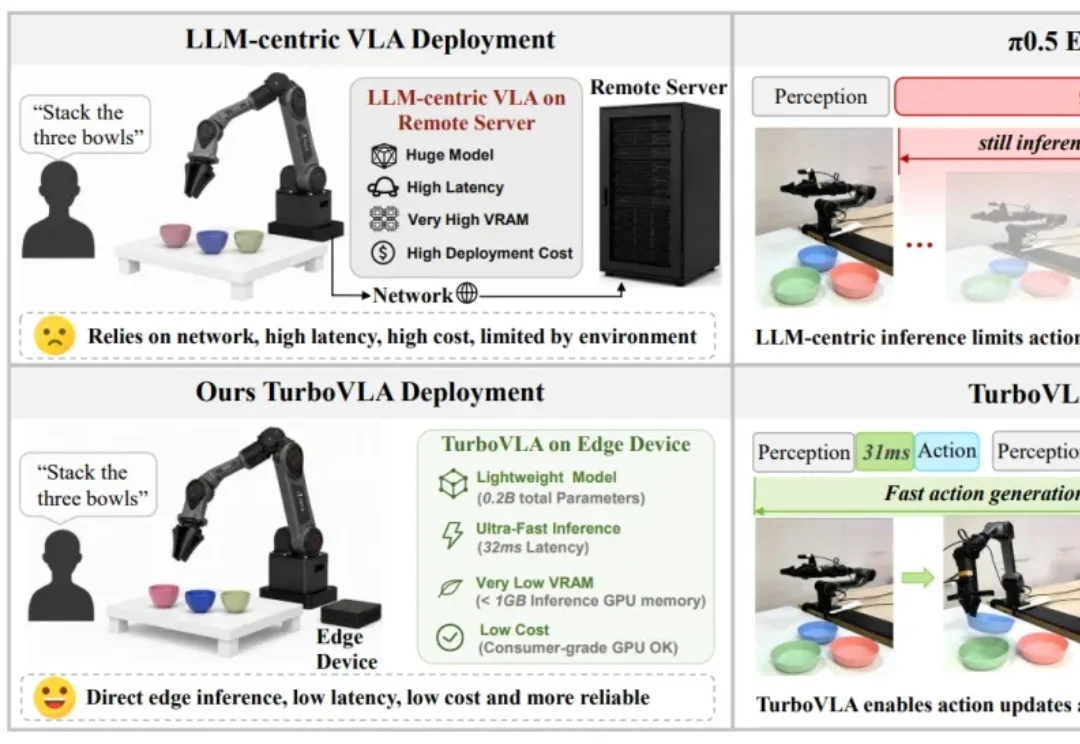
VLA动作预测必须经过LLM吗?TurboVLA仅0.2B参数,RTX 4090上跑出32Hz在线动作预测
VLA动作预测必须经过LLM吗?TurboVLA仅0.2B参数,RTX 4090上跑出32Hz在线动作预测近年来,视觉 — 语言 — 动作模型(Vision-Language-Action Model,VLA)正逐渐成为通用机器人控制的重要技术路线,但当这些模型真正进入高频闭环执行时,一个矛盾越来越突出:模型越来越大、语义能力越来越强,动作更新却未必足够快。
来自主题: AI技术研报
9854 点击 2026-08-03 15:30